
基于改进数字PWM逆变器控制器设计
2018-04-23 03:53:47陈坤,周兴,文武
船电技术 2018年3期
陈 坤,周 兴,文 武
(武汉船用电力推进装置研究所,武汉 430064)
0 引言
随着超大规模集成电路技术和微处理器技术的快速发展,微处理器的性能飞速提高,成本价格不断下降,使得开关型电力变换装置的全数字化控制日益增多,数字控制技术逐渐成为市场上的主流。与传统的模拟控制器相比较,数字控制器具有抗干扰能力强、可靠性高、控制策略灵活、可实现很多复杂的新型算法等较为明显的优势[1]。但是,数字采样和离散化等过程也给电源输出响应的快速性和系统稳定性等带来了无法避免的影响[2-3]。特别是大功率逆变器具有高压、大电流的电气特性,这一特性决定了其功率器件IGBT不能工作于太高的开关频率[4],否则会烧毁功率器件。
近年来,船舶电力推进系统不断发展,推进系统的负载呈现出大功率、形式多样的特点,对船舶电站的功率需求、稳定性和可靠性等都提出了更高的要求,因此,中压交流(直流)综合电力系统已经成为了船舶电站发展的主流趋势[5],船上变频器、逆变电源等变流装置作为综合电力系统的重要组成部分,已经呈现出高压、大电流的特点。于是,由采样及数据更新频率低导致的输出响应时间延迟大等问题就显得越发的突出和不可忽视。本文分析了逆变器采样、PWM调制等环节的时间延迟,并为逆变器电源设计了基于一种改进数字PWM控制方法的控制器,以改善输出响应时间延迟。
1 系统采样、PWM调制等延时分析
如图1所示,逆变电源主回路采用H桥结构,控制器以DSP+CPLD为核心控制芯片,调制方式为单极性倍频PWM,采用对称规则采样。


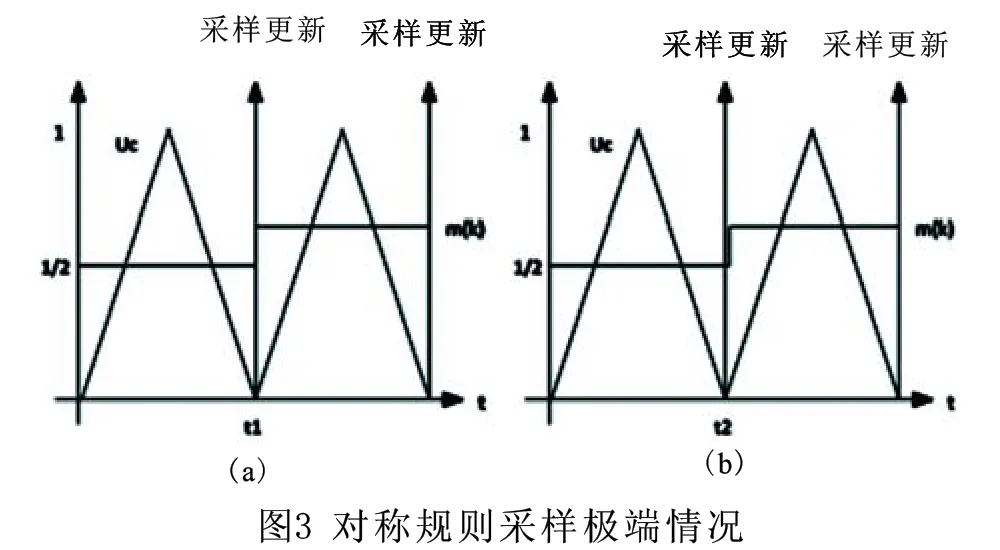
1.1 对称规则采样
对称规则采样方式采样周期Ts,亦即三角载波周期Tc。采用滞后一拍控制方式[6],以解决PWM调制占空比受限的问题[7]。即当前采样点采样后计算出的调制波控制量并不在当前采样周期进行数据更新,而是在下一个采样点更新该控制量数据(如图2)。于是与数据采样点时刻相比,数据更新点延迟了一个采样周期Ts。
图3(a)中,调制波控制量刚好在采样点t1时刻突变,控制量的突变会在下一个采样点进行数据更新,时间延迟为一个采样周期TS;而图3(b)中,采样点却刚好错过了控制量的突变点t2时刻,于是控制量的这一突变情况只有经过2个采样周期TS才能反映到负载侧。因此,数字PWM控制对称规则采样过程的时间延迟为TS~2TS.
1.2 单极性倍频PWM调制
对于单极性倍频PWM调制,调制波控制量m(k)分别与2路相对相移180°的三角载波信号Uc1和Uc2比较产生4路PWM脉冲信号ug1、ug2和ug4、ug3,分别驱动H桥的功率器件VT1、VT2和VT4、VT3,4路PWM驱动脉冲及m(k)与Uc1、Uc2的关系如表1。
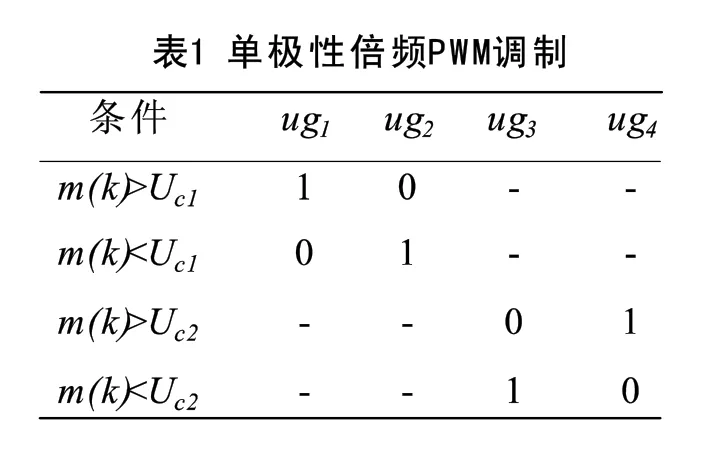
注:表中“1”表示高电平,“0”表示低电平。
如图4所示,功率器件VT1和VT4同时导通时,H桥输出电压+Ed,即图中的uo。

