
铁路电力机车节能优化操纵研究
2018-04-27 08:22:30高志远
铁道运输与经济 2018年4期
高志远
GAO Zhi-yuan
(中国铁道科学研究院集团有限公司 运输及经济研究所,北京 100081)
(Transportation & Economics Research Institute, China Academy of Railway Sciences Corporation Limited, Beijing 100081, China)
0 引言
能源和环保问题越来越受到社会的广泛关注,轨道交通绿色、安全的优势日益凸显,特别是对于电力机车,其具有自动化程度高、噪声低、运量大、污染小、安全性高等优点。电力机车牵引能耗在机车能耗中所占比例最大,为 65%~80% 左右[1]。因此,降低电力机车牵引能耗是机车节能的重点工作。在降低机车牵引能耗方面,包括线路和车辆设计、牵引传动优化、驾驶策略改进和辅助驾驶等方面,而线路、车辆设计和牵引传动优化涉及周期长,并且大部分属于基础设施方面的改进,成本较大,而驾驶策略优化在一定的线路、机车和车辆条件下,通过优化机车目标速度曲线可以降低机车牵引能耗,是实现机车节能的一种有效途径据,并且节能效果显著。根据国际铁路联盟组织(UIC) 报告,以及西南交通大学相关研究成果,通过优化机车驾驶,瑞典货运铁路实现节能的幅度为20%~25%,美国通用电气公司 (GE) 的内燃机车可实现节能的幅度为 3%~17%,澳洲货物机车可以实现节能的幅度为 3%~15%。
国内外学者对机车节能优化操纵进行了大量的研究,特别是在目标速度曲线优化方面,有数学方法、智能算法及其他一些方法[2]。Liu 等[3]利用极大值原理结合机车的运动方程,给出了机车最优的驾驶策略,并结合特定的线路数据、机车参数和其他外部条件优化机车驾驶。Albrecht 等[4]利用极大值原理证明了在线路陡坡区段机车优化策略的惟一性,包括全局最优和陡坡区段的切换点惟一,并利用仿真手段对平直道机车的优化驾驶进行了模拟。Chang 等[5]综合考虑了机车的多目标约束,包括正点、舒适、节能,利用遗传算法对机车节能问题进行了研究,得到机车的最佳控制点。Cucala[6]和Domigueza[7]综合运用遗传算法和粒子群算法,基于时刻表优化和节能驾驶的角度对机车节能问题进行了研究,利用模糊线性规划算法对机车节能问题进行求解。王烈等[8]列出了机车能耗的影响因素,在满足机车安全、准点、舒适等多目标约束下利用极大值原理求解了机车节能算法,并将驾驶策略进行了实车验证,取得了良好的节能效果。张勇等[9]以内燃机车为研究对象,采用系统辨识的方法建立内燃机的电传动模型,对不同内燃机车的优化操纵进行了研究。曹晓云[10]以神华铁路为研究对象,对神华铁路机车节能优化驾驶进行了研究。
从以上研究可以看出,极大值原理、动态规划等数学方法具有严格的数学推导过程,能保证解的惟一性,但对复杂约束和多目标优化问题求解较为困难,在具体应用时需要进行简化;遗传算法、粒子群算法等计算智能面对机车的复杂运动过程和多目标约束不需要建立具体的数学模型,但搜索的随机性和目标曲线波动性交大,最优性无法保证。因此,单一采用某种算法并不能达到节能的目标,利用计算机工具将多种方法组合使用能够互相借鉴,达到电力机车安全、节能等多目标约束的效果。
1 多目标约束下的电力机车节能模型构建
1.1 问题描述
一般的,电力机车的运行过程可视为以下 4 个阶段或环节的组合:启动阶段、恒速 (准恒速) 运行阶段、惰行阶段、制动阶段。但是,在电力机车实际运行过程中,受多种工况的影响,运行过程要复杂得多。电力机车运行过程如图 1 所示。从图 1 可以看出,电力机车的运行过程特别是货物电力机车是一个典型的非线性、多约束的复杂过程,现有的数学模型只能对实际情况进行相似或大概的模拟,对电力机车复杂运行过程不能完全描述。对于我国铁路而言,交路长、线路条件复杂、客货混跑、密度大,很多节能运行算法并不能达到节能目的。但是,根据实际调研和添乘的情况来看,有些经验丰富的司机乘务员能够根据实际路况对各种不同复杂的工况进行处理,经验丰富的司机在驾驶同一电力机车在同一交路情况下,平均节能幅度高达20% 左右,而经验丰富的司机乘务员的操纵行为正是节能算法所不能解决的。因此,研究试图利用电力机车节能优化驾驶算法与优秀司机经验相结合,对多目标约束下的电力机车节能进行求解。
1.2 构建模型
极大值原理作为优化方法中较为经典的数学模型,具有严谨的数学推导过程,并且也是电力机车节能算法中引用最多、最为成熟的方法,而且其最优性和解的惟一性已经被证明存在,研究将采用极大值原理作为求解电力机车节能的最优化算法。
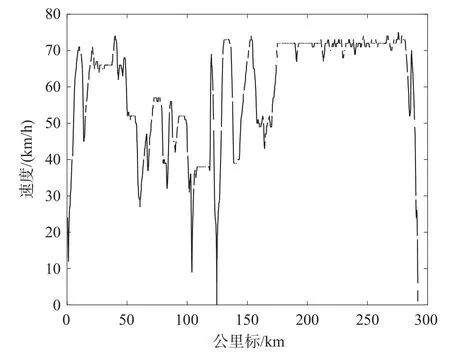
图 1 电力机车运行过程Fig.1 Operation of electric locomotives
电力机车在运行过程中受到不同力的作用,总体来看,主要有电力机车牵引力、制动力、基本阻力和附加阻力,根据牛顿第二定律,电力机车运动模型的数学描述如下。

