
下肢康复器设计与分析
2018-04-23 11:21高定刚马昕戴志杰黄加张王晨
中国医疗器械信息 2018年7期
高定刚 马昕 戴志杰 黄加张 王晨
1 同济大学磁浮交通工程技术研究中心 (上海 201804)
2 上海市复旦大学附属华山医院 (上海 200040)
3 上海致微医疗器械有限公司 (上海 201907)
在我国,随着人民生活水平的提高和人口老龄化的进程,发病与生活方式及年龄相关的脑血管疾病、神经系统疾病患者也随之增长,这类患者容易出现脑中风而无法正常行走[1]。另外,因交通运输、工程建设等事故造成神经损伤或者肢体损伤的人数越来越多。医学理论和临床医学证明,除了早期的手术治疗和必要的药物治疗外,正确、科学的康复训练对于肢体运动功能的恢复有非常重要的作用[2]。
目前,对于下肢康复训练的基本方法是理疗师对患者进行“手把手”的训练,这种康复训练周期长、费用高,患者经常因不能承担昂贵的医疗护理费用而停止康复训练。能够替代上述疗法的康复设备对于临床康复意义重大,但目前康复器设备国内处于技术研发阶段,还没有形成产品,国外康复设备开发也主要针对高端康复市场,产品完全智能化,价格昂贵[3]。因此,开拓便捷、经济的康复训练设备成为业界研究焦点。本文主要就下肢康复器设计、功能模式、机构优化等做一探讨,通过简洁的结构实现下肢康复设备的多种康复功能,同时,重点解决髋关节的屈伸运动问题。
1.人体下肢结构及运动
人体下肢骨分为下肢带骨和自由下肢骨。下肢带骨即髋骨,自由下肢骨包括股骨、髌骨、胫骨、腓骨及跗骨、跖骨和趾骨。下肢运动主要是髋、膝、和踝三个关节运动的合成结果[4]。作为普通人群而言,人体各个部位长度存在一定的比例,人体总高H,则髋关节至地面为0.530H,膝关节至地面0.285H,踝关节至地面0.039H。因此,大腿长度为0.245H,小腿长度为0.246H。为了康复器设备能够满足更大范围人群的使用,康复器关键部位的尺寸需要能够调节[4]。另外,人在正常步行的时候,髋关节摆动范围30˚向前弯屈和20˚向后伸展。
2.下肢康复器设计
一个下肢主要的自由度包括:髋关节3个自由度,膝关节1个自由度,踝关节3个自由度。在这些自由度中,大腿的屈伸是走行的基础,膝关节和踝关节屈伸是次要自由度。
2.1 总体结构
下肢康复器装置,包括:腰部结构、腰部辅助支撑机构、电动推杆系统、控制器及电源模块、腿部支撑及其他附件。见图1。
腰部结构包括:主体结构、竖向安装基础、横向安装基础、绑扎带,主结构采用高分子材料;竖向安装基础安装在主体结构两侧;横向安装基础安装主体结构上,起到增加主体结构刚度以及提供安装基础的作用;绑扎带安装在竖向安装基础上,把结构绑扎到身体上。
腰部辅助支撑机构通过髋关节解锁装置与腿形成解开或锁闭,完成对髋关节运动的释放或约束。
电动推杆系统分别与大腿及腰部的横向安装基础铰接,通过电机的转动实现推杆的伸缩。
控制器包括运算与通信模块、数据采集模块和控制输出模块;电源模块是对电动推杆系统以及控制器供电。
腿部支撑结构,包括:大腿、小腿、大腿与小腿锁定机构。大腿与小腿正常情况下为1个自由度的转动,可通过对大腿与小腿锁定机构的解开以及锁闭,实现小腿和大腿铰接或固接。

