适用于渤海海域浮式核电平台水动力特性研究基础与展望
2018-04-27 07:11孙雷罗贤成姜胜超刘昌凤
装备环境工程 2018年4期
孙雷,罗贤成,姜胜超,刘昌凤
(1.大连理工大学 船舶工程学院,辽宁 大连 116024;2.高新船舶与深海开发装备协同创新中心,上海200240;3.大连海洋大学 海洋与土木工程学院,辽宁 大连 116023)
近些年我国大力发展海洋产业,一些对海洋的开 发活动日益频繁,对海上用电需求激增(仅渤海钻井平台的能源需求将达到1000 MW)。国家大力实施海洋发展战略,大力开发一些岛礁,而对于这些岛屿的开发工作迫切需要稳定和经济的能源支持。针对这一系列问题,海上浮动核电站被认定为近期唯一的彻底解决方案。海上浮式核电站系统主要包括船舶工程系统与核反应堆系统。海上浮式核电站可为岛屿开发、海上油气田开采、偏远地区供电供热、海水淡化、核能制冷等提供能源支持。由于安全性好(远离陆地、海水天然热阱)、电能转化率高(采用核能)、抗震性能强(浮于水面)、经济价值高(市场规模逾1000亿元)、清洁环保(无碳排放)等,被称为是未来最可行、最有利的海上供电工具[1]。
1 浮式核电平台概述
海上核电站的概念最初由美国提出,并逐渐被世界各国所采纳。1963年,美国军方为巴拿马运河区供电,将MH-1A核电装置设在“自由号”船舶上。1972年,美国西屋电力公司提出将反应堆放置在大型驳船上,由拖船拖拽的“离岸”型核电站设想,为大西洋沿岸供电。随后麻省理工学院开发了浮动甲板式海上核电站,该核电站为圆筒FPSO(浮式生产储油卸油装置)外形,核反应堆布置在圆筒形舱室内部,平台采用多点系泊方式,可作业于深海海域,如图1所示[2]。近年来,法国研制了下沉式海洋核电站Flexblue,该核电站核反应堆沉降在海底,采用远程控制技术进行控制,与岸上电网通过海底电缆相连,移位需要水面船舰辅助,如图2所示。韩国设计了GBS式浮动核电站,通过混凝土结构作基础降低风险,该核电站继承了陆地核电站和浮动核电站的优势,既能降低海洋环境载荷对平台影响,又能有效减小地震引发的影响,但仍然无法避免海啸对其影响,如图3所示[3]。2016年 7月,俄罗斯研发的世界上首座海上浮动核电站“罗蒙诺索夫院士号”进入下海测试阶段,并计划于2017年末正式服役。2016年初,国家发改委批准了中船重工“国家能源重大科技创新工程海洋核动力平台示范工程”项目立项,目标是实现我国海洋核动力平台“零”的突破,并结合我国海洋条件的具体情况,提出了以我国渤海近海FPSO为母型的软刚臂系泊式浮动核电站[4],如图4所示。
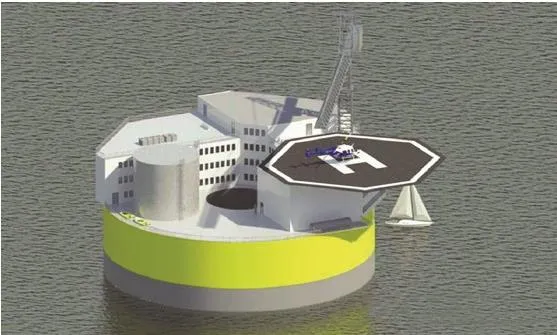
图1 MIT圆筒形浮式核电站

图2 法国Flexblue沉式核电站

图3 韩国GBS浮式核电站
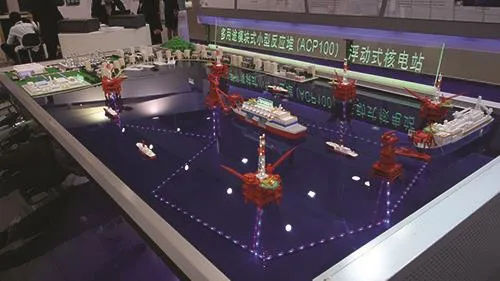
图4 中国软刚臂系泊式浮动核电站
2 浮式核电平台初步探讨研究
相较于传统发电方式,核电具有消耗资源少、环境影响力小和供应能力强等优点,成为目前主要的电力供应支柱。相对于陆地核电站发电方式,采取浮式核电平台设计具体以下几点优势。
1)海上核电站的海域适用性广。因为核电站在运行过程中会产生巨大能量,所以核电站的选址一般要求靠近水源,最好是靠海,而海上核电站在选址上没有过多要求,利用现有的海洋平台设计经验,完全可以实现在风暴中安全自存。海上浮式核电站可以利用其敏捷的移动性,对一些电力难以抵达的地方提供稳定强大的电力供应。
2)海上核电站可以在船厂的船坞里建造。可以降低建造成本与时间,促进海工装备的发展,同时也可以为核动力船舶的建造积累经验。
3)海上核电站有利于促进核电产业出口。海上核电站利用其广泛的海域适应性与灵活的移动性,可以通过出售或租赁的方式扩展核电产业的国际市场。
4)发展海上核电站有利于提高我国水面舰艇核动力装置研发水平。
5)海上核电站还有望利用海水淡化缓解人类淡水危机问题。
尽管海洋核动力平台建立的目的是生产清洁能源,减轻环境污染,但是海洋核动力平台本身却具有一定的安全隐患。主要表现在遇到极端海况时,如果平台发生事故,高温的核心就会烙化底层,穿透驳船落入水中,造成严重的海洋污染。这种污染造成的危害往往是巨大的,难以补救[5-6]。
