基于Cesium平台中车辆的碰撞识别跟踪
2018-04-25 07:36:10,
计算机测量与控制 2018年4期
,
(交通运输部天津水运工程科学研究院 信息化中心,天津 300456)
0 引言
基于Cesium平台的车辆碰撞识别跟踪方法,最常用的是基于模型和特征的方法,具有较好鲁棒性和实时性,并且以JavaScript库中的3D绘图协议(WebGL)地图作为引擎,如果前方车辆与摄像机相对运动距离较小时,那么利用该引擎可将车辆与背景区域区分开来[1]。利用车辆某些显著的特征,比如阴影和边缘可将车辆从背景中分割出来,虽然受到周围环境噪声影响,但是从单一特征信息中提取车辆碰撞地理位置信息是相对容易的[2]。结合阴影特征采用小波包技术对车辆碰撞进行识别与跟踪,缺乏实时性;利用边缘对称性对车辆碰撞进行识别与跟踪,只能应用于形变较小的车辆,对于大型车辆并不适用。采用传统方法进行识别与跟踪,效果较差,无法得到精准车辆数据[3]。
针对上述存在的问题,提出了基于Cesium平台中车辆的碰撞识别与跟踪。结合多种车辆碰撞信息,采用区域性假设验证方法对车辆底部阴影部分进行检测,提取车辆区域边缘特征和序列图像不可屏蔽中断(NMI)特征来实现车辆碰撞目标的识别与跟踪,通过实验验证结果可知,该方法识别与跟踪效果较好。
1 基于Cesium平台车辆碰撞识别与跟踪
Cesium平台指的是在一个不需要任何插件的浏览器上构建的3D虚拟平台,利用JavaScript库中的3D绘图协议(WebGL)进行硬件图像加速处理,适应于动态数据的可视化管理。该平台是基于Web服务器软件(Apache)许可的开源程序基础上进行研发的,可免费用于商业和非商业用途[4]。Cesium平台是一个基于JavaScript库编写而使用3D绘图协议(WebGL)地图引擎,可用于交互车辆碰撞识别在移动设备上展现的3D内容,充分支持使用图像加速标准来规定车辆的碰撞识别与跟踪。
1.1 车辆的碰撞识别
车辆碰撞识别流程主要包括对样本进行训练,需提取出正、负两种样本特征,利用离线训练出来的车辆碰撞识别分类器识别出多尺度模块,并将识别图像进行处理,由此获得到的识别结果需进行标记[5]。在Cesium平台下车辆碰撞识别具体流程如下所示:首先选取正样本和负样本,计算积分图,将积分图中的矩形特征进行提取;然后使用单个弱分类器进行训练,选择最优弱分类器组成强分类器,强分类器可连城级联分类器。同时,将待检测的图像也进行积分图计算,采用多尺度扫描方式获得窗口,再次提取特征,利用分类器再次进行识别。最后,将两者识别结果同时显示出来。
1.1.1 正、负样本特征提取
正样本集特征的提取应包含车辆图像共2000张,图片需经过预处理。负样本集特征的提取不包含正样本中的图像共4300张,此时图片是不需要经过预处理的[6]。
1.1.2 Cesium平台积分图
积分图是对样本特征集子区域进行提取,并加速求和的数学方法,将任意矩形区域内像素和相机可获取图形加速特征的计算,如图1所示。

图1 Cesium平台积分图
由图1可知:积分图中点(a,b,c)大小取决于其内部矩形区域的所有图像像素值大小。内部矩形特征即为分类的矩形特征,指的是图像中长方体特征,针对车辆碰撞,需考虑其正面轮廓特征和安全停车距离。
