
船用混合储能系统分布式控制技术研究
2018-04-27 02:46:55刘胜苏鹏
声学与电子工程 2018年1期
刘胜 苏鹏
(哈尔滨工程大学自动化学院,哈尔滨,150001)
对于船舶综合电流推进系统而言,单一种类的储能元件无法在有限的空间内同时满足系统大功率负载的暂态及稳态电能需求。混合式储能技术是解决这一问题的有效方法,其基本原理是将超级电容和电池两种不同的储能元器件加以组合,经由DC/DC变换器并联构成混合式储能系统。该混合式储能技术综合了两者优点,使得储能系统可以同时拥有高功率密度、高能量密度以及快速动态响应等优良特性,即控制具有快速响应及高功率密度特性的超级电容来提供脉冲负载电能,控制具有高能量密度特性的电池来提供系统稳态负载电能。
船舶综合电力推进系统负载功率较大,与现有的储能模块所能提供的功率及电压等级均不相匹配。单个储能模块显然不能满足船舶电力推进系统的用电需求,因此分布式储能技术是船用储能系统的最佳之选[1-5]。该技术将储能系统划分为多个储能单元,灵活地分布在船舱各处,各个储能单元经由电缆互联,彼此间互不通信,构成一个庞大的分布式储能系统。而对于此类分布式系统而言,最好地协调控制方法便是分布式控制技术。下垂控制方法便属于分布式控制技术,其常用于控制实现直流电网中发电单元输出能量的比例分配。现有的下垂控制仅能保证各储能单元的稳态输出功率比例分配,没有综合考虑不同储能介质的动态特性。因此,本文将采用一种改进的下垂控制方法,引入虚拟电容下垂控制概念。该虚拟电容下垂控制方法控制超级电容变换器释放和吸收脉冲负载电能,实现混合式储能单元输出功率的快慢动态分配。
1 储能系统结构组成及数学模型
中压直流船舶综合电力推进系统及其储能系统结构框图如图1所示。综合电力推进系统中包含发电系统、配电系统、推进系统、区域负载、脉冲负载以及船用混合式储能系统。从图中可以看出,船用混合式储能系统有多个混合式储能单元组成,每个存储单元均含有超级电容及电池两类存储介质。超级电容和电池分别经由两个独立的隔离式双向 DC/DC变换器与直流母线相连,以便于二者充放能量的独立控制。
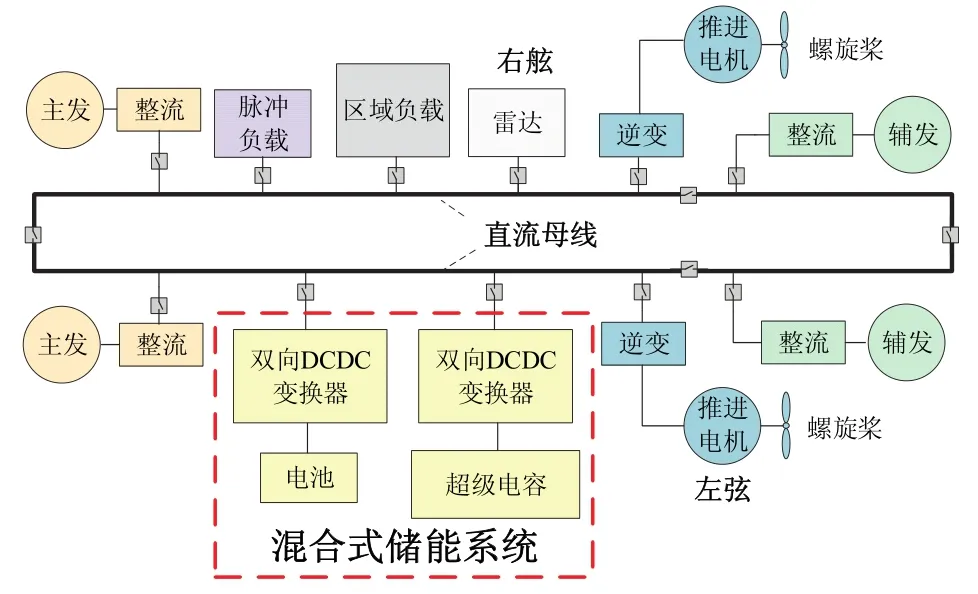
图1 中压直流船舶综合电力推进系统组成结构