对于陆地上的核电站,我国已有行业规范、国家标准以及较为完备的法律法规体系,而对于海洋核电平台,国内尚未有相关的规范要求。因此,现有的研究基础都是基于《IMO核动力商船安全规范》、《国际船舶装运密封装置辐射性核燃料、环保强放射性废料规则》以及《CCS海上浮式装置入级与建造规范》等相关规范要求进行研究设计的。浮式海洋核电平台的安全性要求应贯穿其设计、建造、作业、报废的全寿命周期之中,除了满足核反应堆自身安全,还要考虑载体平台系统的安全性、适应性以及成熟性等要求。载体的总体布置、破舱稳性、堆舱通风、救生消防、防火分舱以及备用急用电源等都需要作为设计的重点。参考规范要求,海洋核电平台对平台载体具有以下要求:应将核反应堆装置布置在船舶水线以下,以满足核反应堆安全性要求;核反应堆装置布置空间应满足封闭性要求;作为载体的平台应具有相当的强度以满足抵抗极端载荷作用,载体寿命应与核反应堆装置相当;载体要满足渤海海域环境要求,其运动响应和加速度等不得超过核反应堆装置的极限要求;便于核反应堆装置进行维修处理与换料。
参考我国新颁布的核动力厂设计规定中[7],明确要求对核反应堆损坏概念分析须综合考虑确定论和概率论的方法。根据概率安全分析,目前核电站现有的二代型或二代改进型的核反应堆发生堆芯严重损坏事故的概率低于1×10-4/(堆·年),发生严重的放射性向环境释放的概率低于1×10-5/(堆·年),这点已成共识。对于海洋浮式核电平台,首先必须保证其安全性,为确保海洋核电平台在恶劣极端海况下(百年一遇、万年一遇的海况)的结构安全,必须开展海洋核电平台船型方案和系泊方式的风浪流模型试验,供设计方提出合理的船型和系泊方案,为海洋核电平台的设计提供依据。
在对核电平台进行模型试验的研究过程中发现,对平台采用万年一遇的海况标准(远超海工百年一遇的标准)进行风浪流水池实验时,核电平台的系泊力及运动响应与风浪流同向时最为不利,这与以往风浪流成一定夹角出现极值的认识[8]不符。在风浪流同向共同作用下的系泊力及运动响应明显小于波浪单独作用情况,这与使用目前的商业软件AQWA,SESAM等进行数值计算结果完全相反。软刚臂的动态响应特性也凸显出来,系泊系统在平台大幅度运动时刚度有明显下降的现象。这些问题的根源在于极端海况下软刚臂系泊浮式平台的水动力特性及机理不明,并缺乏有效的预报手段。由于海况重现期标准的提高,核电平台的运动特性由量变引发了质变,体现出了更强的时变性和非线性,而船级社承认的商用软件目前大多是采用频域线性方法,预报能力不足,这无疑将对海洋核电站的实际使用产生巨大的风险。海上核电站的核心问题是安全性,对浮动基础稳定性的限制更加严刻,因此,必将对浮式平台的水动力性能的评估和预报提出更高要求。
为探究极端海况下的浮式海洋核电平台运动性能,针对作业于渤海海域的浮式海洋核电平台作业海况进行了调研论证,采用推算方法对极端海况进行了模拟计算。
2.1 浮式核电平台作业海况研究
渤海海域是一个近封闭的内海,地处中国大陆东部的最北端,具体位置在北纬 37°07′~41°0′、东经117°35′~121°10′,面积为 77 000 km2,平均深度为18 m。渤海周围有三个主要海湾:北面的辽东湾、西面的渤海湾、南面的莱州湾(如图5所示)。渤海以风浪为主,随季风的交替具有明显的季节性。10月至翌年 4月盛行偏北浪,6~9月盛行偏南浪。渤海风浪以冬季为最盛,波高通常为0.8~0.9 m,周期多半小于5 s。1月平均波高为1.1~1.7 m,寒潮侵袭时可达3.5~6.0 m。夏秋之间,偶有大于6.0 m的台风浪。海浪以渤海海峡和中部为最大,辽东湾和渤海湾较小。渤海的平均波高多为0.1~0.7 m,以海峡区最大,平均为0.8~1.9 m。渤海潮流以半日潮流为主,流速一般为0.5~1 m/s,最强潮流见于老铁山水道附近,达1.5~2 m/s,辽东湾次之,为1 m/s左右。最弱潮流区是莱州湾,流速为0.5 m/s左右。冬季,渤海由于强寒潮频繁侵袭而出现结冰现象,冰期约为3个多月,常见冰厚为0.1~0.4 m。
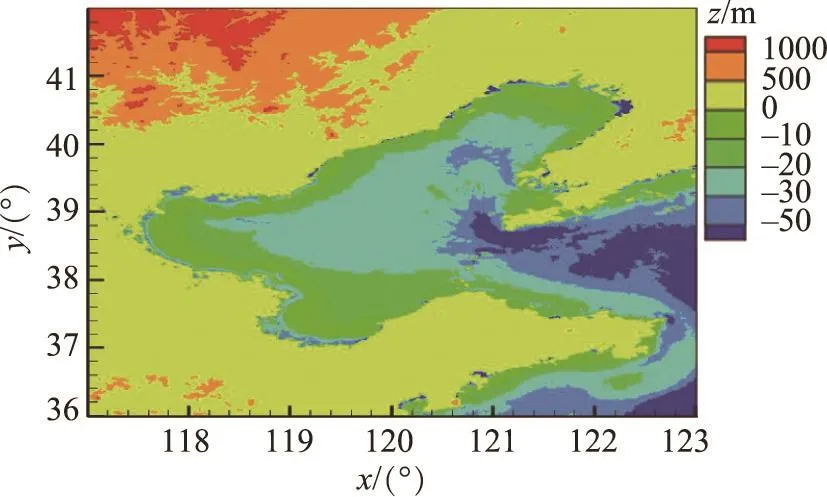
图5 渤海海域海底地形