1.1.3 分类器
针对车辆碰撞识别的分类器的构建,首先需对正、负样本特征进行提取,由此获得提取样本矩形特征,然后对特征进行训练可得到单一的弱分类器,使用权值系数线性组合方式可获取强分类器,最后将所有分类器级联。其中,每一个弱分类器都对应一个矩形特征,将具有合理特征值的数据作为阈值,可降低弱分类器进行车辆碰撞样本识别数据分类错误现象的发生。针对强分类器在Cesium平台下进行构建,通过迭代方式可获取特征样本的分布情况,强大的分类器可包含所有的弱分类器,其主要原理为:将车辆碰撞图像输入,在所有的单一弱分类器中进行车辆有无碰撞(即1或0)的投票,对投票结果进行统计可获得车辆碰撞样本识别数据分类错误率,经过加权、求和后可得到分类结果[7]。从简单到复杂对所有单一弱分类器集合的强分类器进行逐级串联,可最终获取级联分类器,其中包含所有车辆碰撞的图像子窗口,通过层层选拔,可得到最优强分类器,并最终被识别,如图2所示。
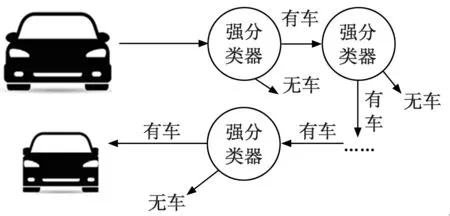
图2 分类器识别过程
1.2 车辆碰撞跟踪
车辆碰撞跟踪处理流程可分成两条主线:一条是从灰度图像中提取出阴影特征进行检测,排除噪声影响,生成车辆假设区域,定位区域内车辆;另一条是从灰度图像中提取相关车辆碰撞的特征,并进行跟踪检测,产生预测车辆区域,并进行车辆不可屏蔽中断验证,如果验证成功可输入到扩展预测区域,并进行区域内车辆定位。如果验证失败,那么需要放弃跟踪。
1.2.1 阴影检测
由于在跟踪过程中,容易受到各种干扰因素的影响,使得车辆在行驶时,容易出现远近区域灰度差距过大的现象,在Cesium平台下对车辆碰撞进行3D模拟,模拟图像底部与路面消失交界点时像素灰度变化最大值的地方,从远处看,车辆碰撞阴影区域与图像底部像素灰度值相差较小。为此采用统计数据方式在Cesium平台下确定路面阈值大小,虽然该方法容易受到路线和车辆等因素的干扰,但是由于获取的阈值误差时可忽略的,能够实时反映出路面灰度变化情况[7]。为此,采用梯度阴影检测方法,将路面上的像素灰度分布情况由近及远依次进行分析,可发现该分部是具有连续性的,并且在碰撞车辆底部处像素灰度值与周围其他像素灰度值相比明显较低,对于像素灰度的分布情况可发现车辆碰撞图像是存在较大落差的。通常情况下,在车道实线路上,像素灰度值的分布情况总体是具有连续性的,而在车辆底部阴影部分的像素灰度值与之相比却较低,该种情况使得碰撞车辆的车身像素灰度分布情况与前方路面像素灰度分布情况相比较混乱,该现象被称为车辆碰撞像素灰度低谷期[8]。针对在实线列上出现的像素梯度问题,需在车辆碰撞阴影处对其特征进行提取,该部分的特征是在低谷值前和高峰值后,为此可根据获取的梯度分布情况作为车辆碰撞阴影检测基础,可完成车辆碰撞跟踪的初步定位,这样可以减少因路面受到干扰因素影响造成的灰度变化误差,也可以排除因车辆碰撞跟踪误差出现车道线干扰问题。
针对上述分析,可对阴影部分进行检测,具体步骤如下所示:
1)从左至右,自获取图像底部至顶部依次对图像像素梯度值进行计算,如下所示:
G(a,b)=G(a-1,b)-G(a+1,b)
(1)
其中:G(a,b)表示车辆碰撞获取图像的第a行、第b列像素点梯度值。
2)对每列梯度数据进行扫描时,需采用自下向上的方式记录相邻点的极大值和极小值。
3)针对两个极值点序列问题,采用从左向右扫描方式对连续出现极点进行扫描,如果连续出现极点个数能够在两个极值点列上共同存在,那么需对同种阴影区域进行标记,由此可证明极值点是可以同时存在的。
将获取的同类阴影区域进行标记,并对平均值、极小值和阴影边界的起始和终止位置作为左右边界的阴影区域。
1.2.2 排除非车辆碰撞阴影区
根据上述获得的阴影区,可知会存在一些误差,因为在获取过程中会受到路面杂质等各种暗色区域的影响,促使后续对车辆碰撞跟踪研究不支持。针对不同方法获取的目标区域分数维度,计算图像边缘维数时,需构建一个虚拟的以阴影顶部为底边界的图形,一般情况下,选取的阴影宽度不大于目标区域宽度。进行测试的车辆碰撞区域分形维度与非车辆碰撞区域的相比较大,剔除分形维度小于设置阈值的区域,即为对应的阴影。
1.2.3 车辆定位与验证
车辆碰撞一旦经过透视变化就会发生形变,但是车辆区域的水平边缘数据会被保存下来,比如车辆碰撞的地盘和挡风玻璃等,利用该特征可实现车辆碰撞区域的定位,具体步骤如下所示:
1)将剔除掉的非车辆碰撞阴影剩余的阴影区水平中线作为底边界 ,向左或向右进行延伸5~8个像素作为车辆碰撞区域宽度,将宽度设置为高度的2/3倍,构建车辆碰撞的候选区域。
2)将水平边缘作为检测处理的车辆候选区域,在原始灰度图像数据中进行二值化处理,由此可获得候选区域的二值图像数据。
3)统计二值图像中连续水平边缘位置信息来确定车辆区域精确位置。
定位车辆碰撞区域准确位置后,采用基于Cesium平台的JavaScript库编写程序来对车辆碰撞进行验证,即使用序列图像不可屏蔽中断(NMI)特征方法来实现车辆区域是否真的存在碰撞车辆[9]。将惯量进行归一化转动,具有良好平移、旋转和缩放的特点,可适用车辆运动实时性图像的形变。基于Cesium平台的序列图像不可屏蔽中断(NMI)特征存在计算量、误差小的优势,可区分不同物体高度,对视频车辆的检测具有高标准要求。该特征的基本思路是将图像中任何一点的像素都看出该点的质量,为此,进行跟踪验证时就可说车辆碰撞图像是有质量的物体,因此,该图像具有图像转动惯性。在位置精确过程中,计算车辆区域不可屏蔽中断(NMI)特征值,如果该区域存在车辆碰撞,那么在连续的帧数图像中,车辆碰撞区域图像不可屏蔽中断特征值变化并不显著;如果该区域不存在车辆碰撞,那么在连续的帧数图像中,车辆碰撞区域图像不可屏蔽中断特征值变化较大,那么需放弃对该区域的跟踪。
1.2.4 基于Cesium平台目标跟踪算法