双向 DC/DC变换模块采用隔离升压式全桥变换器,该变换器具有大容量、高变比的特点。由于隔离升压式全桥双向DC/DC变换器组成结构复杂,含有多个开关管,变换器运行过程中存在着多种导通状态,具有较强的不连续性,因此本文采用状态空间平均值法对该 DC/DC变换器进行建模,可得平均值数学模型如下:
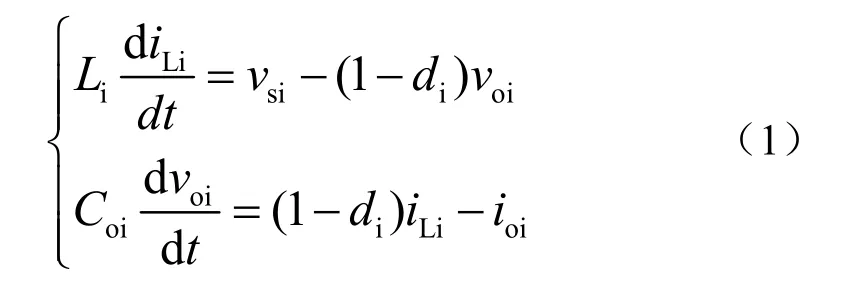
其中,di为等效的DC/DC变换器占空比,与实际的占空比相差一个DC/DC隔离变压器变比n;vsi为源侧输入电压,voi为输出电压,Li为源侧电感,Coi为输出电容,iLi为电感电流,ioi为输出电流。
虽然该模型省却了 DC/DC变换的高频谐波特性,但其精度已足够满足本文控制系统设计的需求。
2 分布式控制原理
本文中的电池控制将采用传统的下垂控制方法,其数学表达式如下所示:

若变换器输出电压回路无稳态控制偏差,式(2)可以保证并联变换器分配到的稳态负载功率反比于下垂系数,即下垂系数越小,分配的负载功率越大,反之,下垂系数越大,分配的负载功率则越小。
超级电容是一类具有高功率密度、低能量密度的存储介质,因此我们希望在系统功率失衡的暂态过程时释放或吸收瞬时能量,而在系统趋于稳态时则不工作,即高频时输出功率较大,低频时输出功率较小或不输出。这种思路对应于下垂控制参数的选择原则上,相当于在高频(暂态)时施加一个较小的下垂系数,而在低频(稳态)时施加一个较大的下垂系数,即具有电容的频率特性。因为该方法相当于在超级电容输出端口侧串联了一个虚拟电容,所以将其称之为虚拟电容下垂控制,其数学表达式如下所示:

其中, Cdroop为方法中所施加的虚拟电容下垂控制系数。
在混合式储能系统分布式控制系统实施过程中,单个混合式储能单元内的两个并联变换器输出电压给定标准值往往设定为一致,即:

单个储能单元的总电流输出为两个变换器输出电流之和:

假定变换器的输出电压控制环具有较高的动态特性,则在电压内环控制带宽范围以内,变换器输出电压的实际值即为其给定值。因此,在忽略传输线阻抗的条件下,两个并联的变换器输出电压应相同,综合式(2)~(4),则有:

从式(5)和式(6)可以得出,
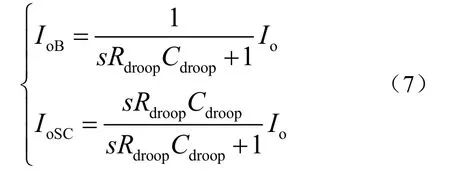
