基于慧鱼模型的商品封箱流水线的设计与制作
2018-04-23 07:08周叙荣刘天军杨步超胡佳伟庄宝张健
常州工学院学报 2018年1期
周叙荣,刘天军,杨步超,胡佳伟,庄宝,张健
(1.常州工学院机械与车辆工程学院,江苏 常州 213032;2.河海大学机电工程学院,江苏 常州 213022;3.常州工学院数理与化工学院,江苏 常州 213032)
0 引言
慧鱼创意组合模型(Fischertechnik,以下简称慧鱼模型)是一种展示机械原理和机械加工过程的理想教具,可以提高学生的学习兴趣和创新能力[1-5]。慧鱼模型来源于德国的工程技术类智趣拼装模型,汇聚了设计师的创意,可以拼装成一般工程机械制造所需要的各种型号和规格的零件并可进行多种组合,制成各种动作模型,特别是机械模型。
本文利用慧鱼模型,针对长方体瓦楞纸箱的包装,在已有商品包装机械基础上进行了新的设计。以节省人力、节能环保为出发点,以流水线的形式完成纸箱合盖及封胶等一系列步骤,提高了包装过程的自动化程度。
1 商品封箱流水线主要功能及工作原理
商品封箱流水线如图1所示,能够完成商品装箱后顶部四面合盖及贴胶带等一系列封箱动作。该装置综合运用机械原理、机械设计、传感器技术和机电控制技术,采用多种机构传动方式,如齿轮齿条传动、蜗轮与蜗杆传动、带轮传动、气压传动等,实现了纸箱合盖、封箱的目的。
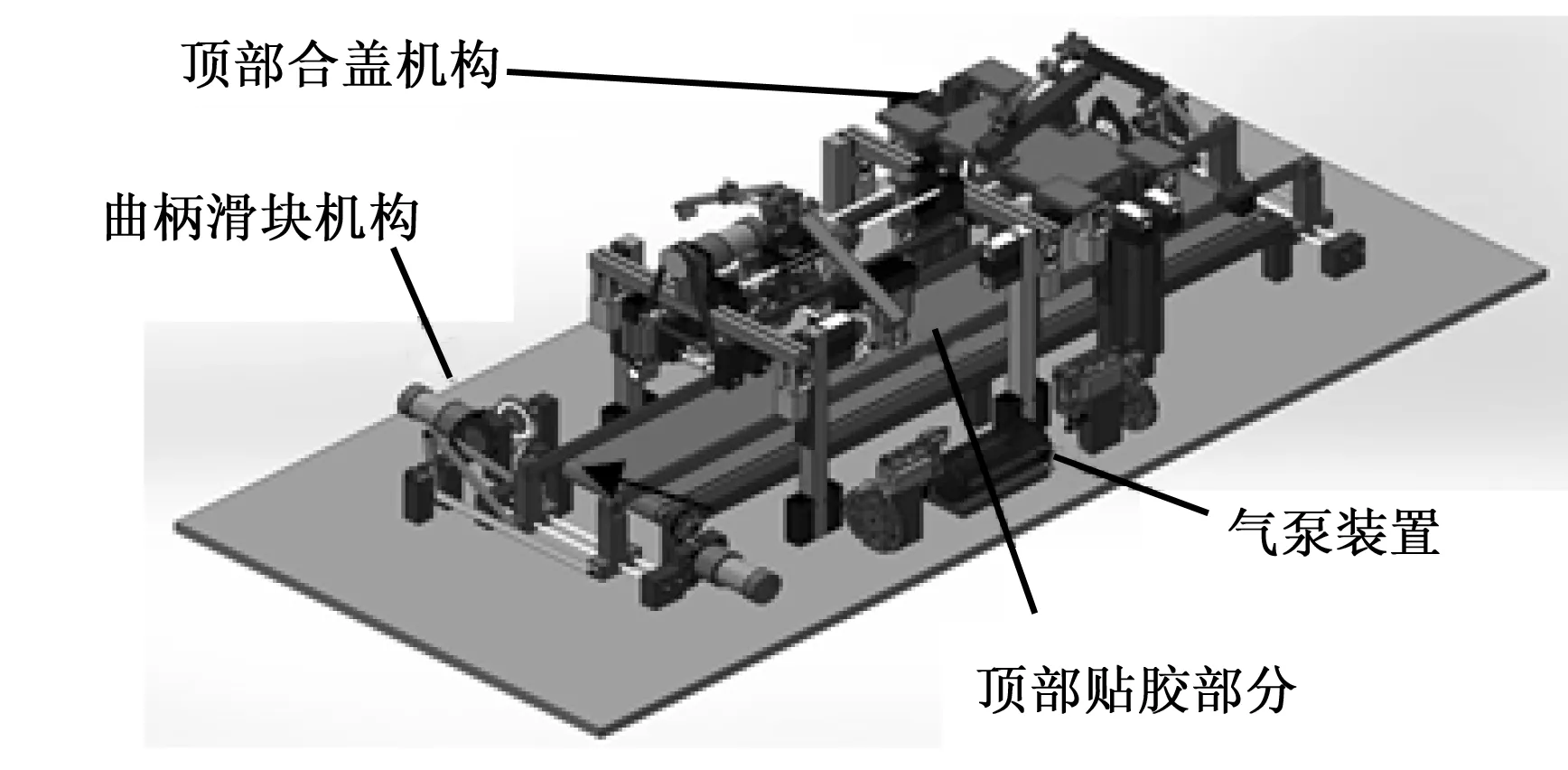
图1 商品装箱流水线
1.1 曲柄滑块机构
曲柄滑块机构(如图2所示)用慧鱼零件中的凸轮作为曲柄,连接发动机转动,同时通过连杆带动两个滑块作相对运动,即实现夹紧与松开的动作,以保证放在轨道上的箱体始终在轨道的中央,有利于完成后续动作。
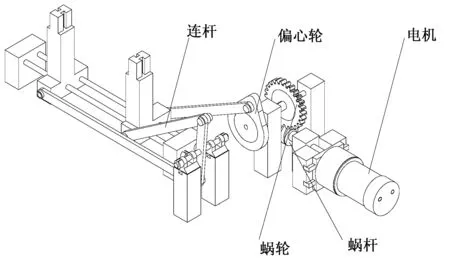
