高分一号卫星影像自动云检测
2018-04-27 08:19康一飞
地理空间信息 2018年4期
钟 静,康一飞,韩 昱,王 欢
(1.广东省国土资源技术中心,广东 广州 510075; 2.苏州中科天启遥感科技有限公司,江苏 苏州 215004 3.西安航天天绘数据技术有限公司,陕西 西安 710061; 4.四川省遥感信息测绘院,四川 成都 610100)
1 研究现状
影像云检测一直是遥感领域中的研究热点。光谱阈值法是最简单有效的云区提取算法,它基于云和地物在可见光波段光谱特性差异,通过亮度阈值实现云与非云目标的区分[1-4]。常用经验阈值或基于最大类间方差(Otsu)原理的自动阈值。此类算法快速有效,但不可避免地会对积雪、建筑物、裸地等高亮目标产生误判,且无法定性筛选无云影像。充分利用热红外信息的多光谱综合法[5]可有效改进检测效果,但它要求影像有足够的波段,主要应用于高光谱相机和红外多光谱相机影像,不适用于高分一号卫星影像。
另一类方法通过分析影像上云和地物纹理特征的差异,提取合适的特征或特征组合区分云和地物[5,6]。高分一号卫星影像上云的种类繁多,不同种类云的特征在各个特征空间内的分布都不集中,精确提取有一定难度。一些改进后算法综合利用影像的辐射和纹理特征,以分类的方式得到云、水、晴空、云影等不同类别[7,8]。这些算法在一定程度上提高了检测精度,但需要采用大量经过人工解译且种类不同的含云影像作为样本对分类器进行训练,极其耗时、费力,且算法效率普遍较低,难以满足高分一号卫星海量影像自动化处理的需要。
基于同一地区时相相近的两幅或两幅以上影像进行云检测也是一类常见的方法。这类方法将云看作影像中的变化目标,使用变化检测的思想去检测云[9]。除此之外,基于立体视觉方法给云检测问题提供了一个新思路[10]。这类基于多幅影像的云检测方法常常与基于单幅影像的云检测算法联合使用,可有效提高检测精度,但缺点是对数据要求较高,影像本身需具备比较精确的地理信息,难以运用于1A级影像产品。
2 算法与流
提出一种适用于高分一号卫星影像的自动云检测算法,如图1所示。首先通过无云和含云样本影像,分别粗估最高亮度和最低亮度阈值,分别用于保证云的准确率和查全率;然后在双阈值的辅助下,定性筛选无云影像,并计算含云影像的精确亮度阈值。最后,对阈值分割出的云区执行形态学综合运算,改善云检测精度,得到最终的含云量和云掩模。

图1 整体流程图
2.1 灰度直方图与最高亮度阈值
灰度直方图提供了一种确立图像中简单物体亮度边界的有效方法。对于一幅不含云的影像,可近似认为其最大灰阶低于最高亮度阈值。但考虑到地物本身辐射特征的复杂性,以及传感器CCD在某些情况下的异常响应,一般的基于灰度统计的分析中,会舍弃直方图高亮度一端1%比例的像素[11]。本文记录舍弃后的末端截断灰阶代替实际最大灰阶,用于粗估最高亮度阈值。具体步骤如下:
1) 选取一定数目不含云的影像,应尽量包含多种地物,如植被、城镇、水面等,但不应包含积雪;
2)逐张统计影像灰度直方图,舍弃直方图位于高亮度一端占总数1%的像素,记录末端截断阈值Tend;
3)将所有的Tend按从高到低的顺序排列,舍弃最高的1%,记录剩余Tend的最大值,即为最高亮度阈值Thigh。
2.2 Otsu算法与最低亮度阈值
Otsu算法也称最大类间方差算法,它以目标和背景的方差最大为原则,将图像按灰度级聚类分成背景和目标两部分[11,12]。在已知影像多云的情况下,Otsu算法可用于云区的快速检测和提取[2]。但对于少云和无云影像,Otsu阈值极易被确定在两类地物之间,从而造成大量的误判。因此,Otsu算法不能直接用于云检测,但可用来粗估最低亮度阈值,具体步骤如下:
1)选取一定数目的多云影像;
2) 通过Otsu算法逐张自动计算亮度阈值,并对影像进行灰度分割,得到粗略云检测结果;
