无人机遥控链路跟踪式干扰开机策略研究
2018-04-19 01:20:21刘瑞麒姚志成龚博文
电光与控制 2018年4期
刘瑞麒, 姚志成, 杨 剑, 龚博文, 胡 猛
(火箭军工程大学,西安 710025)
0 引言
近年来,非法无人机的泛滥对各类重要场所的安保提出了新的挑战,各国针对非法无人机的管控展开了相关研究,提出以干扰无人机遥控链路为主要方式的电磁对抗手段并进行了研发。其中,美国Battelle公司研发的Drone Defender电子干扰枪、英国Blighter公司研制的反无人机防御系统(AUDS)、国内矩阵电子技术公司推出的ADS2000反无人机干扰枪等都采用对
无人机遥控数据链路进行全时段全频段压制干扰方式,其虽然能够实现干扰效果,但是大功率宽带阻塞干扰及全时段开机所带来的功率浪费及对周围环境的影响,成为制约无人机干扰设备效能提升的突出问题[1-4]。
无人机遥控数据链路一般采用跳频通信方式,跟踪式干扰是针对此类信号干扰效率较高的方式[5],能够减少干扰功率浪费[6]。当侦测设备探测并分选出目标无人机的跳频信号并掌握无人机及遥控发射机的位置时,干扰设备能够对其实施跟踪式干扰。同时,由于干扰范围有限,若能结合干扰范围对干扰机开机策略进行设计,就能够进一步节省功率并降低干扰信号对环境的影响[7]。
针对跟踪干扰有效范围确定问题,文献[8-9]对干扰椭圆方程进行了推导,并讨论了干扰椭圆在不同条件下的应用问题,解决了在信号源与接收机位置固定情况下干扰机的合理位置布置问题,但当接收机位置发生变化时,干扰椭圆也随之变化,因而此方法不能求取在无人机位置变化情况下的干扰范围;文献[10-11]针对海上跳频通信抗干扰问题,推导出了抗干扰双曲线方程,解决了干扰机、信源、接收机在同一个平面且位置相对固定情况下干扰无效区域的求解问题,但未解决在三维空间中,目标接收机位置不断变化时有效干扰区域确定问题。同时,实现有效干扰还需要接收机处干信比大于干扰阈值[12],由于干扰信号与遥控信号功率有限,在传播过程中的损耗会使满足干信比条件的范围发生变化[13],因而还需要对有限功率下干扰范围进行分析,最终根据干扰范围确定出开机策略。
基于此,本文针对不同侦测信息下无人机遥控链路跟踪式干扰开机策略制定问题,分别从跟踪式干扰需满足的时域条件及功率条件出发,对干扰双曲面及有限功率干扰范围不等式进行推导以确定干扰范围,进而对干扰开机策略进行分析,最后结合仿真实验对开机策略进行了分析验证。
1 遥控链路干扰机理
无人机的遥控系统由遥控器与接收机组成(见图1),遥控器中射频芯片在主控芯片控制下生成跳频遥控信号,接收机接收跳频遥控信号由射频接收芯片解调后得到数据码,经由主控芯片识别后向无人机发送遥控指令[14]。
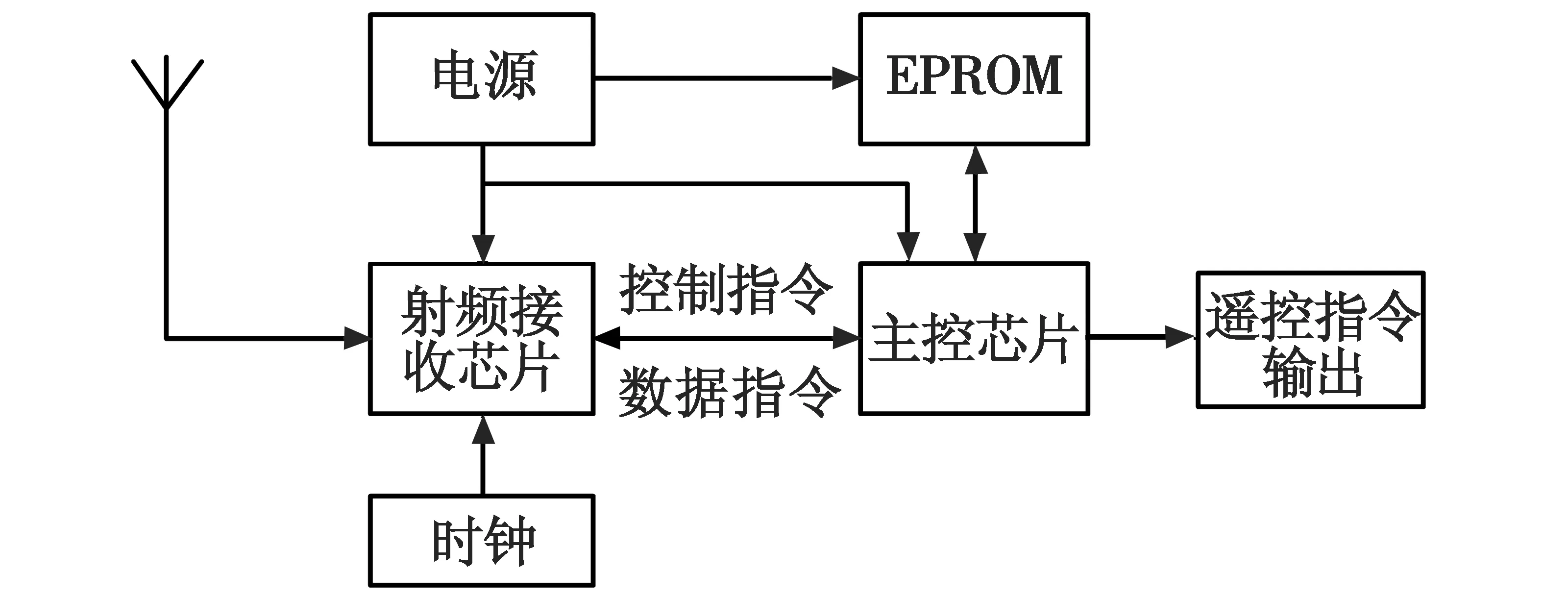
图1 遥控接收机结构图Fig.1 Structure of remote-controlled receiver
跟踪式干扰是一种干扰信号频率跟随跳频信号跳变的干扰方式[15],由于其能跟踪跳频信号的频点进行干扰,因而能实现利用瞬时频谱较窄的信号达到干扰目的[16],其原理如图2所示。