分析式(7)可以看出,电池的输出电流相当于经过了一个一阶低通滤波器,仅输出低频电流;而超级电容的输出电流则相当于经过了一个一阶高通滤波器,仅输出高频电流,即实现了超级电容输出暂态瞬时的功率,而电池则输出稳态平滑的功率。
3 分布式控制器的设计
3.1 双向DC/DC变换器电压控制回路
下垂控制的基本思路在于引入虚拟电阻或虚拟电容概念来改变双向 DC/DC变换器输出电压的给定值,因此控制应建立在输出电压控制回路之上。对于 DC/DC变换器输出电压的控制,本文选用了经典的双环控制策略,即输出电压为外环,电感电流为内环,具体的控制结构框图如图2所示。
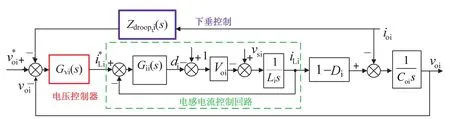
图2 DC/DC变换器双环控制结构框图
从图2中可以推出双向DC/DC变换器电感电流控制回路闭环传递函数为:

其中,kpi和kii分别为电感电流控制器的比例参数和积分参数。
对于级联式控制系统而言,内环控制带宽高于外环控制带宽,以使得内外环动态特性解耦,便于实现控制

因此,在计算电压外环控制回路闭环传递函数时,可将电流内环控制传递函数近似等效为常数1。电压外环的闭环传递函数为:

其中,kpv和kiv分别为电压外环控制器的比例参数和积分参数。
从式(8)及(10)可以看出,电流内环及电压外环控制系统可以等效为典型的二阶系统。在系统参数已知的前提下,控制器参数可以通过电压环及电流环设计的控制带宽ωn和阻尼比ξ直接计算而得,其具体关系式如下:
3.2 虚拟电容下垂控制具体设计及参数特性分析
在上一节中的分析中可以看出,变换器输出功率与其端口的输出阻抗成反比。当输出阻抗较大时,则分配的负载功率较小,当输出阻抗较小时,分配的负载功率则较大。上节所述的虚拟电容下垂控制技术便是基于这种控制思想而提出的。但在上节中,我们假设电压环控制带宽为无限大,忽略了电压环有限控制带宽对虚拟电容下垂控制效果的影响。在实际系统中,电压环响应速度的快慢势必将影响到虚拟电容的具体实施效果。从图2的控制系统结构框图可以推导出DC/DC变换器的实际输出阻抗:
从式(12)中可以看出,DC/DC变换器的输出阻抗不仅与设定的下垂系数Zdroop(s)有关,还与变换器的输出电容以及电压环的控制器Gvi(s)相关。为了进一步量化说明以上三个参量对 DC/DC变换器输出阻抗的影响,本文绘制了不同的电压环控制带宽下及输出电容下的阻抗特性 bode图,如图3及图4所示。
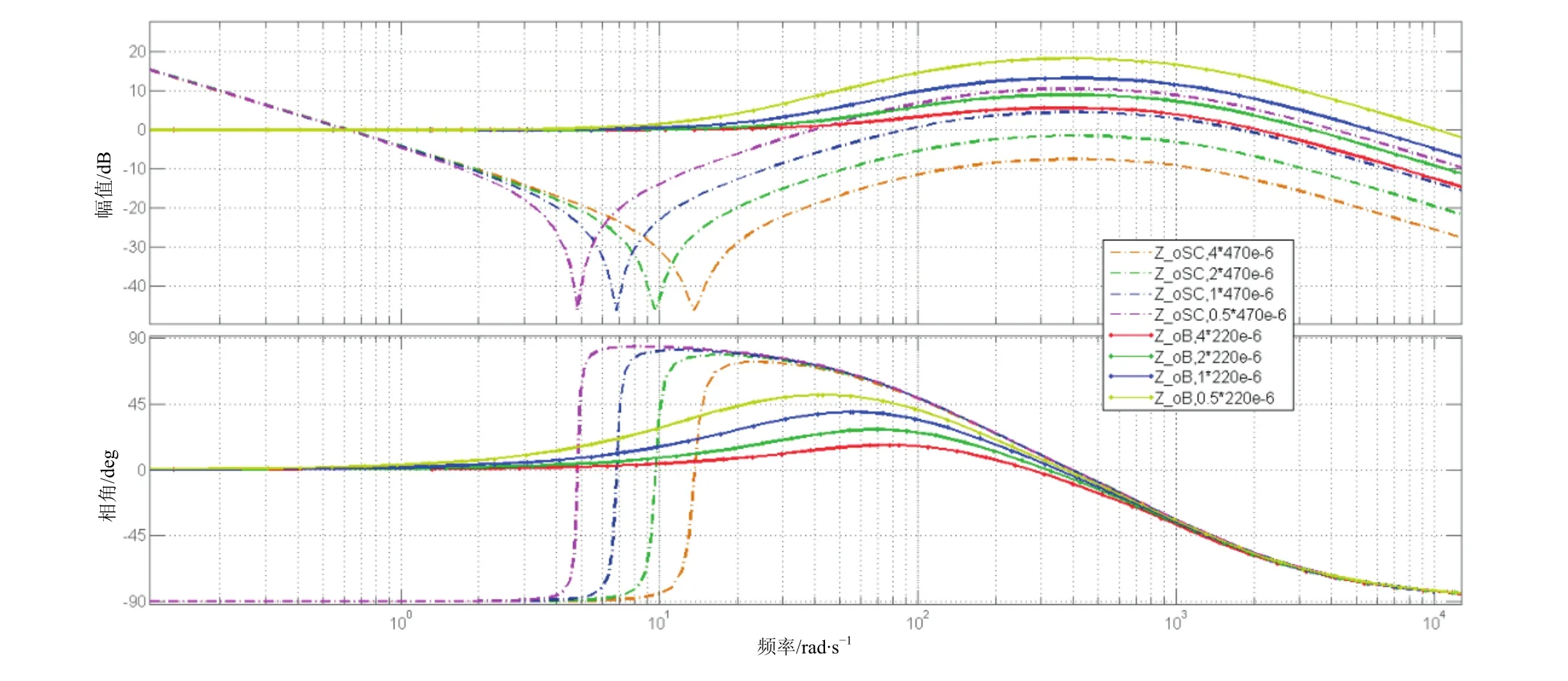
图3 输出电容变化时DC/DC变换器阻抗特性bode图
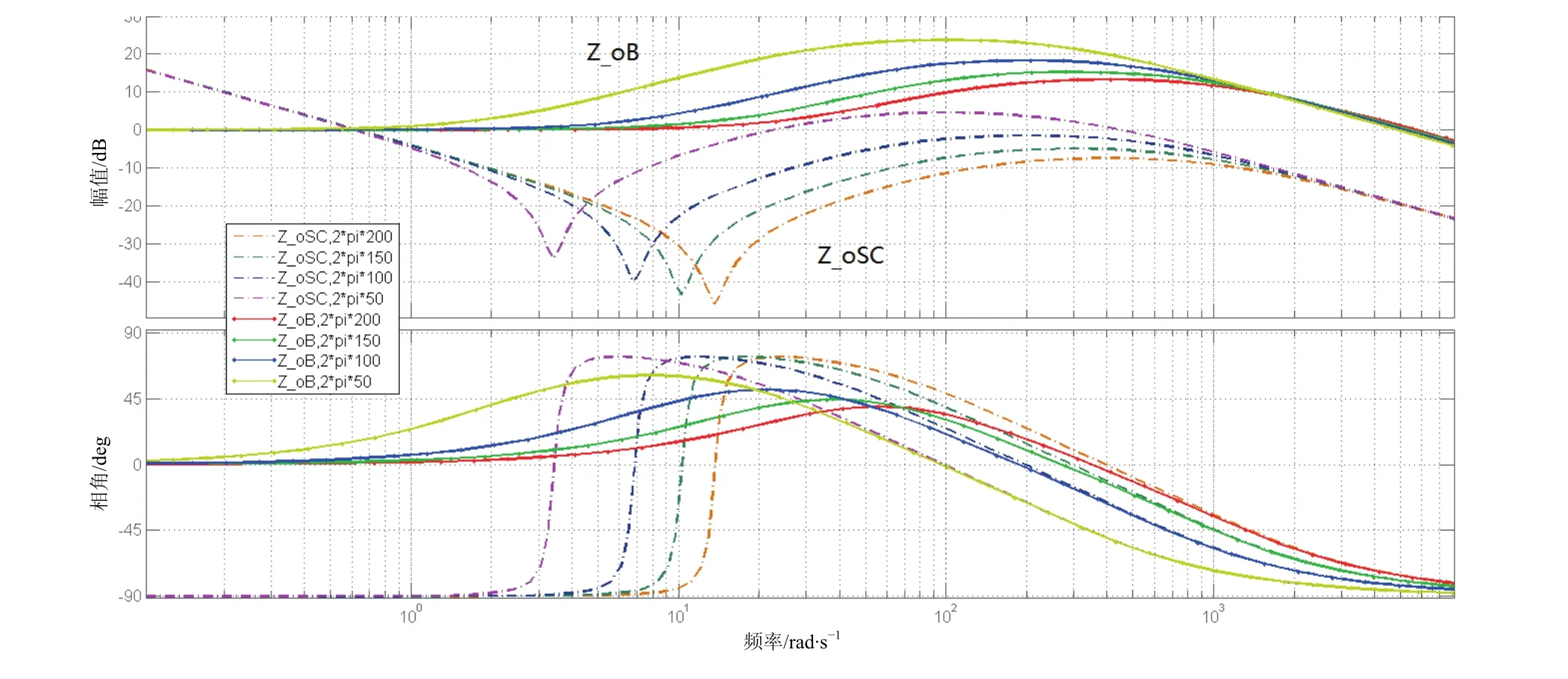
图4 电压环控制带宽变化时DC/DC变换器阻抗特性bode图
从图中可以看出,在角频率小于1 rad/s的低频段,无论输出电容及电压环控制带宽如何变化,采用传统下垂控制的电池变换器输出阻抗都将远远小于采用虚拟电容下垂控制的超级电容变换器的输出阻抗,即:

这也就意味着在低频段,超级电容变换器在虚拟电容下垂控制器的作用下将表现出高输出阻抗特性,而其输出的功率则反比于其输出阻抗而变得很小,这也和本文之前所做的分析相吻合,即超级电容在趋于稳态低频段输出较小甚至不输出功率。此时,储能系统输出功率主要由电池来承担。
图3中高频段变换器的输出电容及电压环控制带宽将极大的影响到变换器的实际输出阻抗。采用虚拟电容下垂控制的变流器输出阻抗由于端口输出滤波器而存在一个幅值低峰值,当变换器输出电容变小,该低峰值的位置将由高频段向低频段移动,会在较低频段偏离期望的虚拟电容阻抗特性。而且当输出电容变小时,虚拟电容控制下的变流器输出阻抗的高频段幅值特性增大,这与设计初衷相违背。同样,从图3中可以看出,对于虚拟阻抗控制下的电池 DC/DC变换器而言,其输出电容的变小同样会使得电池变流器的输出阻抗在高频段幅值增加,虽与电池高频段不输出功率的设计初衷并不相违背,但较小的输出电容有可能会使得系统变得不稳定。因此,在实际应用中,电池的输出电容不应设计的过低。
图4是电压环控制带宽发生变化时的变流器输出阻抗特性。从图中可以看出,低频段和超高频段的 DC/DC变换器输出阻抗特性都不会受到电压环带宽的影响,中频段阻抗特性受到的影响则比较大。当虚拟电容控制的变流器电压环控制带宽变小时,其输出阻抗会在较低频率点开始偏离期望的虚拟电容特性,整条幅值特性曲线会向坐标轴的左上偏移,即中高频段幅值特性增大,这显然违背设计初衷相。而对于采取虚拟电阻控制电池变换器而言,电压环控制带宽的降低同样会使得中频段阻抗幅值特性向左上偏移,但较低的电池变换器控制带宽同样可以导致系统产生不必要的低频振荡,进而有可能使系统失去稳定性。
