基于均匀性判定规则的统计MIMO雷达多通道融合检测技术
2018-04-25 07:05刘宁波陈小龙
海军航空大学学报 2018年1期
黄 勇,黄 涛,刘宁波,陈小龙
(1.海军航空大学,山东烟台264001;2.东华理工大学理学院,南昌330013)
统计MIMO雷达就是指空间分集的多输入多输出雷达[1-5],利用目标RCS的空间散射多样性来获取空间分集增益,从而提高雷达的目标检测能力。统计MIMO雷达中,每一个“发射-接收天线对”被称为一个空间分集观测通道,文中简称为观测通道或通道。大多数关于统计MIMO雷达目标检测技术的研究都是建立在各个观测通道统计特性一致的基础上[6-10],但是在统计MIMO雷达的实际工作环境下,很多因素都会导致各个观测通道统计特性的不一致[11],例如:
1)目标在不同观测通道中对应的信号传播距离不同,从而导致目标回波能量的差异;
2)由于观测视角的不同,不同观测通道中的目标RCS瞬时值不同;同时,若在每个观测通道中采取相参积累处理,则观测视角的不同还会导致多普勒的差异;
3)不同观测通道中的杂波功率水平和谱结构未必相同。
在每个观测通道都进行脉间相参积累与杂波抑制的前提下,上述影响因素导致的后果是各观测通道中获得的信杂噪比在统计意义上不一致,从而造成基于各通道统计一致性假设而设计的各类检测技术的性能下降。
针对各个观测通道统计特性的不一致,文献[11]提出了一种基于累积贡献率(Cumulative Contribution Rate,CCR)的广义似然比检测器,该检测器在每个观测通道中采用GLRT规则来形成局部检验统计量(Local Test Statistic,LTS)。之后,在融合中心,先将各个LTS按值大小降序排列,再从第一个LTS开始,依次累积LTS值,当累积值达到所有LTS值之和的一定“比例”时,将此累积值作为全局检验统计量(Gocal Test Statistic,GTS),本文中记为 TCCR检测器。文献[12]提出了一种双门限(Double Threshold,缩写为DT)检测器。首先,各通道的LTS进行第一门限检测,然后将超过第一门限的LTS传送到融合中心求和形成GTS,并与第二门限比较,得到最终的判决结果。该检测器是为降低融合中心与局部雷达站之间的数据传输率而设计的,也适用于各个观测通道统计特性不一致的情况。类似的技术还可参见文献[13]。本文中将该双门限检测器记为TDT检测器。文献[14]提出了一种基于各LTS信噪比加权的通道融合检测器。在已知各LTS信噪比的条件下,该检测器可以达到检测性能的上界,同时,文中还分析了存在信噪比估计误差时的检测性能。文献[15]提出了2种基于顺序统计量(Order Statistic,OS)的通道选择技术:一种是在事先估计或先验已知有效通道数量的前提下,对这些有效通道对应的LTS进行非相参积累,进而形成GTS,该文中简记为OS-GLRT检测器;另一种是采用或规则,对各种有效通道数量假设条件下得出的OS-GLRT检测器的判决结果进行融合,以克服OS-GLRT检测器对有效通道数量估计值比较敏感的问题,本文中将此检测器记为TMOS检测器。文献[16]利用各观测通道输出LTS之间的相关矩阵的特征分解,提出了主分量检测方法,只对那些具有较大特征值的有效通道进行非相参积累。这种方法需要估计通道间的相关矩阵,而且通常需要较高的信噪比才能准确地分离有效通道与无效通道。
上述文献针对各观测通道统计特性不一致的情况,利用不同的方法开展通道选择技术研究。这种情况下的通道选择需要解决2个问题。
第一是“希望选择具有较高信杂噪比的通道(或称有效通道)”,用这些通道输出的LTS来构建GTS。一般有2种选择思路:一是估计各个通道的信杂噪比,从而选择具有较大信杂噪比的通道;二是选择LTS值较大的通道。从理论上讲,前者的合理性高于后者,但是在实际操作中,前者比较复杂且信杂噪比估计未必准确,而后者易于理解且操作方便。本文选择后一种思路。
第二是“希望所选择的多个观测通道是均匀的”。其中,“均匀”借鉴了雷达目标检测领域均匀或非均匀杂波背景中的“均匀”二字,其含义是指这些观测通道输出的LTS之间是统计独立同分布的。于是,本文将雷达目标自适应CFAR检测中的参考距离单元杂波数据的均匀性判定规则[17-18]引入到有效通道选择中来,目的是选择一组均匀的LTS来构建GTS。
1 基于均匀性判定的统计MIMO雷达多通道融合检测器设计
假设统计MIMO雷达由M个独立观测通道组成,其中第i(i=1,2,…,M)个观测通道输出的LTS记为ℓi。由于本文研究的融合算法对ℓi的具体形式及其统计分布类型没有特别要求,因而文中不对ℓi本身进行讨论。但是考虑到多通道融合检测技术应当具有CFAR性质,所以本文要求ℓi具有CFAR性质。
一种多通道融合检测器如式(1)所示,记为TSUM,它是对各个观测通道输出的ℓi直接求和,适用于所有观测通道输出的ℓi统计一致的情况,其中检测门限为η0,H1表示“目标存在”的假设,H0表示“目标不存在”的假设。但是,正如前面所述,实际中各个观测通道输出的LTS并不一定统计一致,可能存在无效通道,从而降低了TSUM检测器的检测性能。为此,需要进行通道选择。
1.1 检测器设计步骤
基于均匀性判定的统计MIMO雷达多通道融合检测器的设计步骤如下。
1)对各个观测通道输出的LTS ℓi(i=1,…,M)按照从大到小的顺序进行排序,