通过对渤海海域实测资料分析,采用矩方法推算满足万年一遇极端海况下的波浪、海流、风速以及海冰的极值。基本思想为:认为波高、潮流、风流、海冰等值的分布服从三参数韦布尔分布,通过使分布的各阶矩和样本的各阶矩相等,从而得到分布参数的估计。推算得到的各环境参数见表1—表5:

表1 不同重现期波高周期极值
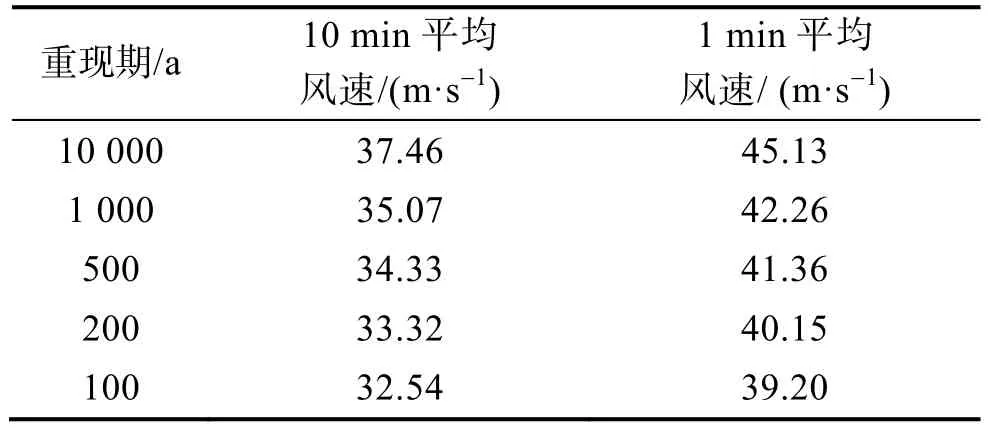
表2 不同重现期风速极值
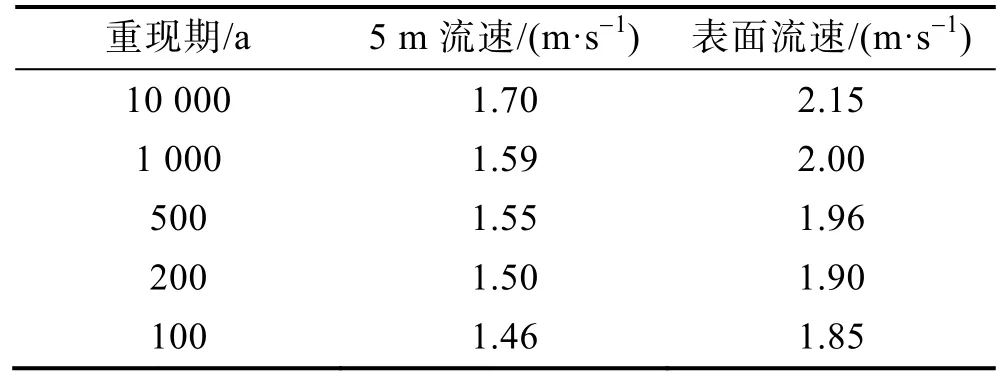
表3 不同重现期的5 m流速和表面流速极值
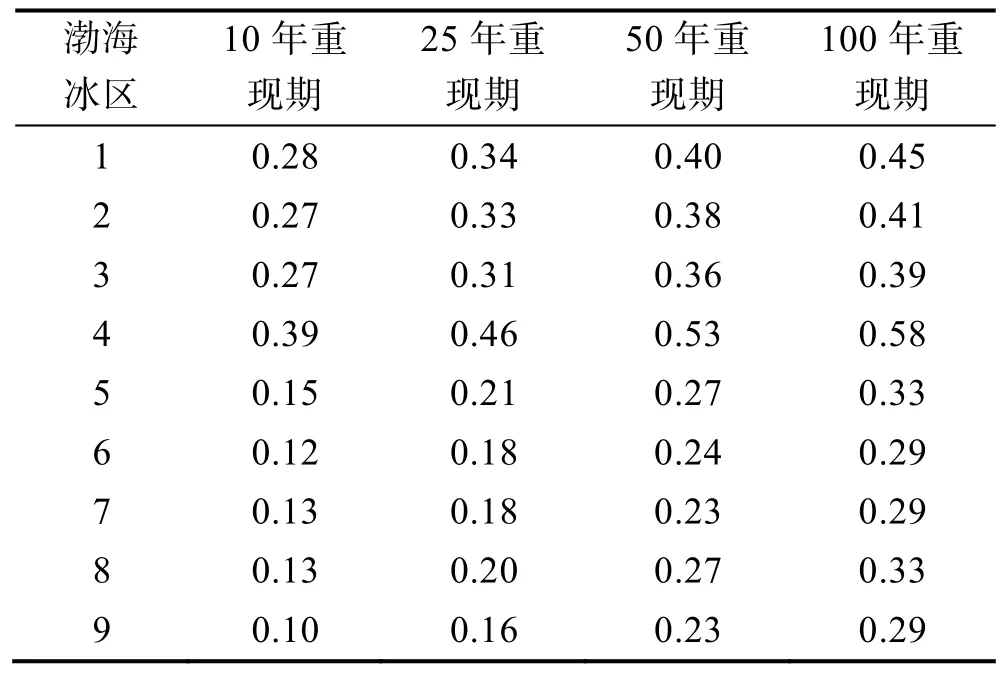
表4 不同重现期平整冰厚度 m
渤海各区的海冰极值分布如图6所示,表4和表5为不同重现期时的平整冰与重叠冰的厚度。

表5 不同重现期平整冰厚度 m
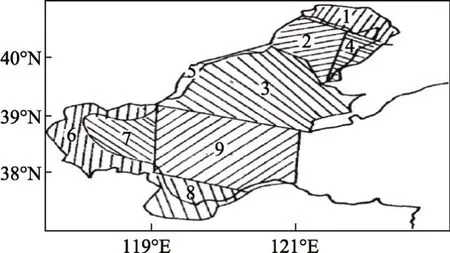
图6 渤海各区海冰分布区
2.2 浮式核电平台选型研究
海洋核电平台系统主要是由船舶系统与核反应堆系统组成,而船舶系统主要包括核电平台系统和系泊系统。核电平台系统将针对不同海域情况选取不同类型的平台。适用于浅海海域的平台类型包括有自升式、座底式和混凝土式、导管架(立柱式)等。其中,自升式平台是一种利用自身升降装置将平台桩腿插入海底下的可移动式钻井平台,一般用于浅海海域[9]。座底式和混凝土式平台亦称为钻驳或插桩钻驳,该平台适用水深较浅,水深一般小于30 m以下,该装置在指定作业区域将沉垫内灌水着落,并达到稳定状态[10]。对该平台的结构和稳性方面而言,水深有限并且受到海底条件影响较大,因此不适于作为参考平台。导管架式平台亦称为桩式平台,其作业水深通常小于300 m,该装置采用打桩方式将桩腿固定在海底,由桩腿来支撑平台,并且抵抗风浪流等环境力,它是目前浅海海域通用的平台形式[11]。适用于深海海域的平台类型包括有半潜式、SPAR、张力腿、船型等。
半潜式平台水线面很小,具有较大的固有周期,与波频共振的可能性低,运动响应小,浮体位于水面以下,波浪作用力小,一般采用悬链线锚泊方式[12]。半潜式平台具有相对总投资小,更大甲板空间和甲板可变载荷、无需海上安装、全球全天候的工作能力和自存能力的优势。但在恶劣海况下的运动幅度较大、结构安全性有待进一步提高。
Spar平台共形成了四种典型结构,发展历程分别是第一代经典式Spar平台(classic spar)、第二代桁架式Spar平台(truss spar)、第三代多柱式Spar平台(cell spar)和新型 Spar平台(minDoc spar)[13]。Spar平台适应于深海海况,在深海海况下运动性能良好,安全性能较高,灵活性优于张力腿平台,且造价不会随着水深的增加而急剧提高。Spar平台由于吃水很大,移位不便,平台中部结构时刻处于受拉伸状态,对平台结构安全有不利影响,细长直立的圆柱外形,不便于发电设备的布置,主体部分有可能发生涡激运动。
张力腿平台承受的浮力远大于自身的重力,多余的浮力依靠张力腿产生的张力来平衡。张力腿平台运动性能良好,抗恶劣环境作用能力强,造价相对于固定式平台较低[14]。当工作水深超过1200 m以上的海域时,由于张力腿自身重量较大,张力腿的张力腱运动达到极限,受力发生较大改变,导致张力腿平台定位性能较差。另外由于差频波浪力将引起平台纵荡、横荡、艏摇三个自由度的共振现象,称为Spring现象。同时风的激振力也会加剧这种慢漂运动,高频水动力会引起平台纵摇、横摇、垂荡三个自由度的共振现象,称为Ringing现象。这些共振问题将会随着水深增大而愈加严重,这将对张力腿平台结构产生较大影响。此外,张力腿平台需要进行海底定位,这些问题都将让张力腿平台的设计和安装施工变得愈加复杂。
船舶类平台母型可以分为两大类船型,FPSO和油船或VLCC(超大型油船)。FPSO开始出现于1977年,具有灵活性高、适应海况能力强、存储油量较大、投资相对较低、重复使用率高等优点,目前FPSO是海上石油油气开发的最主要的手段。FPSO适用的水深范围为20~2000 m,一般由以下三大部分组成:船体部分、单点系泊系统部分和油气生产存储部分[15]。FPSO具有如下特点:甲板面积宽阔,便于生产设备布置,承重能力、抗风、浪、流和地震能力强,适应水深范围广,储/卸液体货物能力大,集生产处理、储存外输及生活、动力供应于一体,一般无动力,有软刚臂式单点系泊或动态定位装置。另外一种是油船改装,采用油船母型优势包括抗风、浪、流和地震能力强,适合于深远海,全球全天候的工作能力和自存能力。油船一般采用柴油动力,通常采用锚泊式系泊装置,不易改装、干舷小、浮力储备小、甲板上浪、长深比大、纵向弯矩大、尾机型,驾驶舱和生活区在后面,存在驾驶盲区[16]。