针对基于Cesium平台目标跟踪算法首先需采集车辆碰撞连续帧图像,然后对图像进行识别,将首次出现的车辆碰撞目标进行标记,将此图像作为初始帧,并将标记的矩形窗口作为目标窗口。利用Cesium平台下的基于颜色-纹理模型的跟踪算法对车辆进行3D实时跟踪[10]。针对对初始帧与其他连续帧图像进行处理时,需先标记目标窗口作为中心窗口,进而确定车辆碰撞行驶轨迹,具体目标跟踪算法实现过程如下所示:1)迭代次数,读取初始帧;2)计算当前帧数以核心为目标的窗口中心颜色-纹理模型直方图,由此可获得目标模型;3)读取下一帧,计算目标候选区域中心的颜色-纹理模型直方图,由此可获得候选模型;4)计算权值;5)按照迭代算法获取实际候选窗口中心;6)如果进行迭代次数达到最大值时,需返回到第2)阶段;如果进行迭代次数超过或者位于两个窗口间距离时,可进行下一步;7)当前帧是最后一帧,进行收敛,那么对目标车辆跟踪即为成功。
2 实验
为了验证基于Cesium平台中车辆的碰撞识别跟踪方式合理性,进行了如下实验。在识别和跟踪过程中在Cesium平台下进行开发并实现,对换道中的场景进行重新配置,该场景包括多种模型参数,在运行车辆碰撞识别和跟踪实验验证结果可进行车辆换道等方法进行实时检验。实验采用一台安装在车辆内部的CCD摄像机对公路路况进行实时采集,将采集到的食品在Windows8系统下的Cesium平台进行3D模拟,并呈现。
2.1 实验结果与分析
在Cesium平台下,构建单向双车道进行虚拟3D交通环境模拟。进行换道操作的工况下对系列帧图像进行采集,结果如图3所示。
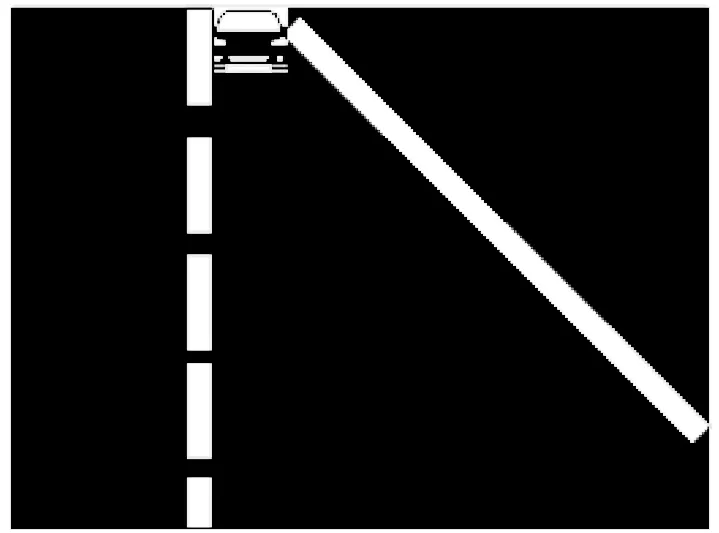
图3 换道工况
由图3可知:车辆在换道过程中,虽然在图像帧数中相对于车辆角度发生变化,但是也能及时被识别出来,准确提取出车辆前轮廓特征和边缘特征,通过对大量数据特征样本训练能够得到性能较好的分类器,为此,即使从不同角度观察车辆碰撞情况,也能被准确识别出来。
将初始帧图像中的车辆碰撞进行识别标记,其矩形窗口为车辆跟踪的初始化窗口,同时标记矩形窗口作为中点,通过对车辆碰撞工况进行跟踪验证,采集系列帧图像,进行处理后的效果如图4所示。
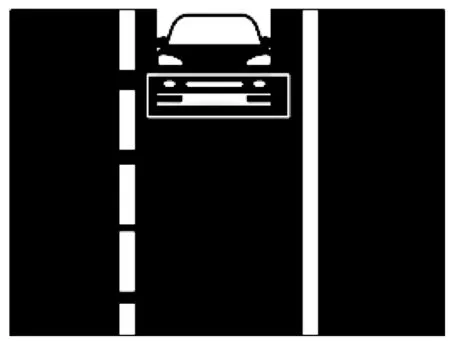
图4 跟踪效果
由图4可知,在车辆碰撞工况下,矩形窗口中心点位置发生了改变,即为实验过程中车辆运行轨迹。由于采集到的系列帧图像矩形窗口中点线可近似当作一条直线,与原始车辆发生碰撞的运行轨迹路线和可视化模块中的显示效果相符合,为此该方法具有良好跟踪效果。
为了验证该方法具有可靠性,将传统方法与改进方法在Cesium平台上直接读取每一帧合成的碰撞样本进行判断以验证不同方法的检测率,实验结果如表1所示。

表1 两种系统方法性能验证
由表1可知:在碰撞样本总数一定条件下,当信噪比为0时,传统方法车辆碰撞漏报数为2,获取的检测率为84.97%,而改进方法车辆碰撞漏报数为0,且获取的检测率为100%,相比于传统方法检测率高出15.03%;当信噪比为0.3时,传统方法车辆碰撞漏报数为4,获取的检测率为75.09%,而改进方法车辆碰撞漏报数为3,且获取的检测率为99.21%,相比于传统方法检测率高出24.12%;当信噪比为0.5时,传统方法车辆碰撞漏报数为15,且获取的检测率为60.04%,而改进方法车辆碰撞漏报数为11,且获取的检测率为98.05%,相比于传统方法检测率高出38.01%。
2.2 实验结论