当干扰信号跟踪上跳频信号时,干扰信号就会同跳频信号一起进入接收机射频芯片,当干扰信号功率远大于接收机灵敏度时,会使接收机前端工作于非线性区域,导致接收到的有用信号增益降低,形成阻塞干扰;当干扰信号功率较小时,窄带干扰信号与被干扰信
号叠加后被送入解调器中,使解调器难以解出正确信号并产生误码[17]。
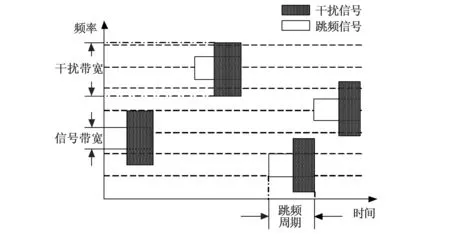
图2 跟踪干扰示意图Fig.2 Schematic diagram of follower jamming
2 无人机跟踪干扰有效范围的确定
有效的干扰范围由满足跟踪干扰时域条件及功率条件下的范围共同确定。如图 2所示,跟踪式干扰的实施在时域上需要干扰信号在到达目标时能覆盖目标信号。同时,由于信号传播过程中的损耗会使满足干扰有效干信比条件的范围发生变化,需结合信号在自由空间的传输损耗来确定功率覆盖范围。
2.1 干扰双曲面公式推导及有效范围讨论
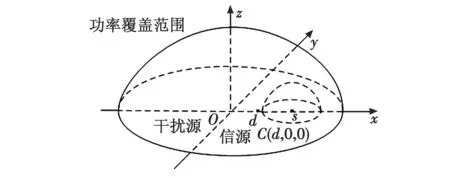
假设已知信源位置固定且其与干扰源距离为d,干扰源采取固定方式布置,无人机在遥控范围内自由运动。以干扰源为原点,建立如图3所示的空间直角坐标系,并结合实际情况取x,y,z,d∈R且z,d≥0(由于信源固定,且坐标系建立任意,因而可以取d>0)。
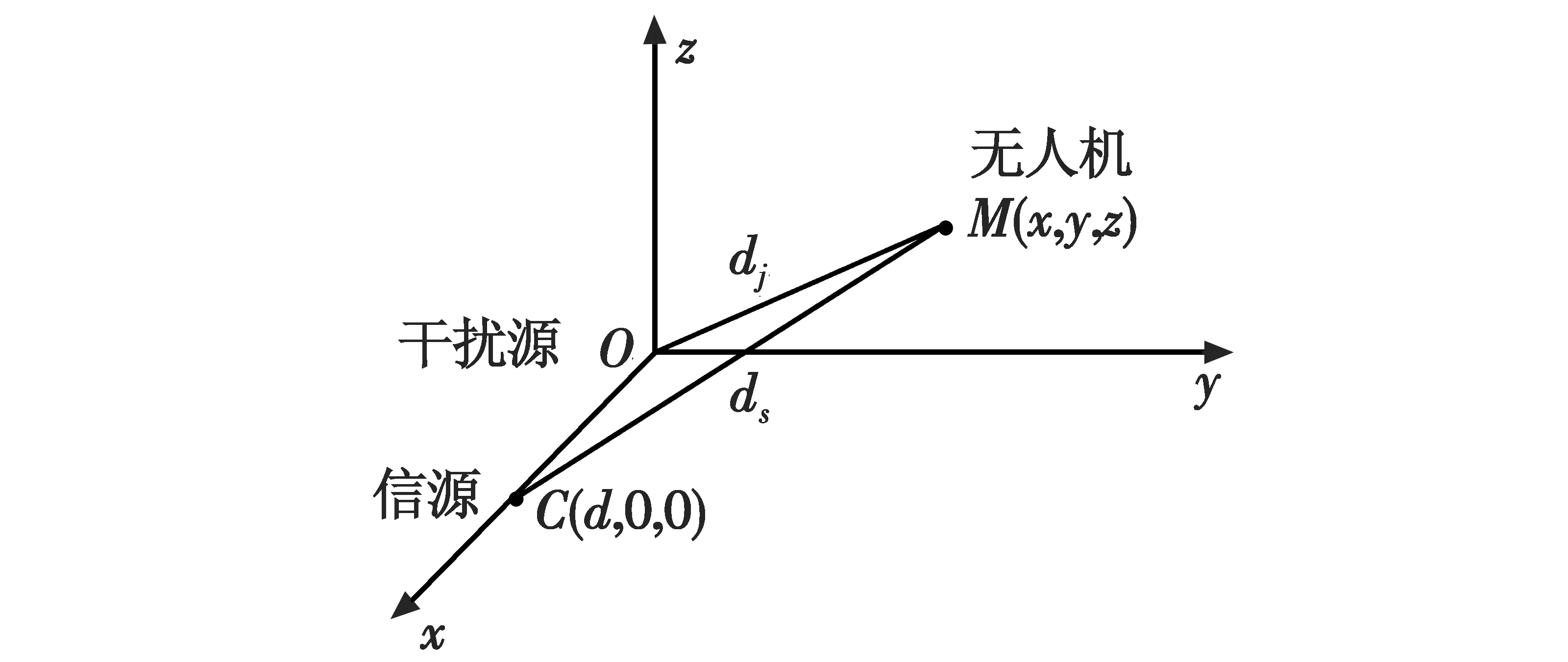
图3 坐标系示意图Fig.3 Schematic diagram of coordinate system
当已知无人机及信源位置时,实现引导式干扰在时域上需要满足条件[18]
(1)
式中:d是信源同干扰机间的距离;dj是干扰源同目标间的距离;c为光速;ds是信源同目标间的距离;TD表示引导式干扰信号产生的延迟时间;TH表示遥控信号的跳频周期;η表示干扰信号的延迟系数,其取值在0~1之间。由式(1)有

(2)
即

(3)
令D=ηTH-TD,并移项可得
(4)
下面分情况进行讨论。
1) 当D≤0,即ηTH≤TD时,由式(1)有
(5)
可知干扰条件恒不成立,即当ηTH≤TD时无法实现跟踪式干扰,即采取跟踪式干扰,干扰信号在时域上始终滞后于目标信号。
2) 当0 (6) 表示一个以干扰源和信源为焦点,焦距为2L,实轴长为D-d的双曲线绕x轴旋转一周后形成的旋转双叶双曲面内侧区域。 同时,由式(4)有 (7) 其等价于 (8) 由上式恒成立可得x≤D-D2/(2d),即有效干扰区域为平面x-D+D2/(2d)=0的左侧,又D/2 3) 当D=d,即d=c(ηTH-TD)时,由式(4)恒成立可推出 (9) 即有效干扰区域为平面x-(ηTH-TD)/2=0后侧。 