对于我国渤海海域,因为其属于较浅海域,平台类和船舶类都能完美满足,同时船舶类更容易满足目标吃水条件,并能提供更多的储备浮力。平台类和船舶类都具有较好的抗风、抗流能力,而平台的抗浪能力更佳。平台类依靠桩腿和沉垫对自身进行定位,船舶类依靠系泊系统进行定位。平台类的工程量、技术复杂度要低于船舶类,而其技术成熟度要高于船舶类。平台类相对船舶类,由于与海底接触,要抵抗极高的地震载荷,明显抗震能力很差,对海底土壤也有更多的适应性要求。FPSO和油船等船型类平台具有灵活性高、抗风浪强、工作水深范围广、重复使用率高等优点,比较适用于海上石油油气开发。另外,FPSO具有较好的浮力储备,但油船满载航行时干舷较小、浮力储备小、甲板易上浪,一般无动力,有单点系泊或动态定位装置。有许多FPSO驾驶舱和生活区在船首,而油船通常采用尾机型,驾驶舱和生活区在后面。相对油船的系泊系统来讲,FPSO由于自身采用单点系泊系统,更容易改装成目标船型。对于张力腿平台和 Spar平台,虽然抗风、抗浪能力强,但其移位十分不便,而且我国还没有生产和使用过此种类型的平台,技术不成熟。因此,不推荐采用这两种类型的平台作为海上动力平台备选方案。浮式平台中只有FPSO和半潜式平台技术比较成熟、移位比较方便、布置改装也比较容易,是浮式平台中最适合用于移动电站的平台类型。半潜式平台出现过沉没事故,而且我国现有的半潜式平台数量不多、经验不够,半潜式平台结构安全性有待深入研究。同时,考虑到作为海洋核电平台载体系统的特殊性,选取浮式船型FPSO作为核电平台改装船型具有以下几点优势:可以满足非能动性核电反应装置对于安全性的要求,尽量降低地震等环境作用影响,此外船型的双层底结构可以抵御多种事故载荷,保证核反应堆装置的安全性;单船体舱室具有较大的布置面积,便于核反应装置的布置与安放;目前对于FPSO的设计经验较丰富,平台设计可以借鉴,同时具有较高的经济性;可以借鉴目前已有的核电船民船的设计规范;可适用范围广,船型的海洋核电平台不仅可以用于渤海海域,也可以用于较深海域的南海,同时单船船型具有较好灵活性,可以方便安装海上设备、核料更换、报废退役,且安全可靠。因此,对渤海海域建议采用FPSO作为改装船型。
根据不同海况,目前FPSO系泊方式主要包括以下系泊方式:单点系泊系统、多点系泊系统和动力定位系统[17]。其中,FPSO广泛采用单一接触点的单点系泊系统方式。单点系泊方式门类较多,美国船级社ABS划分单点系泊系统有以下几种形式:单锚腿系泊系统(Single Anchor Leg Mooring System)、悬链锚腿式系泊系统(Catenary Anchor Leg Mooring System)、转塔式系泊系统(Turret Mooring System)和软刚臂式系泊系统(Soft Yoke Mooring System)四大类。转塔式系泊系统又分为内转塔形式(Inner Turret Mooring)(如图7所示)、外转塔式(External Turret Mooring)(如图8所示)或浮标式转塔系泊形式(Buoy Turret Mooring)、立管转塔系泊形式(Riser Tower Mooring)。软刚臂式单点系泊也有多种系泊形式,在我国渤海海域采用的软刚臂式单点系泊系统主要为系泊塔架式软刚臂系泊系统(如图9所示)、独立柱式软刚臂系泊系统(如图10所示)。世界上第一套单点系泊系统于1959年出现,该系泊为悬链锚腿式系泊系统。第一艘采用单点系泊系统方式的浮式储油装置(FPO)于 1972年诞生,工作于突尼斯海域油田。在 21世纪初时,采用单点系泊系统的 FPSO和FPO将达到500座左右。

图7 内转塔式系泊系统
图8 外转塔式系泊系统

图9 塔架式软刚臂系泊系统

