基于改进证据理论的导弹故障诊断方法
2018-04-25 07:05吴进煌赵建印赵建忠
海军航空大学学报 2018年1期
吴进煌,赵建印,赵建忠
(1.海军研究院特种勤务研究所,北京100089;2.海军航空大学,山东烟台264001)
进行导弹故障诊断时,采用基于属性约简的故障诊断规则获取方法虽能够获得简单的导弹故障诊断规则,但在对新的超差测试数据进行诊断时存在无法直接得到诊断结果,甚至会出现诊断冲突的情况[1-2]。而D-S证据理论(DST)作为一种有效的不确定性推理方法,能够有效解决冲突信息对合成结果的不利影响。随着DST的理论与方法不断完善,许多学者开展了DST改进以及在信息融合、图像处理、故障诊断、目标识别等方面的研究,取得了丰富的成果[3-9]。因此,开展应用DST来实现导弹故障诊断方法的研究具有重要意义。
1 D-S证据理论概述
证据理论最初是由Dempster教授提出,而后由Shafer进行不断完善。因此,后人将证据理论命名为D-S证据理论(DST)。
1.1 基本概念
定义1:识别框架。设 Θ={θ1,θ2,…,θN}是一个包含N个元素(事件)的完备有限集合,且Θ中的所有元素互不相容,则Θ称为识别框架。Θ中所有子集构成的集合称为识别框架的幂集2Θ。
定义2:基本概率赋值。基本概率赋值,也称为基本可信度分配函数。对于识别框架Θ而言,基本概率赋值m满足映射2Θ→[0,1],若任一子集A⊆Θ,满足

则称m(A)为A的基本概率赋值[10-11]。
对于识别框架Θ内的任一子集A,若m(A)>0,则称A为焦元,其包含识别框架元素(事件)的个数称为焦元的基。
定义3:信任函数。设信任函数Bel满足映射2Θ→[0,1],A是识别框架Θ内的任一子集,若B⊆A⊆Θ,且满足则称Bel(A)为A的信任函数[10-11]。

定义4:似然函数。设似然函数Pl满足映射2Θ→[0,1],若识别框架Θ内的任一子集A,满足

则Pl(A)称为似然函数[10-11]。用[Bel(A),Pl(A)]来表示事件A的不确定区间,也称信度区间。
1.2 合成规则
对于识别框架Θ而言,m1、m2是证据E1、E2对应的基本概率赋值,焦元分别为Ai和Bj,则D-S合成规则可表示为[10-13]:
1.3 推理过程
DST的推理是以建立的系统识别框架为基础的。首先,通过系统识别框架来构造证据体E;然后,根据收集到的资料,获取各证据体的基本概率赋值(基本可信度分配),并计算每一个证据体作用下,识别框架内各事件的信度区间[Bel(A),Pl(A)];利用D-S合成规则计算所有证据体联合作用下各事件的基本概率赋值和信度区间,并得到推理结论。DST的推理过程见图1。
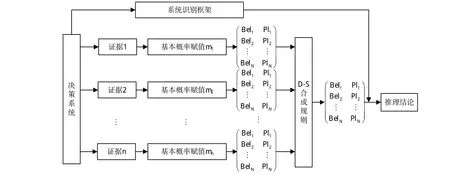
图1 证据推理过程Fig.1 Evidence reasoning process
2 D-S证据理论的改进
2.1 基本概率赋值的获取方法


证据可信度是对于决策属性D某一决策值,条件属性ck的某一取值所包含的对象数与该决策值包含对象数的比例。在条件属性ck某取值下得到的基本概率赋值可以表示为:

2.2 基于证据间的相似系数的证据可信度求取
定义6:证据间的相似系数。对识别框架Θ而言,m1、m2是证据E1、E2对应的基本概率赋值,其焦元分别为Ai和Bj,则证据E1和E2之间的相似系数为[10-11]:

式(7)中,Ak=Ai⋂Bj。相似系数s12体现了证据m1和m2之间的相似程度,且s12∈[0,1]。当s12=0时,表示证据E1和E2完全冲突;当s12=1时,表示证据E1和E2完全相同。
设决策系统的证据个数为n,计算得到证据E1和E2的相似系数,从而可以得到相似矩阵:

在相似矩阵中,每一行除对角线元素外的其他元素相加,可以得到该行对应的证据被其他证据的支持程度,即支持度,可以表示如下:

将证据支持度进行归一化后,可得到证据可信度

对于每一条证据而言,可信度越大的证据反映的决策情况越符合实际,其作用也越大。因此,将可信度Crd(mi)可看作证据Ei的权重wi。
2.3 新的冲突权重分配方法
基于证据间距离和相似系数的冲突权重分配方法都仅仅考虑了证据间的相互支持度,没有考虑证据本身对决策的作用。当证据本身不确定程度较高时,虽然其导致的冲突会较低,但是该证据对做出决策的作用也较低。因此,本文在考虑证据与决策系统的决策趋势的一致性较好前提下,证据的不确定程度越低,对决策越有效,在冲突权重分配时,该证据的权重也应该越高,以便能够更好地做出正确决策。
定义6:信息熵。设识别框架 Θ={θ1,θ2,…,θN} 包含n个证据E1,E2,…,En,m1,m2,…,mn分别是其对应的基本概率赋值,则第i个证据的信息熵的定义为[8]:

定义7:证据一致性。设E1,E2,…,En为识别框架Θ={θ1,θ2,…,θN}中的n个证据,m1,m2,…,mn分别是其对应的基本概率赋值,那么证据一致性可定义为:

定义8:证据有效性。设识别框架Θ下的n个证据E1,E2,…,En,m1,m2,…,mn分别是其对应的基本概率赋值,则证据有效性可定义为

本文利用证据有效性与证据可信度,重新定义冲突证据的权重分配为[10,14]
2.4 改进的冲突证据合成方法
由新的冲突证据权重分配方法可得到改进的冲突证据合成方法,步骤如下:
Step1:对识别框架内的n个证据,分别计算各证据之间的相似系数sij,并得到相似矩阵S;
Step2:根据相似矩阵计算其他证据对第i个证据的支持度,将支持度进行归一化后,得到各个证据的可信度;
Step3:通过计算各个证据的一致性和信息熵,并根据式(14)得到证据的有效性;
Step4:考虑证据可信度与证据有效性对冲突证据的影响,根据式(15)对冲突证据的权重进行重新分配;
Step5:根据新冲突证据权重分配,重新定义冲突分配函数f(A),得到新的冲突证据的合成规则[15-16]:


表1 导弹验证样本Tab.1 Checking sample of missile
3 基于DST的导弹装备故障诊断推理模型的建立
运用改进的D-S证据理论建立导弹故障诊断推理模型,具体描述如下:
Step1:在完备化的导弹决策系统基础上,构造识别框架 Θ={θ1,θ2,…,θN},其中,θ表示决策系统中的决策属性(可能发生故障的部件),N表示决策属性的个数;同时,条件属性(测试参数)为识别框架下的证据E;
Step2:将需要诊断的导弹超差测试数据进行离散化[17-18],转化为可用于决策的数据形式;
Step3:根据D-S合成规则的基本性质计算该超差测试数据的证据信任度,即基本概率赋值m[5];
Step4:根据本文改进的冲突证据合成方法,得到各决策属性总的基本概率赋值,通过基本概率赋值的大小来判断可能发生故障的部件,并输出诊断结果。
4 实例验证
以某型导弹的雷达导引头的信号处理组合为研究对象,能够反映信号处理组合工作状态的导弹测试参数指标为c1~c8,经过16次测试得到测试数据集S,其常见的故障D记为d0、d1和d2,N表示某超差测试数据对应的故障出现的次数。根据厂家说明书给出的测试项正常取值范围,得到精确的离散化区间,测试数据正常用“0”表示,超差则用“1”来表示,表1给出了多次测试提取出的超差测试数据y;表2为经过离散化之后的完备的决策系统。以导弹信号处理组合的超差测试数据y来验证本文方法的有效性。
完备的决策系统R={ }c1,c2,c3,c4,c5,c6,c7,c8作为证据E1、E2、E3、E4、E5、E6、E7和E8,其对应的基本概率赋值分别为m1、m2、m3、m4、m5、m6、m7和m8,决策属性d0、d1、d2分别作为识别框架的元素θ1、θ2、θ3,计算得到导弹超差测试数据y的基本概率赋值,如表3所示。