3)人工检查粗略云检测结果是否基本符合实际。若出现严重的错检或漏检,则移除该异常影像,再增补一张样本影像,重复1)~2)步;
4)将所有TOtsu按从低到高的顺序排列,舍弃最低的1%,记录剩余TOtsu的最小值,即为最低亮度阈值Tlow。
上述两个阈值粗估过程中,为保证粗估结果的合理性,样本影像数目应多于100幅。对Tend和TOtsu进行排序后,分别舍弃占总数1%的最高和最低值,这是由于这些统计数字近似呈高斯分布,舍弃部分极端值后的结果更符合实际需求。
2.3 计算精确亮度阈值
对于一张待检测影像,首先通过最高亮度阈值定性筛选无云影像,而对于含云影像,则以双阈值为限定条件执行Otsu计算,得到精确阈值。具体步骤如下:
1)若影像灰度直方图中,大于Thigh的像素比例极小,则定性判定为无云影像。否则,执行下一步;
2)选取直方图中位于高阈值Thigh和低阈值Tlow之间的部分执行Otsu计算,得到阈值T;
3)根据阈值T,对影像执行灰度分割,阈值以上的部分即为初始云区。
2.4 云区形态学综合
如果仅使用灰度分割的方式,则不可避地引发对高亮度似云目标的误判。传统算法常利用建筑物、裸地尺寸远小于云层的特点,对云区进行“腐蚀-膨胀”形态学处理[2]。但这会较大程度上改变云区的轮廓,降低检测准确率。本文通过基于目标面积的形态学腐蚀和带限制条件的形态学膨胀来解决这一问题。具体布步骤如下:
1) 检测面积小于K1的云区,并认为这是高亮噪声(筑物、裸地等),予以删除,即标记为非云;
2)在对云区执行形尺度为K2的形态学膨胀,但膨胀的过程中同时判断新增像元的亮度,若亮度小于Tlow,则该像元不予膨胀;
3)检测面积小于K3的非云区,并认为这是细小云缝,予以删除,即标记为云。
上述云区形态学运算过程中,K1、K2和K3均为配置参数,可根据具体情况改动。例如,若场景中常含有大型人造目标(机场等),则应设定一个较大的K1来避免错检;若需要充分挖掘云缝中的有效信息,则应设置一个较小的K2和K3;若重点关注云区的查全率,不希望得到过于破碎的云掩模,则应设置一个较大的K2和 K3。
3 实验与分析
以高分一号卫星1A级全色影像为例,完成上述4 个步骤,得到最终的云掩模。并通过本文算法与传统Otsu阈值,以及传统的“腐蚀-膨胀”形态学运算作对比,验证本文算法的有效性和优势。
3.1 阈值分割结果评价与对比
分别选取3幅无云、少云和多云影像作为代表(图2、3、4),展示在双阈值限定条件下的精确阈值分割过程,同时选取传统Otsu阈值分割后结果作对比。其中b图两侧红色直线代表本文算法得到的双阈值:Thigh=578、Tlow= 243。在前期传感器校正及辐射定标工作没有较大改动情况下,上述双阈值有普适性,适用于所有高分一号卫星1A级全色影像。b图中间的紫色直线表示以双阈值为限定条件下的Otsu阈值。d图蓝色直线代表传统Otsu阈值。

图2 无云影像阈值分割
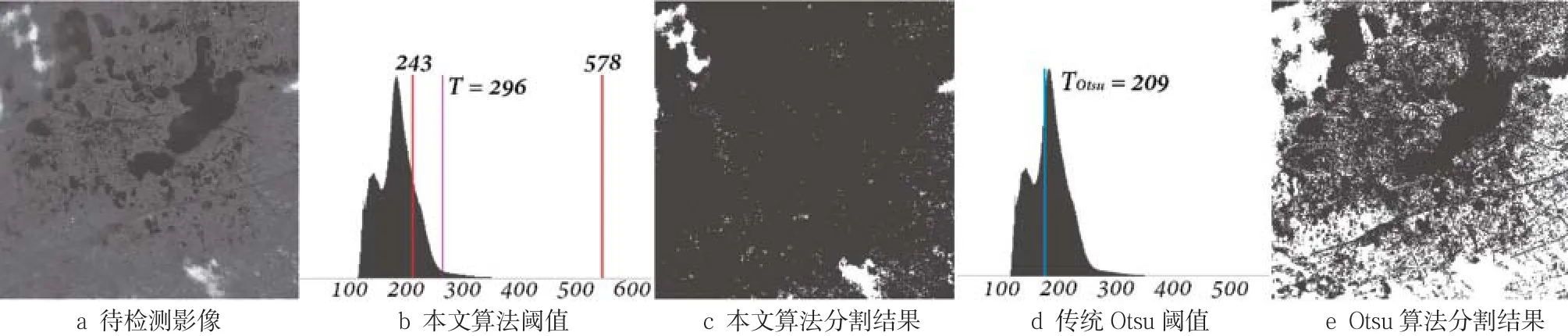
图3 少云影像阈值分割
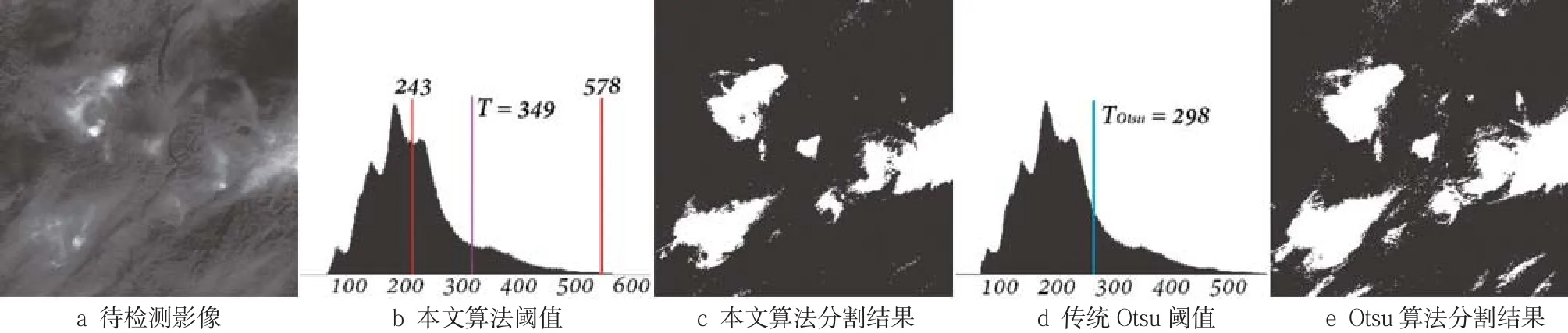
图4 影像阈值分割
可以看出,对于多云影像(图4),传统Otsu分割算法和本文阈值分割算法均作出了较为精确的判断。但对于无云(图2)和少云(图3)影像,传统Otsu分割算法出现了较为严重的误判。相比之下,本文算法有较大优势,能对少云影像作出比较精确的判断,也能定性识别出无云影像。通过图3、4可以看出,仅使用阈值分割会造成结果中有很多由高亮度建筑物和裸地等引起的噪点,因此要执行云区形态学综合。
3.2 云区形态学综合评价与对比
以上述少云影像(图3)为例,对3a中所示的初始阈值分割图进行形态学综合。同时,将本文形态学算法与传统的“腐蚀-膨胀”形态学运算作对比,两种云区综合算法结果展示在图5中。同时,选取图5a左上角红色方框内局部区域,分别将腐蚀亮斑、条件膨胀、填充云缝3个子步骤的中间结果展示在图6中。