图2 曲柄滑块机构
1.2 顶部合盖机构
顶部合盖机构(如图3所示)主要由气锤、支撑所用的柱与支架以及升降台等构成。
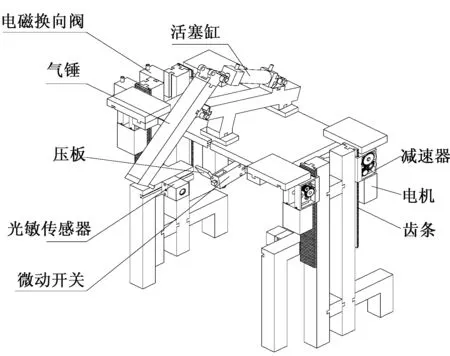
图3 顶部合盖机构
当装好充填物和商品的纸箱凭借传送带与纸箱底面的静摩擦力,随传送带向前移动到气锤下方时,触动光敏传感器,传送带停止运转。此时气锤随电机下降,气锤安装板下方的挡板压平纸箱的前盖。一旦挡板边上的限位开关触碰到纸箱棱边,气锤停止下降,同时,通过电磁气阀控制储气罐内气体向气缸输送的通断,带动气缸活塞前后往复运动,实现一端与活塞杆相连且铰接在气锤安装板上的气锤作圆周运动,使纸箱后盖也合上。接下来传送带开始向前运转,纸箱向前移动,安装板下倾斜的压杆给纸箱两边侧盖施加力的作用,使两侧盖向中间合上。
1.3 顶部贴胶机构
顶部贴胶机构(如图4所示)主要由移动刀架、升降简易平台、气动刀片、气动双侧合盖和胶带拉伸机构组成。
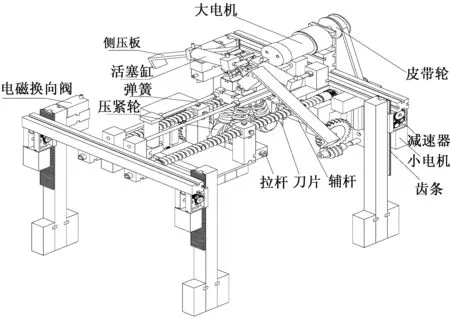
图4 顶部贴胶机构
在顶部合盖机构下降时,顶部贴胶机构也跟着一同下降,当顶部合盖完成后,纸箱继续随传送带向前移动,到达弹簧正下方停止。为了防止纸箱两侧盖再次弹起,气缸里的活塞杆驱动侧压板使纸箱两侧盖保持合上状态,此时大电机正转通过皮带带动丝杠、拉杆向辅杆靠近,缠上胶带后大电机反转带动丝杠拉出胶带,拉出预定长度后停止,整个机构下降,弹簧压缩使胶带紧紧贴在纸箱上。活塞杆末端的刀片在气压驱动下切断胶带。顶部合盖机构和顶部贴胶机构上升复位,传送带将封装好的纸箱传送至指定位置后停止,完成纸箱的顶部合盖及贴胶工作。
1.4 气泵装置