综上来看,增大虚拟电容控制下变流器的输出电容以及提升其相应的电压环控制带宽有利于实现功率的动态分配。减少虚拟电阻控制下变流器的输出电容以及降低其相应的电压环控制带宽,两者是以降低系统稳定裕度为代价的,并不建议在实际系统中加以采用。
4 仿真实验验证
为了验证船用混合储能系统分布式控制技术的有效性,本文利用仿真软件搭建了一套船用混合式储能系统分布控制技术仿真模型,系统框图如图5所示,各参数如表1所示。为了节省仿真计算资源,所设计的仿真系统仅包含两个混合式储能单元,但结果也足以说明本文所设计的分布式控制有效性及其参数特性等问题。
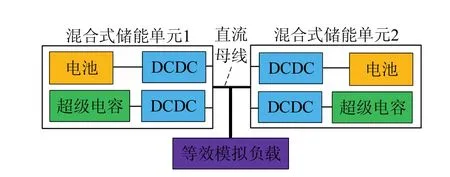
图5 仿真模型结构框图
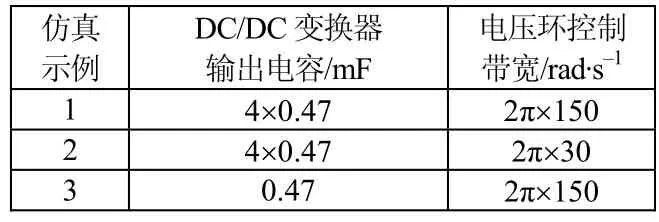
表1 混合式储能系统参数
4.1 分布式控制技术有效性仿真验证实验
图6给出的两个相同的混合式储能单元突加突卸恒功率负载的仿真结果曲线。从图中可以看出,当负载突然增加时,两个混合式储能单元中超级电容的输出电流瞬间增大,随后进入稳态逐渐减少至零;而电池的输出电流则是缓慢上升,并维持在一个常值以供给负载。同时,从图中也可以看到母线电压随着阶跃负载的引入而降低,随后缓慢回升。当负载电流突然减少为0时,混合式储能系统释放的能量将大于负载吸收的能量,超级电容则提供一个较大的瞬时负电流,相当于瞬间吸收掉多余的电能,电池的输出电流则缓慢下降至零,母线电压也随着负载的突然消失而出现短暂上升,其后通过电压恢复调节回路重新回到期望值上。图中同样给出了该混合式储能系统充电过程的工作特性仿真曲线,结果与前述的储能系统放电过程相似,采用船用混合储能系统分布式控制技术的超级电容仅吸收或释放瞬时功率,而电池仅吸收或释放平滑的稳态功率。
通过仿真结果可以看出,两个混合式储能单元在没有通信的条件下,通过本文提出的分布式下垂控制技术,实现了动态及稳态功率的比例分配。
4.2 混合式储能系统动态特性仿真实验