图10 独立柱式软刚臂系泊系统
多点系泊系统(Spread Mooring)即船体与系泊系统之间通过多个接触点连接,将FPSO通过多点系泊系统方式固定于指定位置,开采的原油通过海底管道输送到FPSO的水下基盘,接着由FPSO舷侧的柔性立管输送到原油处理模块。外输的方式包括有串靠和旁靠等形式,其中,旁靠适应于深海海域的输送方式。另外为减小外输停靠油船停泊的影响,系泊链通常采用导览器从海底系泊船体。多点系泊方式下的FPSO船体和船首尾方向固定,没有风险标效应,受到环境作用力影响较大,因此其系泊海域受限于较为温和且风浪流条件较低的海域。
动力定位系统(Dynamic Positioning System)即通过动力定位浮式系统以实现系泊的方式,该方式系泊系统包括以下系统:动力装置推进系统、测量装置系统和定位控制系统。20世纪70年代已成功研制和使用动力定位系统,动力定位系统的优点是在海洋结构物低速情况下控制有效的驱动器来抵抗所受环境力的影响。正常情况下是对船舶或平台在纵横荡、艏摇等自由度下进行动力控制来实现力与力矩平衡。另外动力定位系统造价基本不会受水深影响,且该系泊方式较为可靠、操作方便[18]。
在上述系泊形式中,多点式系泊形式和转塔式系泊形式应用得最多,但我国浅水区域使用较多软刚臂系泊形式。软刚臂系泊结构简单、工作稳定可靠、维修工程量少,且有许多软刚臂系泊系统成功的应用实例以供参考,因此对于作业于渤海海域的海洋核电平台适宜采用软刚臂式单点系泊方式。
3 浮式核电平台研究技术手段
目前,针对软刚臂系泊型海洋核动力平台的水动力性能的研究甚少,但是对软刚臂系泊FPSO水动力性能的研究比较丰富,可以为大型核电平台的研究提供参考。FPSO各种性能研究是我国浅海油气田开发的技术关键。其中,国外研究的FPSO大多考虑深海海域情况,对于FPSO工作在浅海海域研究较少。软刚臂系泊系统在浅水中应用的优势明显,分析浅水软刚臂系泊FPSO动力响应特性方法主要有数值模拟、原型监测及模型试验三种技术手段。
3.1 数值模拟
系泊FPSO水动力性能数值预报的早期研究主要基于线性势流理论,数值模拟指导工程实际有一定的局限性,但在初步设计阶段可以提炼出研究的关键点,使相关研究更有针对性[19],近年来对软刚臂系泊型FPSO的研究较多。Liao和Chen (2010年)选取了“渤海蓬勃”号 FPSO,对其在作业海况条件下进行了研究,对比分析了软刚臂在不同压载情况下的运动和受力响应,对实际FPSO安装起到了一定指导作用[20]。Duggal(2011年)等对单点系泊系统FPSO在瞬时风速可达 50 m/s的暴风海况条件下的运动响应进行了模拟分析[21]。Wang等(2012年)以浅水软刚臂系泊FPSO船体为研究对象,采用多体法对系泊结构和FPSO船体的耦合运动和动力响应进行了探究[22]。刘晓健(2013年)发现在FPSO某些自由度运动的固有频率与低频波的频率接近时,产生的大幅共振运动会使系泊力响应也大幅增加,准确预报这种大幅度的运动与系泊力响应是单点系泊系统设计的关键所在[23]。刘成义等(2014年)基于三维势流理论和多体动力学法,建立了 FPSO-系泊腿-软刚臂的耦合模型,对软刚臂单点系泊系统相关参数对系统水动力性能的敏感性进行了探究[24]。田冠楠等(2016年)利用Ariane软件对百年一遇环境条件下作业于渤海海域的一艘15万t级FPSO船体在满载和压载两种工况下的软刚臂系泊系统的定位能力进行评估[25]。郑凯等(2016年)利用AQWA软件对风浪流联合作用下软刚臂系泊系统的水动力性能进行了频域分析,发现波浪低频作用大于高频作用[26]。刘成义等(2016年)针对不同水深/吃水比情况下的软刚臂单点系泊FPSO船体,分别采用Newman近似法和Pinkster近似法计算其二阶波浪力和软刚臂载荷,探究了两种计算方法的适用水深/吃水比条件[27]。
目前针对海洋工程开发的结构设计与系泊分析专业软件有 SESAM,HYDROSTAR,ARIANE及AQWA等。由于海洋水文环境包括各种方向的风、浪、流组合,浮体与系泊系统结构也非常复杂,数值分析软件对结构和边界条件的简化往往过多,对一些计算参数的选择随意性较大[28]。同时,运动的阻尼和流体的黏性有关,势流理论是不考虑流体的黏性的。以往的频域计算理论和时域模拟方法多是基于三维势流理论,波浪主要考虑线性波。数值模拟应用势流理论并不能准确估计FPSO的固有周期、运动响应等。此外,FPSO的大幅漂移等极端响应会导致船体运动的不稳定性,数值分析方法对这类问题还不能准确地模拟。