表2 完备的决策系统Tab.2 Complete decision system

表3 y1的基本概率赋值Tab.3 Basic probability assignment ofy1
根据冲突因子的计算公式,得到K=0.9999。若采用经典D-S合成方法得到合成结果为:m(θ1)=0,m(θ2)=1,m(θ3)=0 ,诊断结果为“d1”,而实际发生的故障部件为“d2”,故诊断结果错误。因此,经典D-S合成方法无法在高冲突的情况下,对导弹进行故障诊断。而采用Yager方法[7]和孙全[8]方法会将冲突概率赋予未知项,合成结果无法准确地给出诊断结果。采用本文改进的冲突证据合成方法对此类高冲突证据进行合成,合成步骤如下:
Step 1:计算相似度矩阵S。

Step 2:根据式(9)计算证据间的支持度。
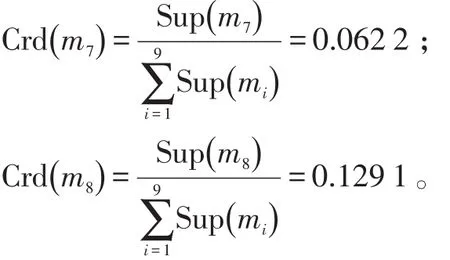
根据式(10)计算证据可信度:
Step 3:计算证据的信息熵。H1=0.6365;H2=1.0506;H3=1.0512;H4=0.4506;H5=0.6931;H6=0.6109;H7=0.6931;H8=0.5004;
计算证据的一致性:

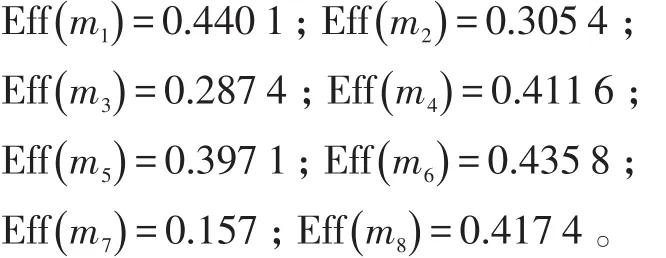
计算证据的有效性:
Step 4:冲 突 证 据 的 权 重[6]:w1=0.1627 ;w2=0.1149;w3=0.106;w4=0.1405;w5=0.1443;w6=0.1597;w7=0.0265;w8=0.1454。
Step 5:根据式(12)计算q′(θ) :q′(θ1)=0.06128;q′(θ2)=0.31688 ;q′(θ3)=0.62184。
根据式(13)得到合成结果:m(θ1)=0.06127;m(θ2)=0.31695;m(θ3)=0.62178。
由于m(θ3)=0.62178较大,其对应的故障为“d2”,诊断结果与实际处理结果一致。
5 结束语
本文针对导弹故障诊断出现的冲突情况,在分析经典的冲突证据合成规则与冲突证据权重分配方法的基础上,提出了一种基于证据有效性与证据可信度的改进冲突证据合成方法;最后,将该方法应用到导弹故障诊断推理模型上。实例验证结果表明,该模型能够解决导弹故障定位问题,且能有效地减少不确定性对导弹故障诊断的影响。
参考文献:
[1]阎桂林,徐廷学,袁有宏.再生分辨矩阵与决策熵的不完备决策系统属性约简[J].火力指挥与控制,2016,41(9):173-176.YAN GUILIN,XU TINGXUE,YUAN YOUHONG.Attributes reduction based on regenerative discernibility matrix and decision entropy in incomplete decision system[J].Fire Control&Command Control,2016,41(9):173-176.(in Chinese)
[2]OTMAN BASIR,XIAOHONG YUAN.Engine fault diagnosis based on multi-sensor information fusion using dempster-shafer evidence theory[J].Information Fusion,2007(8):379-386.
[3]吴宇恒,税爱社,路申易.证据理论在泵房过程故障诊断中的应用研究[J].自动化与仪器仪表,2017,29(3):154-156.WU YUHENG,SHUI AISHE,LU SHENYI.The application research on evidence theory in the fault diagnosis of pumps control system[J].Automatization and Instrument,2017,29(3):154-156.(in Chinese)
[4]ALTMCAY,HAKAN.On the independence requirement in dempster-shafer theory for combining classifiers providing statistical evidence[J].Applied Intelligence,2006(8):73-90.
[5]LIU HAIYAN,ZHAO ZONGGUI,LIU XI.Combination of conflict evidences in D-S theory[J].Journal of University of Electronic Science and Technology of China,2008,37(5):701-704.
[6]孙玮琢.模糊推理和证据理论融合的航空发动机故障诊断研究[J].电子科学技术,2017,4(2):62-64.SUN WEIZHUO.Research on aero engine fault diagnosis based on fuzzy reasoning and evidence theory[J].Electronic Science&Technology,2017,4(2):62-64.(in Chinese)
[7]MURPHY C K.Combining belief functions when evidence conflictive[J].Decision Support Systems,2000,29(1):1-9.
[8]战红,谭继文,薛金亮.基于信息熵与判断矩阵的D-S证据理论改进方法在故障诊断中的应用[J].北京工业大学学报,2013,39(8):1140-1143.ZHAN HONG,TAN JIWEN,XUE JINLIANG.Application of an improved dempster-shafer evidence theory based on information entropy and evaluation matrix to fault diagnosis[J].Journal of Beijing University of Technology,2013,39(8):1140-1143.(in Chinese)
[9]孙伟超,李文海,李文峰.融合粗糙集与D-S证据理论的航空装备故障诊断[J].北京航空航天大学学报,2015,41(10):1902-1909.SUN WEICHAO,LI WENHAI,LI WENFENG.Avionic devices fault diagnosis based on fusion method of rough set and D-S theory[J].Journal of Beijing University of Aeronautics and Astronautics,2015,41(10):1902-1909.(in Chinese)
[10]杨风暴,王肖霞.D-S证据理论的冲突证据合成方法[M].北京:国防工业出版社,2010:134-189.YANG FENGBAO,WANG XIAOXIA.Collision evidence synthetic method of D-S evidence theory[M].Beijing:National Defend Industry Press,2010:134-189.(in Chinese)
[11]SHAFER G.A mathematical theory of evidence[M].Princeton:Princeton University Press,1976:76-189.
[12]孙全,叶秀请,顾伟康.一种新的基于证据理论的合成公式[J].电子学报,2000,28(8):117-119.SUN QUAN,YE XIUQING,GU WEIKANG.A new combination rules of evidence theory[J].Acta Electronica Sinica,2000,28(8):117-119.(in Chinese)
[13]潘光,吴琳丽.一种改进的D-S证据合成方法及其应用[J].系统工程,2014,32(5):150-153.PANG GUANG,WU LINLI.A improvement D-S evidence theory synthetic method and its application[J].System Engineering,2014,32(5):150-153.(in Chinese)
[14]YAGER R.On the dempster-shafer framework and new combination rules[J].Information Sciences,1987,41(2):92-138.
[15]满江虹.基于粗糙集的分类知识发现方法及其应用研究[D].南京:东南大学,2005.MAN JIANGHONG.The research on the discovering method of classified information and its application[D].Nanjing:Southeast University,2005.(in Chinese)
[16]RONALD R YAGER.On the dempster-shafer framework and new combination rules[J].Information Sciences,1987,41:93-137.
[17]MURPHY C K.Combining belief functions when evidence conflicts[J].Decision Support Systems,2000,29(1):1-9.
[18]WANG J P,LIN S D,BAO Z F.Neural network and D-S evidence theory based condition monitoring and fault diagnosis of drilling[C]//Applied Mechanics and Materials.Switzerland:Transport Technology Publications Ltd.,2012:481-486.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
黑龙江大学自然科学学报(2022年1期)2022-03-29
一重技术(2021年5期)2022-01-18
小资CHIC!ELEGANCE(2022年1期)2022-01-11
福州大学学报(自然科学版)(2021年6期)2021-12-31
中学生数理化·高一版(2017年1期)2017-04-25
中学生理科应试(2016年7期)2016-05-14
理科考试研究·高中(2016年9期)2016-05-14
现代企业(2015年2期)2015-02-28