本文研究的基于Cesium平台中车辆的碰撞识别跟踪方式具有合理性,与传统方法相比,该方法车辆发生碰撞时运行轨迹路线和可视化模块中显示效果相符合,该方法具有良好跟踪效果。在碰撞样本总数一定条件下,当信噪比为0时,传统方法车辆碰撞漏报数为2,改进方法车辆碰撞漏报数为0,且获取的检测率相比传统方法检测率高出15.03%;当信噪比为0.3时,传统方法车辆碰撞漏报数为4,改进方法车辆碰撞漏报数为3,且获取的检测率比传统方法检测率高出24.12%;
当信噪比为0.5时,传统方法车辆碰撞漏报数为15,改进方法车辆碰撞漏报数为11,且获取的检测率比传统方法检测率高出38.01%,由此可看出,改进研究方法车辆碰撞识别跟踪效果较好。
3 结束语
使用基于Cesium平台的积分图方法加速车辆碰撞特征提取,可减少图像处理时间,该算法具有实效性,利用该特征和分类器结合方式能够对车辆碰撞进行识别,具有较高识别性能。通过实验设计,得出实验结论,由结果可知,该方法对车辆碰撞识别和跟踪具有良好效果,可为对车辆碰撞距离测量和预警的研究提供参考。
参考文献:
[1] 张秋霞, 王凌云. 基于GPS/GSM汽车跟踪定位系统的设计与实现[J]. 电子设计工程, 2017, 25(7):27-30.
[2] 刘 军, 高雪婷, 王利明,等. 基于OpenCV的前方车辆检测和前撞预警算法研究[J]. 汽车技术, 2017, 38 (6):11-16.
[3] 王 鑫, 贾庆轩, 高 欣,等. 基于位图构建的RFID自适应N树防碰撞算法[J]. 上海交通大学学报, 2015, 49(2):150-157.
[4] 刘 敏, 熊岳山, 谭 珂,等. 基于改进碰撞检测算法的肝门静脉结扎仿真[J]. 计算机工程与科学, 2017, 39(1):151-157.
[5] 张文胜, 解 骞, 钟 瑾,等. 基于八叉树邻域分析的光线跟踪加速算法[J]. 图学学报, 2015, 36(3):339-344.
[6] 李志坚, 肖熠琳. 一种基于二进制码调制的射频识别防碰撞算法[J]. 计算机工程, 2015, 41(2):308-312.
[7] 梁秀满, 付董帅, 牛福生,等. 基于Otsu图像分割的颗粒与气泡碰撞检测方法[J]. 中国矿业, 2017, 26(6):127-130.
[8] 张启彬, 王 鹏, 陈宗海. 基于速度空间的移动机器人同时避障和轨迹跟踪方法[J]. 控制与决策, 2017, 32(2):358-362.
[9] 黄于欣. 基于openCV的视频路径船舶检测与跟踪[J]. 舰船科学技术, 2017, 15 (16):28-30.
[10] 马 飞, 杨皞屾, 顾 青,等. 基于改进A*算法的地下无人铲运机导航路径规划[J]. 农业机械学报, 2015, 46(7):303-309.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
电子测试(2018年1期)2018-04-18 11:52:35
自动化学报(2017年5期)2017-05-14 06:20:56
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
光学精密工程(2016年1期)2016-11-07 09:01:59