3.2 原型监测
原型监测是在海洋工程实际结构上进行测量,同步采集FPSO工作海域风、浪、流海洋环境条件,真实反映了各种海况下结构的荷载与响应。根据实测数据可达到检验设计和保障安全的目的,同时可对结构设计和载荷分析方法进行改进。
齐兴斌(2012年)通过原型测量的手段提出了软刚臂系泊系统可能的失效模式和判别指标[29]。陈光(2012年)通过 FPSO软刚臂系泊系统进行现场监测,发现了FPSO单点系泊系统产生共振的原因和共振现象考虑的关键因素[30]。王海平(2013年)对原型测量中的水上软刚臂系泊系统存在的横向摆动问题进行了研究[31]。武文华等(2015年)针对监测过程中系泊腿横摆异常行为,提出了一种基于原型监测的海洋结构疲劳性能分析方法,对软刚臂单点系泊系统上部铰接点疲劳特性开展研究[32]。刘莉峰等(2015年)对渤海服役的某软刚臂系泊FPSO应用监测系统,监测其在复杂海况运行期间的综合受力情况[33]。樊哲良等(2017年)基于实测原型系统,运用相位分析法对软刚臂系统与系泊船体横摇共振现象进行了探究[34-36]。
原型监测克服了模型试验的截断效应问题,结论的可靠性高于模型试验。由于海洋工程结构受到多种环境载荷的联合作用,原型监测不能像物理模型试验那样模拟加载各种典型工况。同时受现场环境和结构运动复杂等因素的制约,海洋结构原型监测实施较为困难,仅可作为项目研究的参考和补充。
3.3 模型试验
模型试验是研究浮式结构受风浪流联合作用复杂问题不可或缺的有效途径,模型试验的结果具有高度的可靠性。模型试验根据相似性原理制造缩尺实物模型,通过加载模拟工况得到载荷、运动响应等,进而预测原型的工作形态。Naciri等(2004)对浅水FLNG船及其软刚臂系泊系统进行了物理模型试验研究,发现浅水系泊FLNG对环境荷载非常敏感,并指出应特别注意浅水不规则波中的减水(set-down)长波[37]。肖龙飞(2007)通过不规则波浪作用下的FPSO动力响应试验研究,对浅水效应的内涵进行了深入解释[38]。苏方磊(2016)对软刚臂系泊FPSO的运动与系泊力响应特性进行了试验研究,系统分析了海洋环境荷载与结构尺度参数对浅水软刚臂系泊FPSO水动力性能的影响[39]。贾勇(2016)对软刚臂单点系泊式海洋核动力平台开展了风浪流联合物理模型试验,并使用小波分析手段对平台分别在随机波浪和联合作用波浪群性下的运动响应进行分析[40]。王美琪(2016)通过模型实验(如图11所示)和AQWA软件对软刚臂系泊式海洋核动力平台在规则波、不规则波以及风浪流联合作用下运动响应进行了对比分析,发现了风浪流在不同组合情况下对平台运动响应产生的不同影响情况[41]。

图11 浮式核电站模型实验
研究船舶等浮体在某项荷载作用下的响应问题时,常假定为线性系统的输入与输出关系。FPSO在实际工作工况下,风浪流等载荷通常同时存在。波浪在浅水区传播时,风会引起波浪的提前破碎,流也会引起波浪要素变形。研究己证实风和流的存在极大地改变了波浪的传播形态[42],接着将引起波浪的群性和非线性等特征参数发生改变。各种环境荷载因素之间相互作用导致线性系统的叠加性不再成立[43],因此对FPSO所受风浪流联合作用下的试验研究时,不能简单地将各因素单独作用时的结果进行线性叠加。渤海海域较多出现的极端环境条件是百年一遇波浪与各种方向的风和流的组合,风浪流组合的海况远比只有波浪的工况复杂,FPSO与软刚臂系泊系统将呈现空间六自由度的动力耦合。海洋环境条件及工况组合的复杂性导致物理模型试验将继续作为FPSO水动力研究的必要手段。
可以看出,对于软刚臂系泊式FPSO平台的水动力学研究,原型监测严重依赖于监测设备的发展程度,同时受限于监测海况的实际情况,仅作为研究的参考依据。数值模拟和模型实验都有各自优势和缺陷,且实际工程中还存在着大量问题。随着研究的不断深入,其发展趋势必然是以数值模拟代替模型实验和原型监测。
4 浮式核电平台研究展望