式中:v为电力机车运行速度,v≤V(x),V(x) 为电力机车限速;uf为电力机车牵引力系数,0≤uf<1;f(v) 为电力机车最大牵引力;ub为电力机车制动系数,0<ub<1;b(v) 为电力机车最大制动力;r(v) 为电力机车基本阻力;g(x) 为电力机车附加阻力,指坡道等重力分量;x为电力机车行驶的距离。
根据电力机车能耗公式,在保证安全、准点前提下的能耗J最小,那么电力机车能耗J计算公式为

1.3 节能最优工况
根据庞特里亚金极大值原理,对电力机车的节能问题进行求解,可以得到 5 个优化控制方式,不同运行阶段的电力机车节能运行控制模式如表 1 所示。
1.4 节能最优工况之间切换
设α(x) 为目标速度,v(x) 为电力机车现行运行速度,引入一个辅助变量θ,令ξ与η分别是电力机车进行工况转换的公里标,则有
(1)当θ>1 时,目标速度α(x)>v(x),应当在ξ处采用全牵引力牵引,制动力为 0,在η处达到目标速度。
(2)当θ= 1 时,目标速度α(x)=v(x),应当在ξ处采用部分牵引力牵引,制动力为 0,在ξ与η之间匀速运行。
(3)当 0<θ<1 时,目标速度α(x)<v(x),应当在ξ处采取惰行模式,牵引力和制动力都为 0,在η处达到目标速度。
(4)当θ= 0 时,目标速度α(x)= 0,应当在ξ处采取部分制动模式,牵引力为 0,在η处停车。
(5)当θ<0 时,目标速度α(x)<0,应当在ξ处采取最大制动模式,牵引力为 0,使电力机车在最短时间内停车。
1.5 坡道的划分
根据线路坡道特点,将坡道划分为平直区段、缓坡区段和陡下坡区段,不同的区段电力机车合力表现不同。
(1)平直区段。平直区段是指坡道为 0 的路段,电力机车使用牵引工况使电力机车保持匀速运行的区段,满足uf f(v)-r(v) = 0。

表 1 不同运行阶段的电力机车节能运行控制模式Tab.1 Energy control strategies at different stages of operation
(2)缓坡区段。缓坡区段是指电力机车使用惰行工况使电力机车能保持目标速度运行的区段,满足g(x)-r(v) = 0。
(3)陡下坡区段。陡下坡区段是指电力机车使用惰行工况不能使电力机车保持目标速度运行的区段,甚至会超过区段限速,满足g(x)-r(v)>0。
1.6 陡下坡区段处理和优秀司机经验借鉴
在平直区段和缓坡区段,对于驱动系统效率稳定的电力机车,其不同工况之间的转换完全相同,但对于陡坡区段,即使电力机车采用惰行模式,仍然会超出目标速度,甚至会超出线路限速,影响电力机车运行安全。而电力机车司机大部分都是固定交路,在实际驾驶中积累了大量成熟经验[11],在某些惰行路段部分优秀司机能够弥补算法的不足,定性描述如下。①起车稳:在电力机车开始运行时,以较低的速度起步,当各个车辆之间的车钩完全被拉开,再进行加速运行。②加速快:在电力机车完全启动后,进行最大牵引力进行加速,使电力机车在较短的时间内达到目标速度。③制动快:在电力机车安全范围内,使用最大制动力进行减速,使电力机车在较短的时间内停车。④操纵平稳:在电力机车运行过程中,避免多次加减速,通过对路况的判断,提前进行加减速。
对于陡坡的处理,优秀司机往往提前进行减速惰行,以减少电力机车制动次数。为了对此进行定量化描述,借鉴对于陡上坡采取的平均速度等效法的思路[9],对陡下坡采取提前惰行的方式处理,陡下坡的处理如图 2 所示。从图 2 可知,电力机车运行速度曲线满足