由图,从采样及数据更新点t1到H桥逆变器输出电压时刻t2之间有时间延迟,根据三角形相似原理有:

可得出时间延迟:

于是有

式中,tΔ为时间延迟,Tc为开关周期。
同理,功率器件VT2和VT3同时导通时,H桥输出电压-Ed,时间延迟范围为式(3)所示。
综合小节1.1和1.2的分析,对称规则采样和单极性倍频PWM调制的总时间延迟为
其中,TΔ为总时间延迟,TS为采样周期,对于对称规则采样即为开关周期Tc。
2 控制器设计实例及仿真
2.1 多次采样延时数据更新
由前面的分析,逆变器采样频率对于电源系统时间延迟有很大的影响,因此,提高采样频率对于减小响应时间延迟将会是一种行之有效的措施。而受功率器件功耗和温升等条件的限制,提高开关频率并不是件容易的事。于是,在开关频率不变的情况下,适度增加采样和数据更新次数就成为了最优的解决方案。
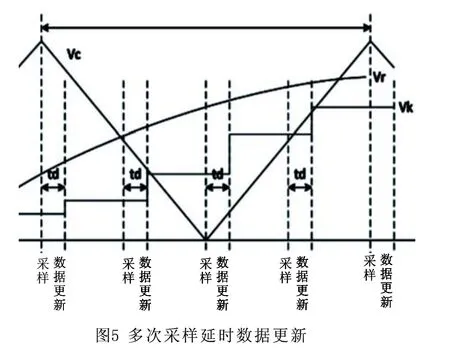
图5,基于传统数字PWM控制方式,多次采样延时数据更新方法有效结合了单次采样延时数据更新[7]和多次采样即时数据更新方法[8]的优点,在开关周期Tc内进行多次数据采样,延迟时间td(略大于DSP进行数据处理和运算的时间)后将控制量Vk更新到DSP或CPLD的比较寄存器中进行实时比较产生PWM驱动脉冲,采样数据在时间td内完成数据处理和PI控制等相关运算。
如此,逆变器的采样及数据更新周期将减小为原来的1/N,即TC/N,N为开关周期Tc内进行数据采样的次数。此时,数字PWM控制所引起的时间延迟为