随着海洋开发的不断深入,系泊平台水动力学问题的研究趋势为:从线性分析到非线性分析,从频域理论到时域理论。尽管对软刚臂系泊平台水动力分析方法的研究已经取得了很多重要成果,但是在极端海况作用下水动力问题的研究仍存一些问题亟待解决。
1)如何考虑时域非线性问题,兼顾计算量和存储量,提高计算效率和数值稳定性。解决对瞬时复杂边界的捕捉及边界网格重构问题,实现对大型复杂结构物的长时间精确数值模拟。
2)如何考虑系泊机构的时变特性,兼顾与平台的相互作用,实现系泊装置与平台浮体的实时耦合分析。
由此,有必要对极端海况下软刚臂系泊海洋核电平台的水动力问题进行更深入的研究,加深对极端海况系泊浮体运动机理的理解。针对极端海况下有限水深软刚臂系泊海洋核动力平台运动中的时域非线性、系泊机构时变性、系泊系统与浮体耦合特性等问题的研究存在以下几个方向。
1)数值模型的开发。需要采用合适的波物作用理论,建立可以模拟系泊核动力平台运动的时域完全非线性数值模型,使其能够应用于求解完全非线性波浪与系泊浮式平台相互作用的问题。
2)系泊系统时变刚度数值计算模型和优化方法。针对软刚臂式系泊系统,推导软刚臂系泊机构的动力计算公式,利用多刚体机构的受力及运动协调关系,建立系泊系统的时域受力及运动响应数值计算模型。通过系泊系统的全局参数化分析,研究影响系泊系统刚度各因素的作用规律,进行各因素重要性排序,建立系泊系统目标参数优化方法。
3)极端海况下软刚臂与系泊平台耦合作用的数值模拟与实验研究。将平台运动的时域非线性的数值模型与系泊系统时变刚度数值计算模型对接,建立软刚臂与系泊平台耦合作用的数值模型,开展极端海况下软刚臂与系泊核动力平台相互作用的试验研究。
5 结语
随着“国家能源重大科技创新工程海洋核动力平台示范工程”项目的立项以及深入开展,海洋核动力平台的安全性能也必将成为国内海洋工程界研究热点之一。基于核能利用的谨慎性,针对极端海况下软刚臂系泊式海洋核动力平台水动力性能的研究也必将向着时域非线性、系泊机构时变性及系统浮体耦合非线性方向发展,以便可以准确地预报出海洋核动力平台在服役期间内可能遭遇的极端海况下的生存能力,降低风险。
参考文献:
[1] 马云甲. 构建中国海洋核动力平台产业基地[J]. 中国军转民, 2015(9)∶ 62-64.
[2] LEE K H, KIM M G, LEE J I, et al. Resent Advances in Ocean Nuclear Power Plants[J]. Energies, 2015(8)∶11470-11492.
[3] KOSTIN V I,PANOV Y K, POLUNICHEV V I, et al.Floating Power-generating Unit with A KLT-40s Reactor System for Desalinating Sea Water[J]. Atomic Energy,2007,102(1)∶ 31-35.
[4] 车鸣雷. 核动力平台软刚臂系泊结构方案设计研究[D].大连∶ 大连理工大学, 2016.
[5] 赵红. 软刚臂系泊海洋核动力平台水动力响应计算[D].大连∶ 大连理工大学, 2016.
[6] 吕松泽, 刘洪君, 蔡琦, 等. 海洋核动力平台核安全监督初探[J]. 科技创新导报, 2016, 34(12)∶ 46-48.
[7] HAF102, 核动力厂设计安全规定[S].
[8] 秦尧. 软刚臂单点系泊 FPSO动力响应特性研究[D].天津∶ 天津大学, 2013.
[9] 娄明阳. 自升式海洋平台动力特性分析[D]. 哈尔滨∶哈尔滨工程大学, 2013.
[10] 李巨川. 浅海水域座底式平台安全定位措施与监测技术[J]. 内江科技, 2008(11)∶ 107.
[11] 周广利, 白若阳. 导管架平台的动力分析[J]. 中国海洋平台, 2006(1)∶ 45-48.
[12] 杨立军, 肖龙飞, 杨建民. 半潜式平台水动力性能研究[J]. 中国海洋平台, 2009(1)∶ 1-9.
[13] 黄维平, 白兴兰, 孙传栋, 等. 国外Spar平台研究现状及中国南海应用前景分析[J]. 中国海洋大学学报(自然科学版), 2008(4)∶ 675-680.