2)按照如下步骤依次判断排序后的各LTS的均匀性,并构建GTS,记为TVI检测器。
首先,分析 ℓ(1),ℓ(2),…,ℓ(M)这M个 LTS 的均匀性,如果均匀,则GTSTVI如下所示,其中检测门限为ηM。

如果不均匀,那么就分析 ℓ(1),ℓ(2),…,ℓ(M-1)这前M-1个LTS的均匀性。如果均匀,则GTSTVI如下所示,其中检测门限为ηM-1。

依此类推,如果 ℓ(1)、ℓ(2)这前2个LTS不均匀,那么就分析ℓ(1)这1个LTS的均匀性。实际上不用判断了,因为1个LTS肯定是均匀的,此时GTSTVI如下所示,其中检测门限为η1。

本文采用文献[17]提出的变化指数(Variability Index,VI)来判定各LTS的均匀性。VI是一个二阶统计量,计算式为:

式(6)中:n表示2.1节步骤2)中所述的均匀LTS的数量;是n个均匀的LTS的方差估计值;̂是n个均匀的LTS的均值估计值;表示这n个均匀的LTS的算术平均值,n的取值范围是1,…,M。
通过将VI与门限KVI进行比较:

就可判断这n个LTS是否均匀。应当注意的是,这里引入了一个均匀性判定门限KVI,第3节将对KVI的取值范围及其对检测器性能的影响进行仿真分析。
1.2 检测门限的确定
1.1 节步骤2)中另一组需要确定的参数是检测门限η1,η2,…,ηM。下面来分析H0假设时,在给定算法虚警概率pfa的条件下,如何求解η1,η2,…,ηM。由1.1节给出的设计步骤以及全概率公式可知下式成立:

显然,式(8)中的最后一个求和项应当等于0。而其他各个求和项之间是互斥的,而且对于任意一次实验,式(8)中总有一个求和项对应的事件成立。因此,不妨假设在任意一个求和项描述的事件成立的条件下,其中均匀LTS之和大于检测门限的概率都相同,并将此概率记为ξ,如式(9)所示:

在式(8)的等号两边分别乘以ξ,即可看出本文提出的TVI检测器的虚警概率pfa就等于ξ。因此,要求解检测门限η1,η2,…,ηM,只需对式(9)中的每个等式进行求解。然而,很难给出解析表达式来求解η1,η2,…,ηM。本文将依据检测器设计步骤,通过Monte-Carlo仿真来求解。
2 仿真分析
本节仿真中采用9个独立观测通道,即,M=9。表1给出了仿真中采用的各观测通道输出信噪比的3种模型,其中,H0表示单个观测通道中的输出信噪比。模型1中,各个观测通道的输出信噪比都是相同的,故模型1表示均匀分布模型;相反,模型2和模型3表示了非均匀分布模型,模型2中前4个通道有效,后5个通道无效,而模型3中只有第1个观测通道有效。另外,为了便于仿真,本节假设H0条件下,每个通道输出的LTS服从均值为1的指数分布。