气泵装置(如图5所示)包括气罐、单向气缸、双向气缸、电磁气阀等。本装置利用一根皮筋与转盘作为电机输出,带动单向气缸打气,通过气管输送到电磁气阀,然后通过TX控制板控制电磁气阀的通断实现预期功能。

图5 气泵装置
电磁气阀是一种电动元件,接控制器的输出端,通过控制电磁线圈的通电与断电来控制气路的通断,它有P、A、R三个连接段和打开、关闭两个位置,即2位3通阀,其优点是反应迅速,易于达到精确控制的要求。
2 集成控制部分
程序控制部分是商品封箱流水线的灵魂。程序用 ROBO Pro软件编制[6],它是一种模块化、图形化编程语言软件,简洁、直观、易懂[7],可以精确控制“慧鱼”模型的动作,还可以提供编程前的硬件快速测试、在线检测、在线调试、下载操作等功能。
顶部合盖机构(程序如图6所示)运动过程由时间控制电磁换向阀通断实现活塞杆伸出与收回,从而带动气锤运动,压下前段挡板,再由平台下端凸起压下后段挡板,再通过传送带的移动压下两侧挡板完成合盖。
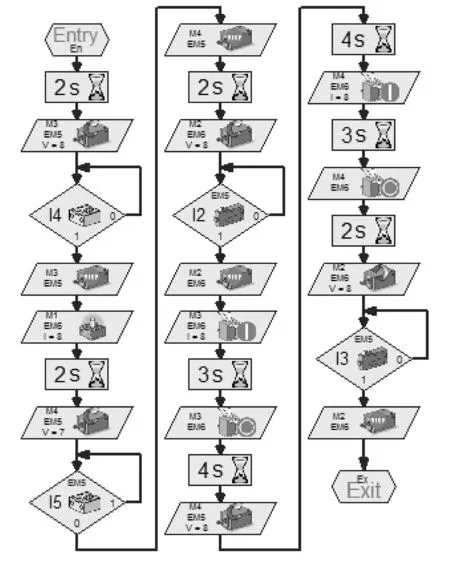
图6 顶部合盖机构程序图
顶部贴胶部分(程序如图7所示)通过光感触动电机旋转,带动丝杠转动拉出胶带,直到经过
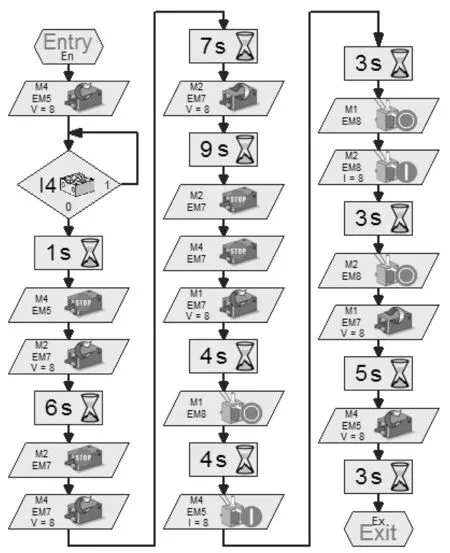
图7 顶部贴胶机构程序图
预定的时间,胶带拉伸至合适的长度,电机停止。然后升降台降下并压紧胶带,再由刀架切断并压实侧边的部分。
图8为包装计数功能的程序图,完成一次包装过程的最后顶部封箱的动作后,触发最后的光感,完成一次计数,一次计数为一件货物,该程序就可以统计数量,以便准确把握包装物品数量。
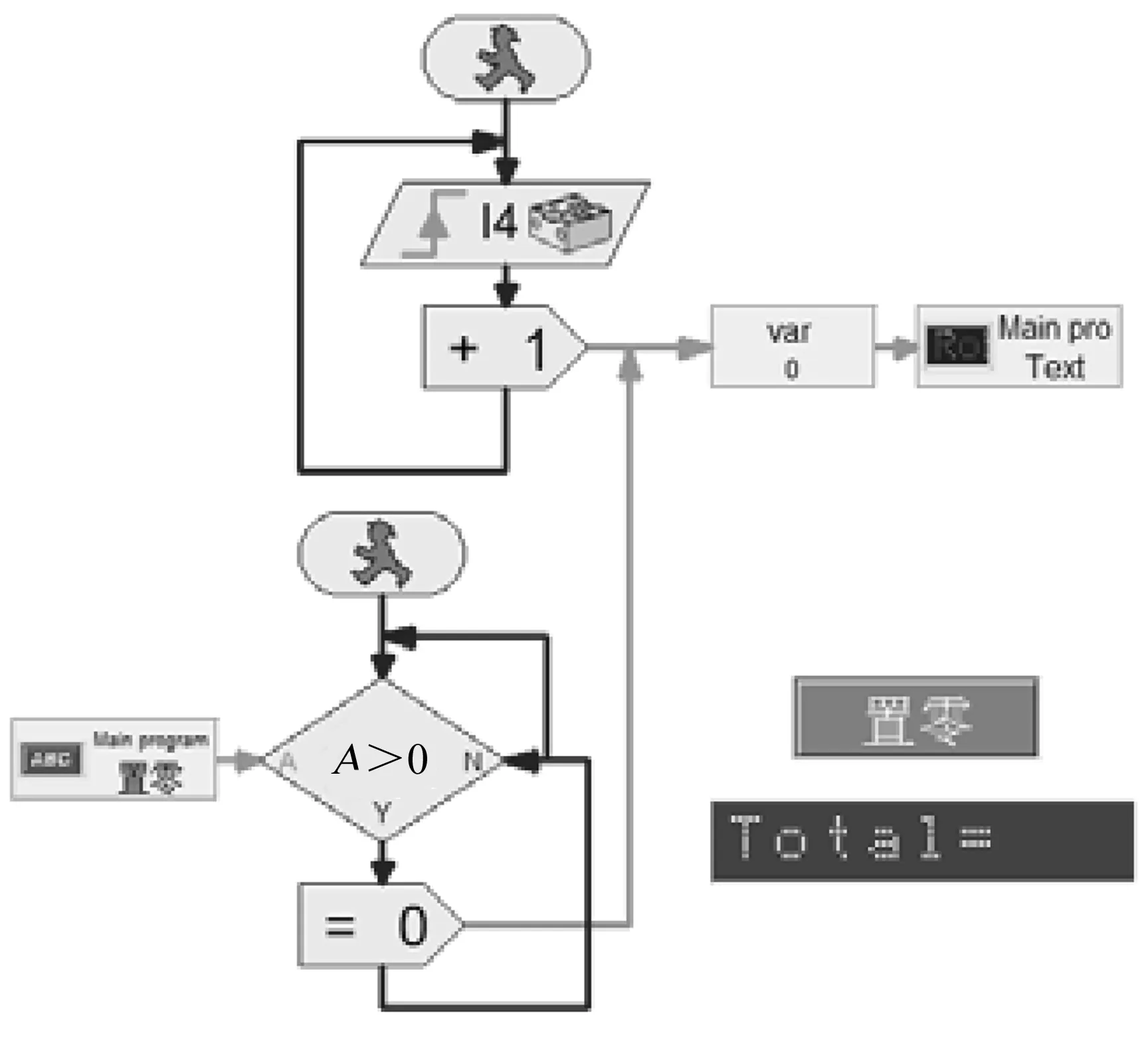
图8 包装计数功能程序图
3 结语