[14] 任顺利. 张力腿平台动力响应研究[D]. 青岛∶ 中国石油大学,2008.
[15] 肖龙飞, 杨建民. FPSO水动力研究与进展[J]. 海洋工程, 2006(4)∶ 116-123.
[16] 徐业峻. 油船改装FPSO结构探析[J]. 造船技术, 2009(5)∶ 11-13.
[17] 朱为全, 李达, 高巍, 等. 浅水恶劣环境下单点系泊系统设计[J]. 中国海洋平台, 2016(2)∶ 14-20.
[18] 王会丽. 单点系泊下船舶动力定位控制方法研究[D].哈尔滨∶ 哈尔滨工程大学, 2013.
[19] 李淑一. 浅水软刚臂系泊 FPSO水动力性能和运动响应数值研究[D]. 青岛∶ 中国海洋大学,2011.
[20] LIAO S W, CHEN D H. Assessment of SYMS Survival Limit for “Peng Bo” FPSO during Installation[C]// Proceedings of ASME 2010 29th International Conference on Offshore Mechanics and Arctic Engineering. Shanghai∶ASME, OMAE2010-20817, 2010.
[21] DUGGAL A, HEYL C, AMIR H, et al. Response of FPSO System to Squalls[C]// Proceedings of the ASME 2011 30th International Conference on Offshore Mechanics and Arctic Engineering OMAE 2011. Rotterdam,The Netherlands, USA∶ ASME, 2011∶ 19-24.
[22] WANG S Q, LI S Y, CHEN X H. Dynamical Analysis of a Soft Yoke Moored FPSO in Shallow Water[C]//Preceedings of the 6thInternational Conference on Asian and Pacific Coasts(APAC). 2012.
[23] 刘晓健. FPSO单点系泊系统运动响应分析[D]. 江苏∶江苏科技大学,2013.
[24] 刘成义, 唐友刚, 李焱, 等. 浅水单点系泊 FPSO 软刚臂参数敏感性分析[J]. 中国舰船研究, 2014,9(5)∶ 69-76.
[25] 田冠楠, 刘昊, 李牧. FPSO软刚臂单点系泊系统载荷数值分析[J]. 船海工程, 2016, 45(5)∶ 16-19.
[26] 郑凯, 林哲, 孙雷, 等. 风浪流联合作用下软刚臂系统的受力研究[J]. 舰船科学技术, 2016, 38(11)∶ 65-69.
[27] 刘成义, 唐友刚, 李焱. 水深对软刚臂单点系泊 FPSO动力性能的影响[J]. 海洋工程, 2016, 34(1)∶ 25-32.
[28] 王海平. 基于原型测量的 FPSO软刚臂系泊系统性能分析[D]. 大连∶ 大连理工大学, 2013.
[29] 齐兴斌. FPSO软刚臂单点系泊系统原型测量及分析评价[D]. 大连∶ 大连理工大学, 2012.
[30] 陈光. FPSO软刚臂系泊系统运动分析及减振研究[D].大连∶ 大连理工大学, 2012.
[31] 王海平. 基于原型测量的 FPSO软刚臂系泊系统性能分析[D]. 大连∶ 大连理工大学,2013.
[32] 武文华, 吕柏呈, 杜宇, 等. 基于原型实测的软刚臂系泊系统疲劳性能分析方法研究[C]// 第十七届中国海洋(海岸)工程学术讨论会论文集. 南京∶ 中国海洋工程学会, 2015.
[33] 刘莉峰, 赵玉梁. FPSO单点软刚臂系泊监测系统[J].船海工程, 2015, 44(3)∶ 83-86.
[34] 樊哲良, 岳前进, 武文华, 等. 软刚臂系泊系统水平系泊力原型测量方法[J]. 上海交通大学学报, 2014, 48(4)∶475-481.
[35] 樊哲良, 王延林, 岳前进, 等. 软刚臂监测的设计验证[J]. 哈尔滨工程大学学报, 2016, 37(3)∶ 306-312.
[36] 樊哲良, 王延林, 岳前进, 等. 基于实测的软刚臂横摆疲劳分析[J]. 上海交通大学学报, 2017, 51(3)∶ 332-337.
[37] NACIRI M, BUCHNER B, BUNNIK T, et al. Low Frequency Motions of LNG Carriers Moored in Shallow Water[C]// 23rd International Conference on Offshore Mechanics and Arctic Engineering. ASME, 995-1006,2004.
[38] 肖龙飞. 浅水波及软刚臂系泊FPSO浅水效应研究[D].上海∶ 上海交通大学, 2007.
[39] 苏方磊,马小舟,马玉祥. 单点系泊系统系泊力响应特性分析[J]. 港工技术, 2016, 53(2)∶ 46-49.
[40] 贾勇. 基于小波变换的软刚臂单点系泊浮式平台运动响应的试验研究[D]. 大连∶ 大连理工大学, 2016.
[41] 王美琪. 海洋核动力平台单点系泊系统水动力性能的数值研究[D]. 大连∶ 大连理工大学, 2016.
[42] 李玉成, 滕斌. 波浪对海上建筑物的作用[M]. 北京∶海洋出版社, 2002.
[43] 俞聿修, 柳淑学. 随机波浪及其工程应用[M]. 大连∶大连理工大学出版社, 2011.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
船海工程(2020年3期)2020-07-31
建材发展导向(2019年10期)2019-08-24
振动工程学报(2019年2期)2019-05-13
价值工程(2019年36期)2019-01-11
船舶与海洋工程(2018年4期)2018-09-10
水运管理(2017年11期)2018-01-02
科技经济市场(2017年2期)2017-05-22
珠江水运(2015年12期)2015-07-25
中国水运(2015年5期)2015-07-13