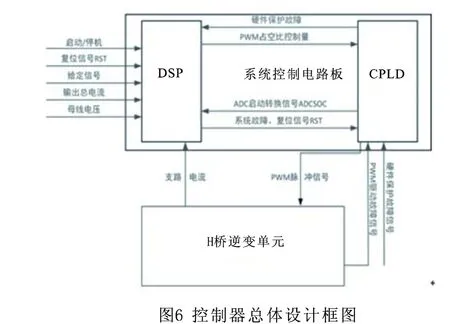
为了避免在非载波波谷点和波峰点更新数据而导致的PWM驱动脉冲电平错误和脉冲竞争现象[7,8]的发生,该控制器以DSP+CPLD作为核心控制芯片。DSP进行AD采样、数据处理、控制算法运算、故障检测及综合等方面的工作,而CPLD负责产生三角载波信号、比较匹配生成PWM脉冲、PWM信号死区时间、故障状态下PWM脉冲封锁等类似于DSP事件管理器EVA/B的功能。控制器总体框图如图6。
2.2 PI控制参数配置
逆变电源采用电流闭环控制方式,为阻感性负载提供快速变化的励磁电流。逆变器控制系统框图如图7,图中分别为PI控制器、从采样时刻到逆变器输出的时间延迟、PWM脉冲及逆变器主回路等效增益、并联H桥均流电感等环节的传递函数。

时间延迟环节对于所有的ω有


该延时环节只影响系统的相频特性,对于幅频特性没有影响。为了控制器设计和分析的方便,在满足条件1ωτ<<时,可对时间延迟环节作如下简化处理[9,10]

式中,τ为时间延迟。
将负载电压uo作为外部扰动,可得出系统输出电流Io闭环传递函数

根据式(8),系统的闭环特征方程为

该闭环特征方程为三阶,应该有3个闭环特征根,自动控制原理及工程实践的经验显示,对于高于两阶的系统,可以利用主导极点的概念将系统在可以允许的误差情况下进行降阶处理[11]:如果高阶系统中距离虚轴的距离最近的一对极点,其实部比其它极点的实部的1/5还要小,那么这对闭环极点称为主导极点,对系统的时间响应过程影响起主导作用[12,13]。若逆变电源系统能够找到这样一对共轭复数主导极点,则此系统就可近似地当作二阶系统进行分析,近似估计系统的暂态响应性能指标。
系统主导极点期望值为

式中,rξ为阻尼比,rω为无阻尼自然振荡角频率。
由式(9)(10)有
根据实际系统设计参数:阻尼比ξr=0.70,n取10,此时调整时间短,超调量不大,时间延迟τ= 6 4μs ,自然振荡角频率ωr=1842rad/s ,对应调节时间约为2.30 ms。计算得出

2.3 仿真分析
采用MATLAB软件对控制器设计进行仿真,以验证系统的特性。仿真参数:2个H桥逆变单元并联,母线电压Ed=100V,均流电抗器0.8 mH/4.5 mΩ,负载0.16 mH/1 mΩ,采用对称规则采样和单极性倍频PWM调制,开关频率5kHz,每个周期采样4次,取采样及运算时间延迟td=50μs。给定+80 A/10 Hz方波信号时,仿真输出波形如图8所示:
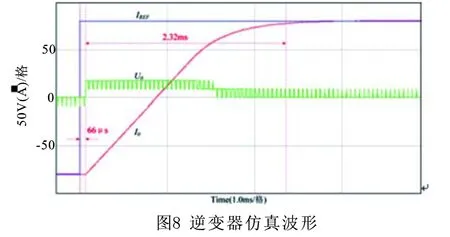
从逆变器仿真结果看,输出响应时间延迟66 μs,在理论分析的范围[50,112.5]内。输出电流I0从0上升到给定值的95%的上升时间为2.32 ms,与控制器设计的2.30 ms调节时间比较吻合,控制器响应速度快,具有较好的稳定性和暂态特性。
3 实验验证
实验主电路采用2个H桥逆变器单元并联(图9),以TI公司DSP28335结合ALTERA公司CPLD EPM1270T144C5为数字PWM控制器的核心芯片,调制方式单极性倍频PWM。逆变器直流母线电压Ed=100 V,IGBT为英飞凌FF300R12ME3,开关频率5 kHz,均流电抗器1600 μH/9 mΩ,负载 160μ H/1 mΩ。