表1 输出信噪比在各个通道之间的分布模型Tab.1 Models of the output-SNR among observation channels
2.1 新检测器与已有的几种融合检测器的性能比较
本小节中,新检测器TVI将与TSUM检测器、TMAX检测器、TCCR检测器、TDT检测器以及TMOS检测器进行性能比较,其中TMAX检测器是指取所有观测通道输出LTS值的最大者作为GTS,TCCR检测器中的比例因子取值为85%,TDT检测器中的第一门限对应的虚警概率取值为0.01,TVI检测器的均匀性判定门限KVI取值为1.2。各个检测器的虚警概率为10-4。
图1给出了上述6个检测器在表1所列3种通道间信噪比分布类型下的检测性能。根据图1中3种通道间信噪比分布类型条件下6种检测器的性能对比,可得出结论。
1)在通道间信噪比均匀分布,即各观测通道统计特性一致的情况下,TSUM检测器是最优的,而TMAX检测器最差;而在通道间信噪比极度不均匀分布条件下,这2个检测器的性能对比则反过来。从这2个检测器的融合规则上很容易分析其原因,这里不再赘述。
2)在仿真给出的3种通道间信噪比分布类型条件下,本文提出的TVI检测器与这3种情况下各自的性能最优检测器的差别均小于0.5dB,其中均匀性判定门限KVI的取值均为1.2。这表明,TVI检测器具有较强的稳健性。
3)TCCR检测器的性能与TSUM检测器相差不大,这意味着TCCR检测器的性能在极度不均匀条件下有较大程度的恶化,尽管可通过调整TCCR检测器中累积贡献率的“比例”来改善其在这种条件下的检测性能,但这也反映出该检测器的稳健性较低。TDT检测器也有类似的现象,其检测性能与TMAX检测器相差不大,在均匀模型条件下有较大程度的性能恶化,通过调整TDT检测器的第一门限也能改善其在这种条件下的检测性能。
4)相比之下,TMOS检测器的性能虽比本文提出的TVI检测器稍差些,但相差不大,在这3种通道间信噪比分布类型条件下,其性能也比较稳健。但文献[15]提出的TMOS检测器存在虚警概率较难确定的问题,特别是当每个观测通道输出LTS的统计特性比较复杂时,即便是仿真分析也很难得出准确的虚警概率。
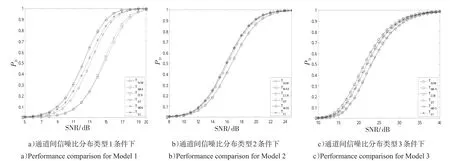
图16个检测器的检测性能对比Fig.1 Performance comparison among six detectors
2.2 新检测器在不同均匀性判定门限条件下的性能比较
图2给出了TVI检测器在表1所列3种通道间信噪比分布类型下的检测性能,其中KVI取值为1.1、1.2、1.3、1.4、1.5。由图2的仿真结果可知,KVI的值越大,表明均匀性判定规则越宽松,TVI检测器就越适用于通道间信噪比均匀分布的情况,反之就越适用于极度不均匀情况。应当注意的是,在本文仿真条件下,除了KVI=1.1在均匀分布情况时该检测器有较大的性能损失以外,KVI取其他值以及在其他通道间信噪比分布情况下,该检测器的性能差异并不大。因此,建议KVI的取值范围在1.2~1.4之间。