从图5、6可以看出,经过形态学综合处理后,云掩模中的高亮度、小面积噪声得到消除,且云缝得到填充,方便后续使用。相比于传统的“腐蚀-膨胀”算法,本文使用的形态学算法更好地保留了云的真实边缘轮廓,有效地降低了错检和漏检率。
4 结 语

图5 云区形态学综合

图6 云区(局部)形态学综合
针对高分一号卫星影像普遍含云且光谱探测范围窄、波段少、数据量大的特点,提出一种基于自适应阈值和形态学综合的云检测算法。实验表明,该算法简单有效,能对少云、多云影像作出比较精确的检测,也能定性识别出无云影像,适用于全色、多光谱影像,可满足海量数据自动化处理的需要。
[1] 李德仁, 童庆禧, 李荣兴,等. 高分辨率对地观测的若干前沿科学问题[J].中国科学:地球科学, 2012(6):805-813
[2] 陈翠婵, 黄国森, 王越,等. 含云卫星影像配准算法研究[J].测绘通报, 2016(10):81-84
[3] 吴磊, 康一飞, 李娜娜,等. 大面积含云卫星遥感影像匀光算法的改进[J].地理空间信息,2016,14(1):41-43
[4] 秦永, 付仲良, 周凡,等. 一种利用TM影像自动检测云层的方法[J].武汉大学学报:信息科学版,2014,39(2):234-238
[5] 陈振炜, 张过, 宁津生,等. 资源三号测绘卫星自动云检测[J].测绘学报, 2015, 44(3):292-300
[6] 李腾腾, 唐新明, 高小明. 资源三号影像朵云识别中云雪分离研究[J].测绘通报, 2016(2):46-49
[7] 胡根生, 陈长春, 梁栋. 联合云量自动评估和加权支持向量机的Landsat图像云检测[J].测绘学报,2014,43(8):848-854
[8] 谭凯,张永军,童心,等.国产高分辨率遥感卫星影像自动云检测[J].测绘学报, 2016, 45(5):581-591
[9] 方勇, 常本义. 联合应用多传感器影象消除云层遮挡影响的研究[J].中国图象图形学报,2001,6(2):138-141
[10] Wu T, Hu X, Zhang Y, et al. Automatic Cloud Detection for High Resolution Satellite StereoImages and Its Application in Terrain Extraction[J]. ISPRS Journal of Photogrammetry &Remote Sensing, 2016(121):143-156
[11] GadallahFL, Csillag F, Smith E J M. Destriping Multisensor Imagery with Moment Matching[J]. IntJRemote Sensing,2000,21(12):2 505-2 511
[12] Nobuyuki O. A Threshold Selection Method from Gray-Level Histograms[J]. IEEE Transactions onSystems Man & Cybernetics,1979, 9(1):62-66
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
摄影之友(影像视觉)(2018年12期)2019-01-28
潍坊学院学报(2016年6期)2016-04-18
中国继续医学教育(2015年2期)2016-01-06
计算机工程(2015年8期)2015-07-03
振动、测试与诊断(2014年6期)2014-03-01
现代检验医学杂志(2014年1期)2014-02-06
现代检验医学杂志(2014年5期)2014-02-02