图1. 方案结构

图2. 无源保护模式走行姿态

图3. 有源辅助模式
2.2 康复训练模式
2.2.1 无源保护模式
解锁电动推杆系统与结构的连接。锁定髋关节锁销,使腿与腰部辅助支撑机构形成固接,腰部辅助支撑机构产生作用。在直立状态下,由于腰部辅助支撑机构左右对称性,身体的前倾及后仰都会受到约束。行走状态下,由于腰部辅助支撑机构的限制,迈出腿与腰部只能一起运动,不会发生相对转动。因此,康复机构不但垂向支撑了身体重量,而且增加了腰部与腿部的保护,更有利于康复患者的走行康复训练。另外,大腿与小腿锁定机构,可以锁闭,大腿与小腿转动自由度锁定,更有利于康复患者的支撑。无源保护模式走行姿态见图2。
2.2.2 无源无保护模式
解锁电动推杆系统与结构的连接,解锁髋关节锁销,使驱动机构以及腰部辅助支撑机构都不发生作用。腰部和大腿之间形成完全自由的转动自由度。康复患者的身体重量由康复器支撑,但是运动关节之间的运动控制完全由患者掌握。另外,根据实际需要调节大腿与小腿锁定机构,形成转动和锁定两种状态。这种模式给患者更大的运动自由度,比较适合康复后期的训练。
2.2.3 有源辅助模式
采用电机带动丝杠方式传动,这种方式技术成熟、运动精度高、经济性好。考虑“仿生”因素,驱动器布置需要考虑肌肉在人腿上相对位置。选择身体支撑距离150mm,大腿支架位置300mm的位置点作为驱动结构的安装位置,因此初始驱动结构长度335.4mm。有源辅助模式下,解锁电动推杆系统与结构的连接,解锁髋关节锁销。康复器为患者提供垂向支撑、腰部转动保护、向前运动的驱动力(见图3)。
3.结构分析
有限元模型强度分析,采用ANSYS软件建模。在所有载荷中,人体的垂向支撑是最主要的载荷,考虑人体处于单腿支撑状态作为分析工况,支撑重量考虑981N。由于载荷主要通过单边传递,采用一半模型建模,结构采用Shell181,连接部分采用Beam188划分网格[5]。其材料参数见表1。
在模型中加载981 N竖直向下的载荷,踝关节是与地面相接触的部位,踝关节采用全约束。限制其x、y、z 3个方向的自由度[6]。