图2 TVI检测器在3种通道间信噪比分布类型下的检测性能Fig.2 Detection performance ofTVIdetector for three Models
3 结论
本文针对各观测通道统计特性不一致的情况,在将各个观测通道输出LTS降序排列的基础上,利用均匀性判定规则,选择一组均匀的、“被认为是具有较高信杂噪比”的LTS来构建GTS,从而形成了基于均匀性判定的统计MIMO雷达多通道融合检测器。文中给出了新检测器的设计步骤和均匀性判定规则,并利用全概率公式证明了新检测器的虚警概率与每一操作步骤中过门限概率的关系,从而为仿真得出检测门限提供了理论基础。最后,本文对比分析了6种多通道融合检测器的检测性能,以及不同均匀性判定门限条件下新检测器的检测性能。仿真分析结果表明,在不同通道间信噪比分布类型条件下,新检测器的检测性能具有较强的稳健性,且与不同条件下性能最优的检测器相比,其性能损失很小,约不到0.5dB。
参考文献:
[1]FISHLER E,HAIMMOVICH A,BLUM R S,et al.Spatial diversity in radar-models and detection performance[J].IEEE Transactions on Signal Processing,2006,54(3):823-838.
[2] JIAN LI.MIMO radar-diversity means superiority:A569374[R].America Gainesville Florida:University of Florida,2007.
[3]WILCOX D,SELLATHURAI M,RATNARAJAH T.Subspace methods and spatial diversity in radars[C]//Proceedings of the IEEE Radar Conference.Rome:IEEE,2008:1529-1533.
[4]HAIMOVICH A,BLUM R,CIMINI L.MIMO radar with widely separated antennas[J].IEEE Signal Processing Magazine,2008,25(1):116-129.
[5]FISHLER E,HAIMOVICH A,BLUM R,et al.Statistical MIMO radar:ADA433622[R].America:New Jersey Institute of Technology,Lehigh University,2004.
[6]TANG JUN,WU YONG,PENG YINGNING.Diversity order and detection performance of MIMO radar:a relative entropy based study[C]//Proceedings of the IEEE Radar Conference.Rome:IEEE,2008:1-5.
[7]FISHLER E,HAIMOVICH A,BLUM R,et al.Performance of MIMO radar systems:advantages of angular diversity[C]//Proceedings of Thirty-Eighth Asilomar Conference on Signal,Systems and Computers.NewYork:IEEE,2004:305-309.
[8]DU C,THOMPSON J,PETILLOT Y.Predicted detection performance of MIMO radar[J].IEEE Signal Processing Letters,2008,15(1):83-86.
[9]NIKOLAUS L.Some contributions on MIMO radar[D].Ewing,New Jersey:New Jersey Institute of Technology,2007:30-74.
[10]GUAN JIAN,HUANG YONG.Detection performance analysis for MIMO radar with distributed apertures in Gaussian colored noise[J].Science in China:Information Sciences,2009,52(9):1689-1696.
[11]HU QINZHEN,SU HONGTAO,ZHOU SHENGHUA,et al.Target detection with SNR diversity for distributed MIMO radar[C]//Proceedings of 2015 IEEE Radar Conference.Johannesburg,SouthAfrica:IEEE,2015:87-90.
[12]胡勤振,杨芊,苏洪涛,等.分布式MIMO雷达双门限GLRT CFAR检测[J].西安电子科技大学学报:自然科学版,2016,43(4):29-33.HU QINZHEN,YANG QIAN,SU HONGTAO,et al.Double-threshold GLRT CFAR detection in distributed MIMO radar[J].Journal of Xidian University,2016,43(4):29-33.(in Chinese)
[13]胡勤振,苏洪涛,周生华,等.多基地雷达中双门限CFAR检测算法[J].电子信息学报,2016,38(10):2430-2436.HU ZHENQIN,SU HONGTAO,ZHOU SHENGHUA,et al.Double threshold CFAR detection for multisite radar[J].Journal of Electronics&Information Technology,2016,38(10):2430-2436.(in Chinese)
[14]周生华,刘宏伟,刘保昌.信噪比加权空间分集雷达目标检测算法[J].西安电子科技大学学报:自然科学版,2011,38(4):82-88.ZHOU SHENGHUA,LIU HONGWEI,LIU BAOCHANG.SNR weighting based target detection algorithm for spatial diversity radar[J].Journal of Xidian University,2011,38(4):82-88.(in Chinese)
[15]杨俭,曲长文,周强.基于通道选择技术的统计MIMO雷达CFAR检测器[J].现代雷达,2014,36(5):64-69.YANG JIAN,QU CHANGWEN,ZHOU QIANG.Statistical MIMO radar CFAR detectors with channel-selecting techniques[J].Modern Radar,2014,36(5):64-69.(in Chinese)
[16]戴喜增,彭应宁,汤俊.MIMO雷达检测性能[J].清华大学学报:自然科学版,2007,47(1):88-91.DAI XIZENG,PENG YINGNING,TANG JUN.Detection performance of MIMO radar[J].Journal of Tsinghua University:Science and Technology,2007,47(1):88-91.(in Chinese)
[17]MICHAEL E SMITH,PRAMOD K VARSHNEY.Intelligent CFAR processor based on data variability[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(3):837-847.
[18]何友,关键,孟祥伟,等.雷达目标检测与恒虚警处理[M].2版.北京:清华大学出版社,2011:132-136.HE YOU,GUAN JIAN,MENG XIANGWEI,et al.Radar target detection and CFAR processing[M].2nd ed.Beijing:Tsinghua University Press,2011:132-136.(in Chinese)
猜你喜欢
测控技术(2022年4期)2022-04-27
现代仪器与医疗(2022年1期)2022-04-19
汽车实用技术(2022年4期)2022-03-07
北京理工大学学报(2021年12期)2022-01-13
雷达科学与技术(2021年5期)2021-11-29
西南交通大学学报(2021年5期)2021-10-31
舰船电子对抗(2020年1期)2020-04-27
兵器装备工程学报(2020年3期)2020-04-22
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
北京航空航天大学学报(2019年9期)2019-10-26