从图 2 可以看出,电力机车在hq区段存在陡下坡,假如电力机车从p点开始惰行,然后电力机车减速运行,在陡坡阶段加速运行,如果不采取制动措施,那么电力机车的速度会超过目标速度,到q点恢复惰行前的匀速,但电力机车在陡下坡速度会高于线路限速,会对行车安全造成很大的影响。假如电力机车从h点开始惰行,然后在下坡阶段进行加速运行,在s点恢复匀速行驶。

图 2 陡下坡的处理Fig.2 Managing a steeply downhill scenario
2 算例分析
以 HXD1机型为仿真对象建立模型,HXD1机型特征描述如表 2 所示。为体现节能算法的有效性,以及多种坡道与限速结合的特征,特选取某段的实际路线为试验线路,试验限速假设为 80 km/h,不同操纵方式比较如图 3 所示,不同操纵方式对应的能耗如表 3 所示,对于比较简单的路线,该节能算法同样适用。
从图 3 可以看出,在恒速运行情况下,电力机车加速阶段用最大牵引力运行,电力机车在公里标12 + 320 处达到电力机车目标速度,用时为5 min 50 s,然后一直恒速运行至停车。在节能运行模式下,电力机车达到目标速度过程与恒速模式相同,在公里标 14 + 080 处开始惰行,此处有连续下坡,然后至公里标 22 + 197 处结束惰行,面临 3‰上坡,加速至公里标 22.623 处开始惰行,面临 6‰和 12‰ 的长达下坡,在公里标 25 + 491 处触碰限速值,开始使用制动力维持限速,在公里标 25 + 443处继续惰行,然后在公里标 28 + 874 处结束惰行,继续匀速行驶至公里标 42.558 处面临约 2 000 m 2 ‰左右的下坡,在公里标 44 + 559 处结束惰行,然后进琉璃河站。在节能加经验运行模式下,采用电力机车运行速度曲线公式,在长大下坡前提前惰行,避免了电力机车制动过程,并且课题组通过观察电力机车受力情况,模拟优秀司机成熟经验,增加了公里标 38 + 535 到公里标 40 + 100 之间的节能惰行。

表 2 HXD1 机型特征描述Tab.2 Description of HXD1 model.