4) 当0 同时式(4)等价于 (10) 由此可推知,当x≤(D-d)2/(2d)+d/2时,不等式恒成立,且有d/2<[(D-d)2/(2d)+d/2] 5) 当0<2d 图4 不同条件下干扰有效范围Fig.4 Effective jamming range at different Ds 根据无线电信号在自由空间中传播损耗公式[19],可计算出信号在空间中的传播损耗Lp,即 Lp=32.45+20lgf+20lgd-Gr (11) 式中:f为信号频率;d为信号传输距离;Gr为接收天线增益。 由式(11)可得,接收机接收到的干扰信号功率为 (12) 接收到的遥控信号功率为 (13) 接收到的干扰信号功率必须大于接收机灵敏度,因而有 (14) (15) 即干扰功率最大覆盖范围不超过半径为10(Pj+Gj-P0-32.45-20lg f ) /10的半球面。 同时,接收端干信比应不小于使其产生误码的最小干信比RJ,S 0,即 (16) 联立式(11)~式(16)可得 (17) (18) 令10(RJ,S 0+Ps-Pj-Gj t)/10=φ并化简,有 0<(1-φ)(x2+y2+z2)+d2-2dx。 (19) 现针对不同φ值下,对满足干扰功率条件的范围进行讨论。 1) 当φ=1即RJ,S 0=Pj-Ps时,式(19)化简为 0 2) 当φ≠1时,式(19)可化简为 (20) ① 当0<φ<1,即RJ,S 0-Pj-Gjt+Ps<0时,干扰功率覆盖此球面围成区域的外部如图5所示,且球面半径与φ单调性相同。 图5 0<φ<1时干扰功率覆盖范围Fig.5 Jamming power coverage when 0<φ<1 ② 当1<φ即0 综上所述,在对无人机实施跟踪式干扰时,当干扰方精确侦测出信源相对干扰源的位置C(d,0,0)、无人机相对干扰源的位置M(x,y,z)、遥控信号的跳频周期TH、引导式干扰信号产生的最小延迟时间TD时,能够确定满足时域条件的干扰范围,从而制定干扰开机策略如下: 1) 当ηTH≤TD时,干扰机引导信号生成时间大于跳频周期,无法实现跟踪式干扰,只能对无人机采取宽频压制式干扰; 2) 当0 3) 当d=c(ηTH-TD)时,无人机运动到平面x-(ηTH-TD)/2=0后侧时开启干扰源,能对其实施跟踪干扰; 4) 当d 5) 当0<2d 在进一步获知遥控信号发射功率Ps、干扰信号功率Pj+Gjt、接收机灵敏度P0及最低干信比RJ,S 0后,可进一步确定干扰有效范围,干扰开机策略在满足时域条件的基础上做以下调整: 1) 当RJ,S 0=Pj+Gjt-Ps时,无人机在前文确定范围中运动到平面x=2/d的右侧区域时开启干扰源,能够对其实施有效干扰; 为验证无人机跟踪式干扰有效范围与开机策略,依托实际环境参数对干扰范围进行仿真计算。假设干扰机与遥控发射机在同一个水平面上,对空中自由飞行无人机进行干扰对抗,信号在空间传播遵循自由空间损耗规律,遥控干扰频点为2.4 GHz,遥控信号等效辐射功率Ps为16 dBm,跳频周期TH为7.5 ms,接收机灵敏度P0为-105 dBm[20],干扰信号发送功率Pj为30 dBm,天线增益Gjt为0 dBm,干扰机延迟时间TD为1 μs,延迟系数η取0.001,探测到遥控信号距离干扰机距离d为5 km,仿真得出有效干扰范围随干信比变化关系如图6所示。 