图7给出的是虚拟电容下垂控制提升动态特性仿真实验结果曲线对比图。图中的蓝色虚线在阶跃变化的恒功率条件下,采用传统下垂控制方法下的电池储能系统瞬时输出功率较大,这将会影响到电池短时间内过载,影响电池的使用寿命。并且直流母线电压波动较大,电网电能质量较低。在采用虚拟电容下垂控制技术的混合式储能系统中,超级电容吸收了瞬时功率,使得电池的输出功率上升斜率小,功率输出平缓,有利于延长电池的使用寿命。与此同时,母线电压波动也随之减少。
仿真实验验证了虚拟电容下垂控制技术的混合式储能系统有利于改善母线电压的动态响应特性,提升电网电能质量,延长电池使用寿命。
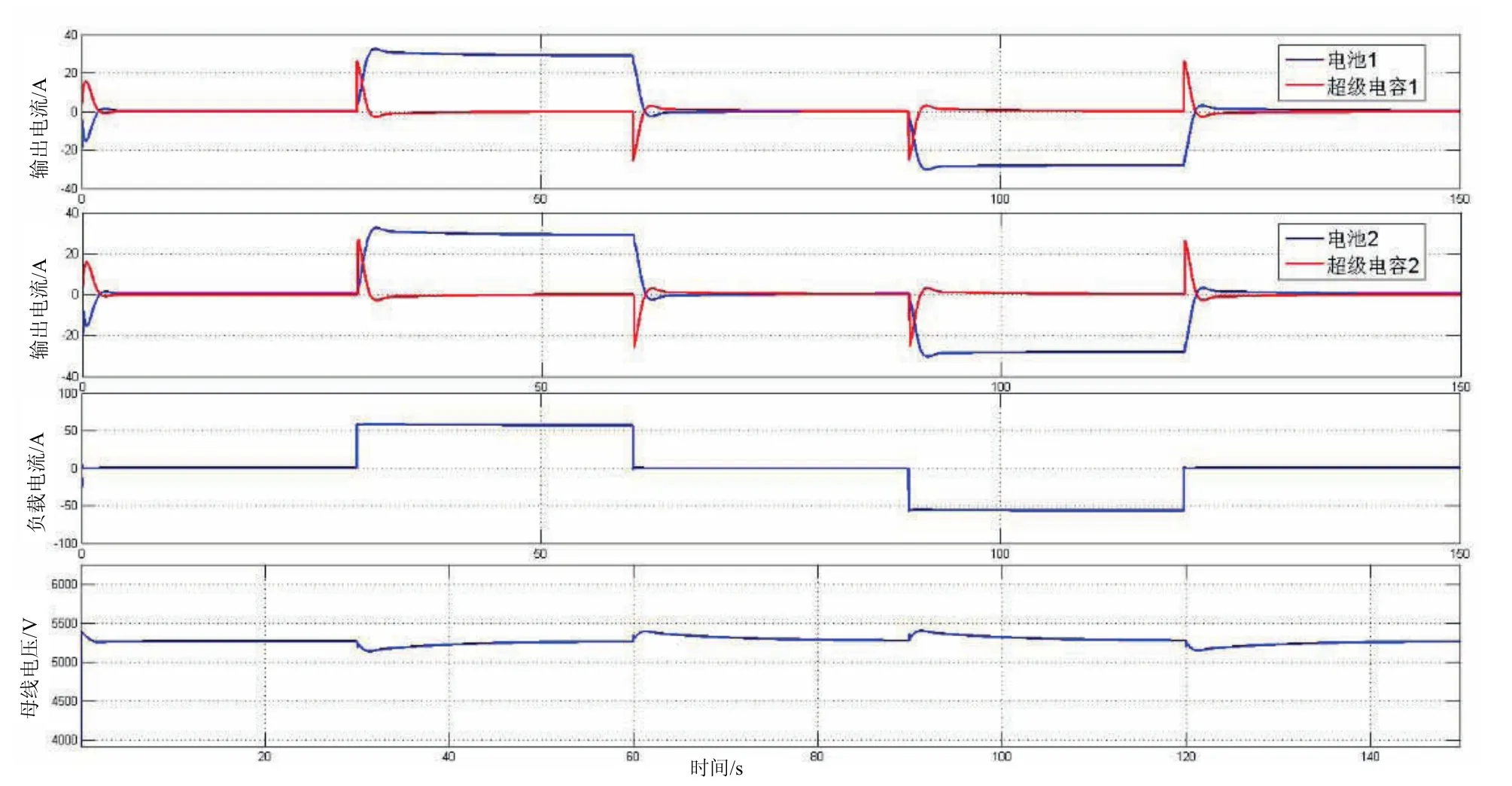
图6 混合式储能系统突加突卸恒功率负载仿真结果曲线
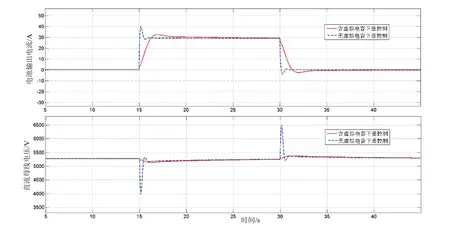
图7 动态响应特性对比曲线图
4.3 控制参数特性分析仿真验证实验
图8~10显示的是当超级电容DC/DC变换器参数发生变化时,混合式储能系统对负载阶跃变化的动态响应特性仿真结果。当超级电容 DC/DC变换器电压环控制带宽固定为100 Hz,而其输出电容选择为4×470 μF时,混合式储能系统动态响应特性曲线如图8所示。从图中可以看出,超级电容有效地提供和消耗了混合式储能系统中瞬时功率,而电池则输出稳态、平滑的电功率。
当超级电容DC/DC变换器输出电容减少到470 μF时,混合式储能系统对负载阶跃变化的动态响应特性仿真结果如图9所示。可以看出,超级电容和电池的输出电流已经发生了明显的畸变,电池的输出电流瞬时值甚至已经超过超级电容,且系统进入稳态过程时间较长。
当超级电容 DC/DC变换器电压环控制带宽减小到20 Hz时,混合式储能系统对负载阶跃变化的动态响应特性仿真结果如图10所示。从图中可以看出,当负载发生阶跃变化时,超级电容与电池的输出电流同时大幅度地快速上升,并没有达到预期的电池储能输出平滑稳态功率的目的。而且,该混合式储能系统进入稳态过程时间较长,期间超级电容甚至表现出过放的状态,系统动态响应特性也没有达到要求。
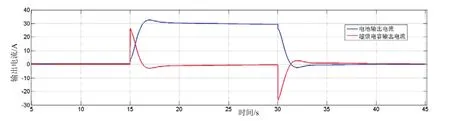
图8 DC/DC变换器理想参数下混合式储能单元输出电流动态响应特性
