
快速转向推进器在动力定位系统中的应用
2018-04-23 03:53:34牟照欣
船电技术 2018年3期
杨 光,周 兴,牟照欣
(1.大连测控技术研究所 116013;2.武汉船用电力推进装置研究所 430064)
0 引言
动力定位船舶上通常配备有多个全回转推进器,推进器之间存在着水动力干扰的问题,通常采取设置推力禁区的办法使推进器避免落在推力损失较大的区域内[2]。此种方法可避免较大的推力损失,但通常也带来另一个问题,即推力优化分配求解时,推进器的角度落在禁区边界上,导致推力增大,甚至出现分配误差较大的情况。
一种快速转向推进器[3]可以使推进器在一个控制周期内跨过推力禁区,从而实现真正不受推力禁区设置影响的推力优化分配过程。
本文使用快速转向推进器,结合二次规划优化方法解决关于此类情况下的水动力干扰问题。
1 二次优化方法求解推力优化分配问题
二次规划算法要求约束条件为线性函数,然而对于全回转推进器,推力可行域为非线性函数,如果应用二次规划算法求解推力优化分配问题,需要对分线性约束条件进行线性化处理。推力变量采用扩展推力形式表达更为方便,因为此时ux和yu恰好为两个方向上的基变量,便于表示线性化处理后的约束条件。
Wit中介绍了全回转推进器的推力可行域进行多边形近似处理的方法,如图1所示,采用一个N边的正多边形近似代替圆形的推力可行域。其中θ为多边形相邻两个顶点到圆心连线的夹角,对于N多变形所构成的约束条件,可由式(1)表示:

式(2)中j代表N多边形边的编号,因为N与θj已知,所以多边形构成的约束条件均是关于x,y的线性约束。

图1 近似N边形线性可行域
将上述变量用推力变量替换,则可得到推力的线性化的不等式约束条件:

其中:

矩阵Cj包含了各个推进器中每个N边形构成的约束条件系数,rj代表了每个推进器的最大推力值。多边形边数越多时,多边形面积越大,多边形同原推力可行域相似度越高,但约束条件更多,计算程度相应地更复杂。
以上介绍到的线性约束条件仅仅考虑了推进器最大推力的限制,而实际上推进器的约束条件还包含有推进器推力大小变化率和推进器角度变化率的限制。将这些约束条件考虑在内,形成图2中阴影部分的推力可行域。
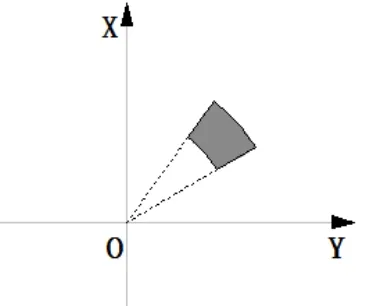
图2 全回转推进器可行域
2 快速转向推进器的干扰区处理
应用快速转向推进器时,推进器的旋转角速度增大,当在一个控制周期内推进器可以通过干扰区时,设置推力禁区是有效的处理策略。此时需要考虑推进器推力可行域的非凸问题,还要考虑线性化处理后可行域与原可行域间的误差问题。结合角度变化率约束与禁区角可知推力可行域为图3中几类情况:

图3 快速转向推进器结合禁区推力可行域
禁区角完全处于推力可行域范围内时,推力可行域被分割成两块,此时推力可行域为非凸区域,采用区域分割方法,将推力可行域视为两个子推力可行域,线性化处理后分别进行推力优化分配计算,取其中的最优结果作为推力变量的输出值。当推力可行域不与禁区相交时,推力可行域的范围较大,对推进器条件约束条件进行线性化处理时,误差会明显增加,如图4中(a)所示,推力可行域相当一部分被切除,直接计算的结果有可能不是最优解,此时同样需对推力可行域进行图4中(b)的线性分割,并在每个子区域内分别对子推力可行域进行线性化处理,分别进行推力优化分配计算,取其中的最优结果作为推力变量的输出值。
3 仿真结果与分析
为了验证上述关于水动力干扰方法处理策略的有效性,同样在一艘模型2上进行仿真实验验证,模型船在船尾布置两个全回转推进器,船首布置两个槽道推进器。

图5 模型船推进器布置图

表1 推进器技术参数


图6 快速转向推进器的禁区处理
本节中主要针对快速转向器的应用,在MATLAB仿真平台上进行仿真实验。仿真实验在一组典型控制力和力矩的条件下进行,仿真时间500 s,控制周期1 s。
图6中分配结果则表明了快速转向推进器处理干扰区域的有效性,快速推进器的角度变化率大于干扰区域的范围时,可在一个周期内直接跨过干扰区域,从而能快速响应控制力在方向上的变化。分配结果较好,各个推进器都能起到作用,能耗曲线则没有出现突变,较为平缓理想。
4 结束语
本文研究了快速转向推进器在动力定位系统推力优化分配中的应用,提出了处理快速转向推进器在推力优化分配中的非凸问题的策略。仿真结果说明了处理策略的有效性。
参考文献:
[1] 祝庆庆.海洋工程船推力分配策略[J].船舶科学技术,2013,35(5):21-24.
[2] 王芳.过驱动水面航行器的控制分配技术研究[D].哈尔滨工程大学,2012.
[3] 许林凯.动力定位推力分配混合策略研究[D].武汉理工大学,2015.
猜你喜欢
小学生学习指导(高年级)(2022年5期)2022-06-02 05:15:58
小学生学习指导(中年级)(2022年5期)2022-06-01 03:16:54
小学生学习指导(低年级)(2022年5期)2022-05-31 08:33:02
舰船科学技术(2021年12期)2021-03-29 01:28:38
中等数学(2020年2期)2020-08-24 07:58:46
测控技术(2018年9期)2018-11-25 07:44:24
当代陕西(2018年12期)2018-08-04 05:49:08
海外星云(2016年7期)2016-12-01 04:18:10
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32