图6 干扰范围仿真Fig.6 Simulation results of jamming range 由仿真结果可知,干扰机能够在较小功率下形成较大功率覆盖区域,但当遥控信号源、干扰机的位置及时间参数确定后,能够唯一确定满足跟踪干扰的区域,而且在干扰功率有限时,有效干扰区域受干信比影响,范围随干信比增大而明显减小。当无人机飞临此有效干扰区域时开启干扰源,能够最大限度缩短干扰源开机时间,且无人机能够受到不小于最小干信比的干扰而取得较好干扰效果。 干扰机、信号源、接收机三者间的相对位置、性能参数、干信比等参数决定着跟踪式干扰的有效范围。在侦察获取相关参数的基础上,按本文所提方法确定有效干扰范围,进而根据无人机与此范围相对位置关系设计出的干扰开机策略,能够有效缩短干扰开机时间、减少功率浪费,对提高无人机干扰设备效能具有很好的指导意义。 但不同遥控链路的数据编码及基带调制方式、最低误码率、干扰成功概率等指标都会对干扰的最低干信比及干扰范围产生影响[21-23],如何针对特定无人机或特定遥控链路,设计最优干扰策略,有待进一步研究。 [1]FOLEY M.Sidebar:the not-so-big“guns”[J].Designfax,2016,12(1):1. [2]郑大壮.反无人机进行时——美国巴特勒“无人机防御者”步枪[J].轻兵器,2016(3):14-15. [3]雪莉,萌萌.无人机防务公司发布反无人机新概念[J].飞航导弹,2016(10):1. [4]紫玉,魏国福.雷锡恩公司研究高功率微波反无人机技术[J].飞航导弹,2016(8):1. [5]李苏阳,赵寰.FH/BFSK系统的常见干扰策略分析[J].现代电子技术,2012,35(13):13-15. [6]闫云斌,全厚德,崔佩璋.GMSK跳频通信跟踪干扰性能分析[J].电子技术应用,2012,38(5):109-112. [7]ZHANG Y,LIU F.Knowledge level based methods for jamming UAVs communication[J].Sensors & Transducers, 2014,174(7):144-149. [8]姚富强,张毅.干扰椭圆分析与应用[J].解放军理工大学学报:自然科学版,2005,6(1):7-10. [9]向仲,郝威,李雪.舰载跳频通信系统抗引导式跟踪干扰分析[J].火力与指挥控制,2012,37(11):202-205. [10]方超,郝威.双曲线法抗跟踪干扰研究[J].海军工程大学学报,2012,24(1):105-108. [11]方超,郝威,陈德志.跟踪干扰双曲线在跳频通信中的应用[J].