为了简化程序编写和实验过程,设定时间延迟td为采样周期TS,分别在开关周期Tc内进行1次、2次、4次数据采样和更新,给定信号为方波电压信号,4V/10 Hz(给定电压与输出总电流对应关系为1V:20 A),逆变器输出信号(负载电流IO、负载电压uO)和给定信号IREF波形如图10所示。
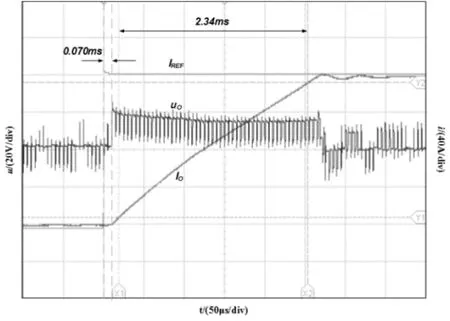
图11 N=4及设计PI参数时逆变器输出
图中CH2通道为负载电压uO,20V/格;CH3通道为给定信号IREF,40A/格;CH4通道为负载电流IO,40A/格。
在每个周期采样及数据更新4次的情况下,PI控制器采用式(12)所设计的PI参数,逆变器输出电流波形如图11所示,输出响应时间纯延时70 μs,输出电流从5%上升到95%所需要的时间为 2.34 ms。
控制器设计参数能满足逆变器电源系统在阻感性负载下对于稳定性和暂态特性的要求,而多次采样延时数据更新方法有效地减小了采样周期和数据更新周期,逆变器输出响应时间延迟从406μs减小为84μs,时间延迟改善效果明显。
4 结论
对于大功率逆变电源,对称规则采样、单极性倍频PWM调制等数字控制实现过程引入的响应时间延迟容易影响其输出特性,文中在传统数字PWM控制的基础上进行改进,设计了一个基于多次采样延时数据更新方法的逆变电源控制器,以提高采样频率和数据更新频率。最后,实验结果与理论分析相一致,证明了该控制器在响应时间延迟改善方面的实用性。
参考文献:
[1] 彭力.基于状态空间理论的PWM逆变电源控制技术研究[D].武汉:华中科技大学,2004.
[2] 彭力,张凯,康勇,等.数字控制PWM逆变器性能分析及改进[J].中国电机工程学报,2006,26(6):65-70.
[3] 单鸿涛.数字化过程对脉宽调制逆变电源性能的影响机理[J].中国电机工程学报,2009,29(6):29-35.
[4] 余勇.大功率电流型多重化变频电源系统控制与分析[J].中国电机工程学报,2004,24(12):24-28.
[5] 马伟明.舰船动力发展的方向——综合电力系统[J].上海海事大学学报,2004,14(1):1-11.
[6] 孔雪娟.数字控制PWM逆变电源关键技术研究[D].武汉:华中科技大学,2005.
[7]YANG ShuitaoZHANG Fan QIAN Zhaoming.DSP-based multiple-loop control strategy for UPS inverters with effective control delay elimination[J].Transactions of China Electrotechnical Society,2008,23(12):84-91.
[8] 刘春喜,孙驰,高姬.数字SPWM方法对系统延时的影响[J].电力自动化设备,2013,33(6):75-80.
[9] 刘春喜,马伟明,孙驰,等.大功率400Hz逆变电源数字控制设计[J].电工技术学报,2011,26(1):100-107.
[10]汤赐.基于LCL输出滤波器的并网逆变器四种PI控制器设计方法[J].电网技术,2013,37(11):3268-3275.
[11]Morris Driels. Linear control systems engineering[M].Beijing:Tsinghua University Press,2010.
猜你喜欢
自动化仪表(2020年10期)2020-11-13 03:31:00
大庆师范学院学报(2015年3期)2015-12-24 07:35:36
船舶力学(2015年6期)2015-12-12 08:52:20
中国光学(2015年5期)2015-12-09 09:00:42
现代医药卫生(2014年18期)2014-03-11 19:33:26
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15
汽车维护与修理(2014年10期)2014-02-28 12:15:01
河南科技(2014年23期)2014-02-27 14:19:00