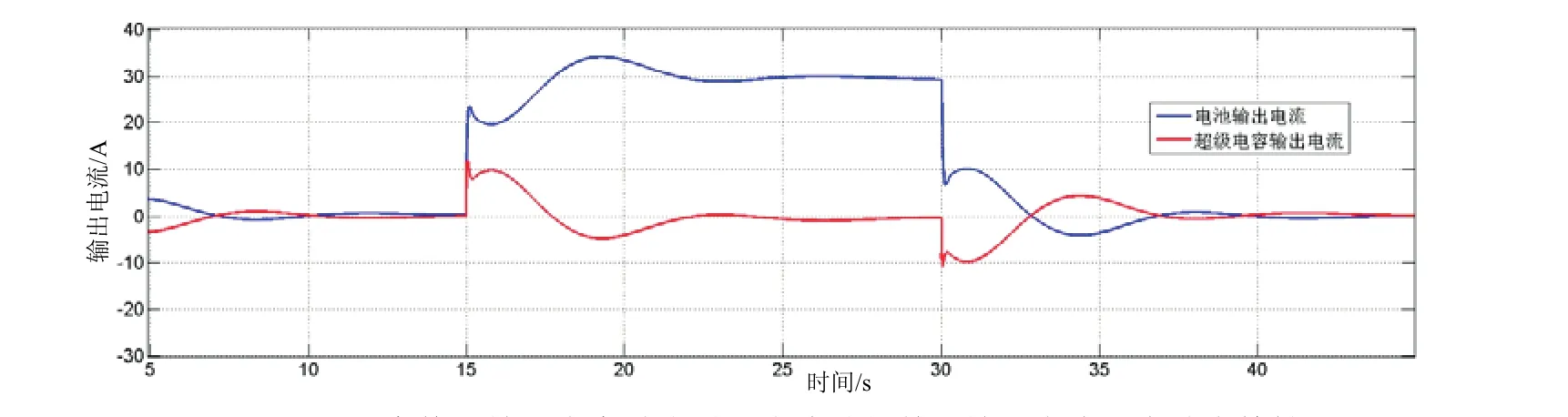
图9 DC/DC变换器输出电容减小时混合式储能单元输出电流动态响应特性
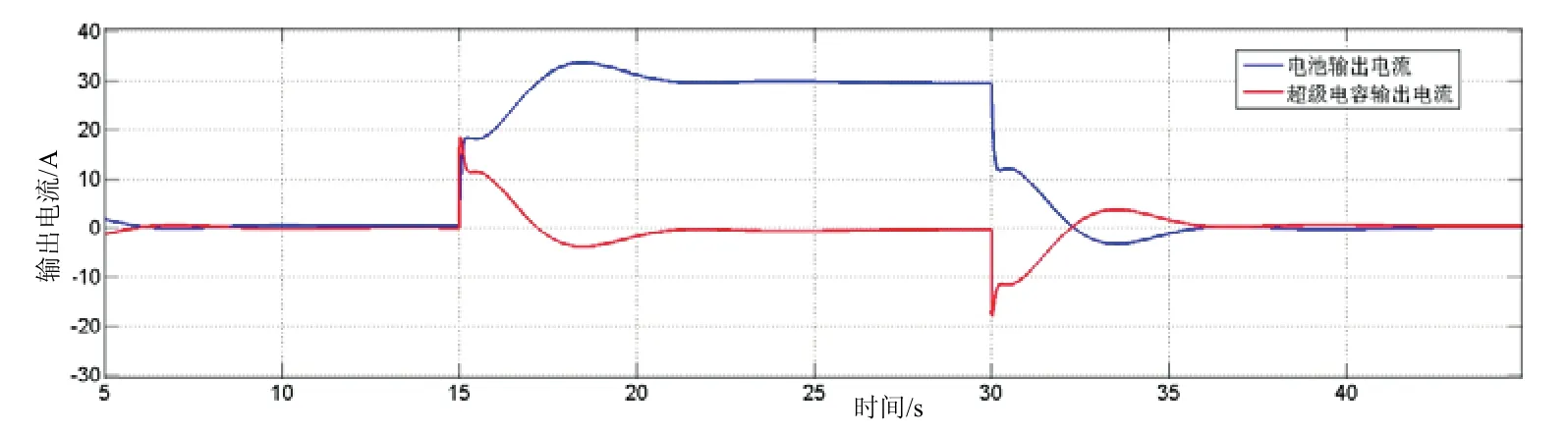
图10 DC/DC变换器电压环控制带宽减小时混合式储能单元输出电流动态响应特性
仿真实验结果进一步验证了上一节中有关电压环控制带宽及输出电容参数的影响分析,即较低的超级电容变换器电压环控制带宽和较小的输出电容均不利于实现功率的动态分配,同时也会对混合式储能系统的分布式控制的动态特性造成不良影响。
5 总结
本文提出了一种船用混合储能系统分布式控制技术。通过将高功率密度的超级电容储能单元与高能量密度的电池储能单元经由 DC/DC变换器并联组合,构成混合式储能系统,解决了单一储能介质无法兼顾船用储能系统高功率密度及高能量密度需求的难题。采用虚拟电阻下垂方法控制电池储能单元实现其功率的平滑稳态输出,采用虚拟电容下垂方法控制超级电容储能单元实现其对暂态功率失衡的快速响应。文中给出了具体的船用混合式储能系统分布式控制器结构及其参数设计方法,并着重分析了超级电容电压环控制带宽及输出电容对系统输出电流动态响应特性的影响。设计了船用混合式储能系统仿真程序,验证了船用混合储能系统分布式控制技术的有效性及控制器参数影响分析的正确性。
参考文献:
[1] LIU S, ZHU W, CHENG Y, et al. Modeling and smallsignal stability analysis of an islanded DC microgrid with dynamic loads[C]. IEEE, International Conference on Environment and Electrical Engineering, 2015:866-871.
[2] KULKARNI SAURABH, SANTOSO S. Impact of pulse loads on electric ship power system: With and without flywheel energy storage systems[C]. IEEE Electric Ship Technologies Symposium, 2009:568-573.