图 3 不同操纵方式比较Fig.3 Comparison of different operating methods
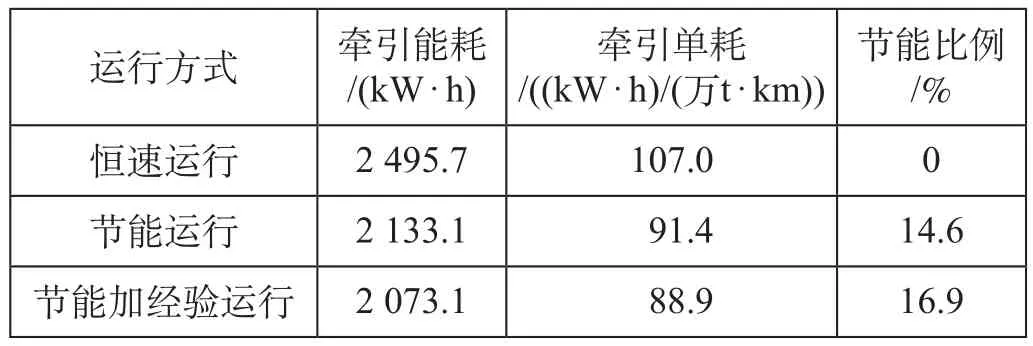
表 3 不同操纵方式对应的能耗Tab.3 Energy consumption of different operating methods
从表 3 可以看出,节能运行模式在 1 min 的时间情况下可节省 14.58% 的能耗,在 1 min 30 s 的时间情况下可节省 16.9% 的能耗,并且减少了司机乘务员的制动过程,节能效果明显。
3 结论
以电力机车节能为目标,通过利用极大值原理分析电力机车不同运行阶段的节能模式,再编制算法对不同运行阶段的转换点进行了求解,并结合实际添乘中的经验,利用理论方法对司机经验进行定量化的描述,最后利用 HXD1电力机车进行了仿真验证。
(1)分析电力机车最优节能操纵。在分析电力机车受力和运行阶段基础上,构建使电力机车能耗最小的数学模型,得到电力机车各个运行阶段能耗最小的模式,并编制相关算法对不同阶段的转换点进行求解。
(2)利用实际线路对节能算法进行仿真。利用 matlab 软件在实际线路上进行仿真研究,从仿真结果来看,节能效果显著,对电力机车的辅助驾驶模式提供参考。
参考文献:
[1]周新军. 我国铁路能源消耗和节能现状[J]. 中外能源,2009,14(3):87-92.ZHOU Xin-jun. Present Situation of Chinese Railway Energy Consumption and Conservation[J]. Sino-Global Energy,2009,14(3):87-92.
[2]杨 杰,贾利民,卢少锋,等. 电力牵引货运列车节能运行研究 (一):目标速度曲线优化[J]. 铁道学报,2016,38(4):22-31.YANG Jie,JIA Li-min,LU Shao-feng,et al. Energy-Efficient Operation of Electric Freight Trains-Part I:Speed Profile Optimization[J]. Journal of the China Railway Society,2016,38(4):22-31.
[3]LIU R,GOLOVICHER I. Energy-Efficient Operation of Rail Vehicles[J]. Journal of Transport Geography,2003,37(10):91-93.
[4]ALBRECHT A,HEWLEET P,PUDNEY P. Energy-Efficient Train Control from Local Convexity to Local Optimization and Uniqueness[J]. Energy Policy,2013,49(10):3072-3078.
[5]CHANG C S,SIM S. Optimizing Train Movements Through Coast Control Using Genetic Algorithms[J]. Electric Power Applications,1997,144(1):65-73.
[6]CUCALA A. Fuzzy Optimal Schedule of High Speed Train Operation to Minimize Energy Consumption with Uncertain Delays and Driver’s Behavioral[J]. Electric Power Application,2012,25(2):1548-1557.
[7]DOMIGUEZA M. Multi Objective Particle Swarm Optimization Algorithm for the Design of Efficient ATO Speed Profiles in Metro Lines[J]. Engineering Applications of Artificial Intelligence,2014,29(7):43-53.
[8]王 烈,王 鹏,胡齐芽,等. 基于多目标约束的机车驾
( )( )驶策略优化研究[J]. 铁道运输与经济,2016,38(2):87-92.WANG Lie,WANG Peng,HU Qi-ya,et al. Study On Optimization of Locomotive Driving Strategy based on Multiobjective Constrains[J]. Railway Transport and Economy,2016,38(2):87-92.
[9]张 勇,谭南林. 基于电传动模型的机车优化操纵方法研究[J]. 控制工程,2012,19(S1):52-55.ZHANG Yong,TAN Nan-lin. Research on Optimal Manipulation Method of Locomotive based on Electric Drive Model[J]. Control Engineering of China,2012,19(S1):52-55.
[10]曹晓云. 神华铁路大物流发展对策研究[J]. 铁道货运,2017,35(10):29-34.CAO Xiao-yun. Study on the Solution for Developing Comprehensive Logistics for Shenhua Railway[J]. Railway Freight Transport,2017,35(10):29-34.
[11]杨 杰. 货运列车节能运行优化与智能控制方法[D]. 北京:北京交通大学,2017.
猜你喜欢
文萃报·周二版(2022年23期)2022-06-11 20:55:46
云南画报(2021年11期)2022-01-18 03:15:34
减速顶与调速技术(2021年3期)2021-03-09 03:14:56
中国交通信息化(2019年9期)2019-11-16 09:22:38
铁道通信信号(2018年8期)2018-11-10 05:15:42
铁道通信信号(2018年8期)2018-11-10 05:15:38
中国交通信息化(2017年6期)2017-06-06 07:18:25
小学生导刊(2017年14期)2017-05-17 05:43:53
铁道通信信号(2016年4期)2016-06-01 12:10:19
西藏科技(2015年10期)2015-09-26 12:10:27