表1. 材料参数表
结论:与身体结合的尼龙结构是一个开口结构,其刚度对支撑铝合金结构有较大影响,初始设计尼龙厚度为3mm,其结构变形较大,导致结构应力达到105MPa。增加尼龙厚度到5mm,支撑铝合金结构应力下降到83MPa。因此,尼龙厚度选用5mm。优化后,铝合金应力为83MPa远小于铝合金的屈服强度260MPa,支撑结构强度满足要求;尼龙结构局部应力17MPa也小于抗弯曲强度为67MPa,尼龙结构强度满足要求。见图4~7。
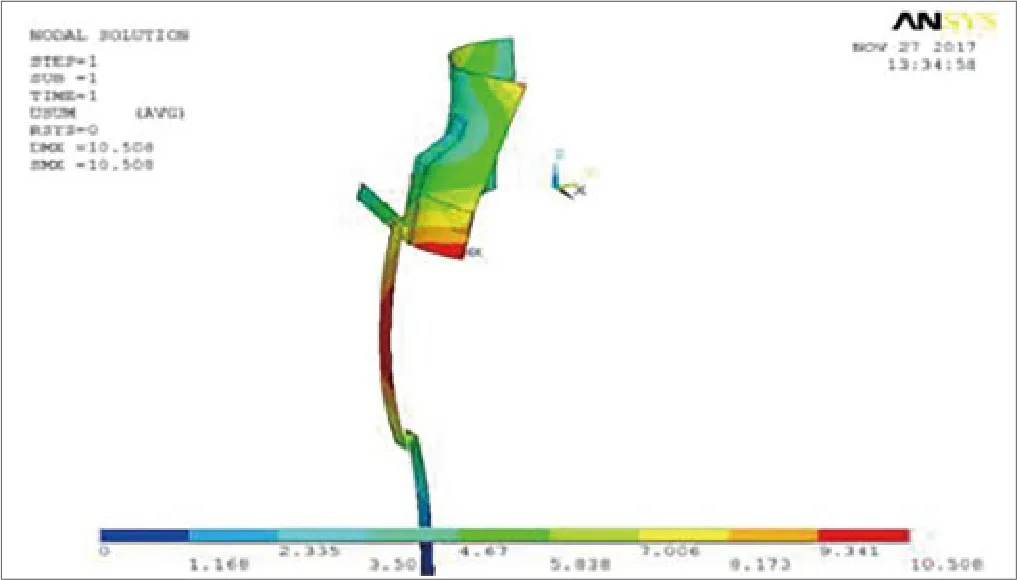
图4. 结构变形(尼龙厚度3mm)
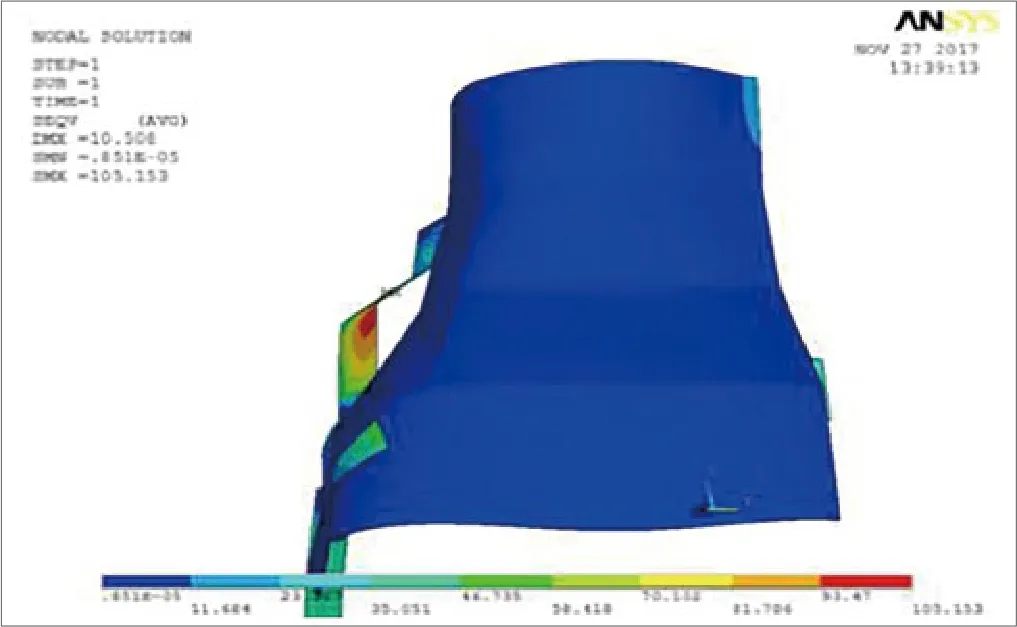
图5. 结构Von Mises应力(尼龙厚度3mm)

图6. 结构Von Mises应力(尼龙厚度5mm)

图7. 尼龙Von Mises应力(尼龙厚度5mm)
4.小结
本研究完成了下肢康复器设计,并且实现了多功能要求,包括无源保护模式、无源无保护模式及有源辅助模式,能满足不同康复患者需求以及不同阶段的康复计划;通过结构强度以及刚度分析,对系统结构进行了优化,优化后的结构满足强度要求;康复器结构简洁、轻便,实用性、经济性较好。
[1] 尹军茂. 穿戴式下肢外骨骼机构分析与设计[D]. 北京: 北京工业大学,2010.
[2] 吕广明, 孙立宁, 彭龙刚. 康复机器人技术发展现状及关键技术分析[J]. 哈尔滨工业大学学报,2004,36(9):1224-1227.
[3] 史小华, 王洪波, 等. 外骨骼型下肢康复机器人结构设计与动力学分析[J]. 机械工程学报,2014,50(3):41-48.
[4] 牛彬. 可穿戴式的下肢步行外骨骼控制机理研究与实现[D]. 浙江: 浙江大学,2006.
[5] 王新敏, 李义强, 许宏伟.ANSYS 结构分析单元与应用[M]. 北京: 人民京交通出版社,2011.
[6] 赵彦峻, 葛文庆, 刘小龙, 等. 外骨骼机器人设计及其机械结构的有限元分析[J]. 机床与液压,2016,44(3):10-13.
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
机械制造(2022年3期)2022-04-07
中国临床医学影像杂志(2019年6期)2019-08-27
小学科学(学生版)(2019年7期)2019-08-01
中国核电(2017年1期)2017-05-17
舰船科学技术(2016年1期)2016-02-27
科学启蒙(2015年9期)2015-09-25
红领巾·萌芽(2015年5期)2015-06-16
少年科学(2015年4期)2015-05-07