[3] DOUGAL R A, LIU SHENGYI,WHITE RALPH E. Power and life extension of battery-ultracapacitor hybrids[J].Components and Packaging Technologies IEEE Transactions on, 2002,25(1):120-131.
[4] STEIGERWALD ROBERT L, DONCKER RIK W DE,KHERALUWALA MUSTANSIR H. Comparison of high-power DC-DC soft-switched converter topologies[J].Industry Applications IEEE Transactions on,1996,32(5):1139-1145
[5] ZAHEDI BIJAN, NORUM LARS E. Modeling and simulation of all-electric ships with low-voltage DC hybrid power systems[J].IEEE Transactions on power Electronics , 2013, 28(10):4525-4537.
猜你喜欢
煤气与热力(2021年6期)2021-07-28 07:21:24
测控技术(2018年2期)2018-12-09 09:00:56
通信电源技术(2018年3期)2018-06-26 06:33:42
能源(2017年12期)2018-01-31 01:42:59
现代工业经济和信息化(2016年8期)2016-05-17 05:37:35
电测与仪表(2016年24期)2016-04-12 00:20:58
电测与仪表(2016年6期)2016-04-11 12:07:58
电源技术(2016年2期)2016-02-27 09:05:08
西部广播电视(2015年10期)2016-01-18 03:46:14
电测与仪表(2015年19期)2015-04-09 11:32:58