利用慧鱼模型设计了商品封箱流水线制作,并对其进行了仿真与验证,结果方便可行。但尚未制作实物样机,其实用性、正确性有待于实践的检验,特别是实际使用中封盖与贴胶部分有待验证,相关问题得到妥善解决后,将有利于该产品投入实践应用之中。
[参考文献]
[1]曲凌.慧鱼创意机器人设计与实践教程法[M].上海:上海交通大学出版社,2007.
[2]刘天军,毛建秋,支波浩,等.基于“慧鱼”创意组合模型的避障机器人的设计与制作[J].常州工学院学报,2012,25(2):6-9.
[3]肖红.基于慧鱼技术的六足昆虫仿生机器人的设计[J].荆门职业技术学院学报,2006,21(3):18-20.
[4]窦艳涛,黄豪杰,李健,等.基于慧鱼技术的家用洗碗机方案设计[J].实验室研究与探索,2013,32(3):31-33.
[5]段振华,吴张永,吴喜,等.基于慧鱼模型的柔性制造生产线设计[J].重庆理工大学学报 (自然科学),2012,26(4):62-65.
[6]卢桂萍,何宇斌.基于慧鱼创意组合模型的车库门禁系统设计与实现[J].数字技术与应用,2013(4):208-209.
[7]郑轩,韩蕾.基于ROBO Pro的管道除渣机器人的设计[J].机电技术,2007,30(3):17-19.
猜你喜欢
数学小灵通(1-2年级)(2021年6期)2021-07-16
中学生数理化·高一版(2021年1期)2021-03-19
小学科学(学生版)(2020年2期)2020-03-03
小太阳画报(2019年3期)2019-06-11
中学教学参考·理科版(2016年11期)2017-06-08
童话世界(2017年8期)2017-05-04
创新作文(小学版)(2017年33期)2017-04-04
中国资源综合利用(2016年9期)2016-01-22
福建人(2015年10期)2015-02-27
自动化博览(2014年6期)2014-02-28