电讯技术,2011,51(8):56-60. [12]MA X L,YAN Y B,WANG Y C.Performance analysis of anti-follower jamming in FH/MFSK communication system[J].Applied Mechanics & Materials,2014,668-669:1286-1289. [13]ZHANG Y,YANG L S.Triangle and GA methods for UAVs jamming[J].Mathematical Problems in Engineering,2014(2):1-8. [14]SHEN Y.Study on electromagnetic environment simulation of UAV remote control data link[J].Value Engineering,2012,31(5):178-179. [15]那丹彤,赵维康.跳频通信干扰与抗干扰技术[M].北京:国防工业出版社,2013. [16]ZHAO H,QUAN H D,CUI P Z.Follower-jamming resistible multi-sequence frequency hopping wireless communication[J].Systems Engineering and Electronics, 2015,37(3):671-678. [17]张冬晓,陈亚洲,肖雪荣,等.无人机主遥控数据链电磁干扰机理研究[J].微波学报,2016,32(2):90-96. [18]全厚德,闫云斌,崔佩璋.跟踪干扰对跳频通信性能影响[J].火力与指挥控制,2012,37(11):133-136. [19]PARET D.Wave propagation in free space[M]//RFID at Ultra and Super High Frequencies:Theory and Application.New Jersey:John Wiley & Sons,Inc.,2009:103-120. [20]Walkera.DEVO-10 reference manual[EB/OL].[2017-05-06].http://www.walkera.com.2012. [21]章小梅,孙倩,危水根.用不同调制方式实现跳/扩频混合通信的抗干扰性能[J].数字通信,2014,41(4):6-8. [22]WANG Z H,CHEN G,BLASCH E,et al.Jamming emitter localization with multiple UAVs equipped with smart antennas[J].Proceedings of SPIE-The International Society for Optical Engineering,2010,7696:769607-1-769607-9. [23]WU Z,MA X X,ZHANG L.Anti-jamming ability research on COFDM modulation of UAV image transmission[J].Advanced Materials Research,2014,1079-1080:614-617.

2.2 有限功率下干扰范围公式推导及讨论





3 基于有效干扰范围的开机策略制定

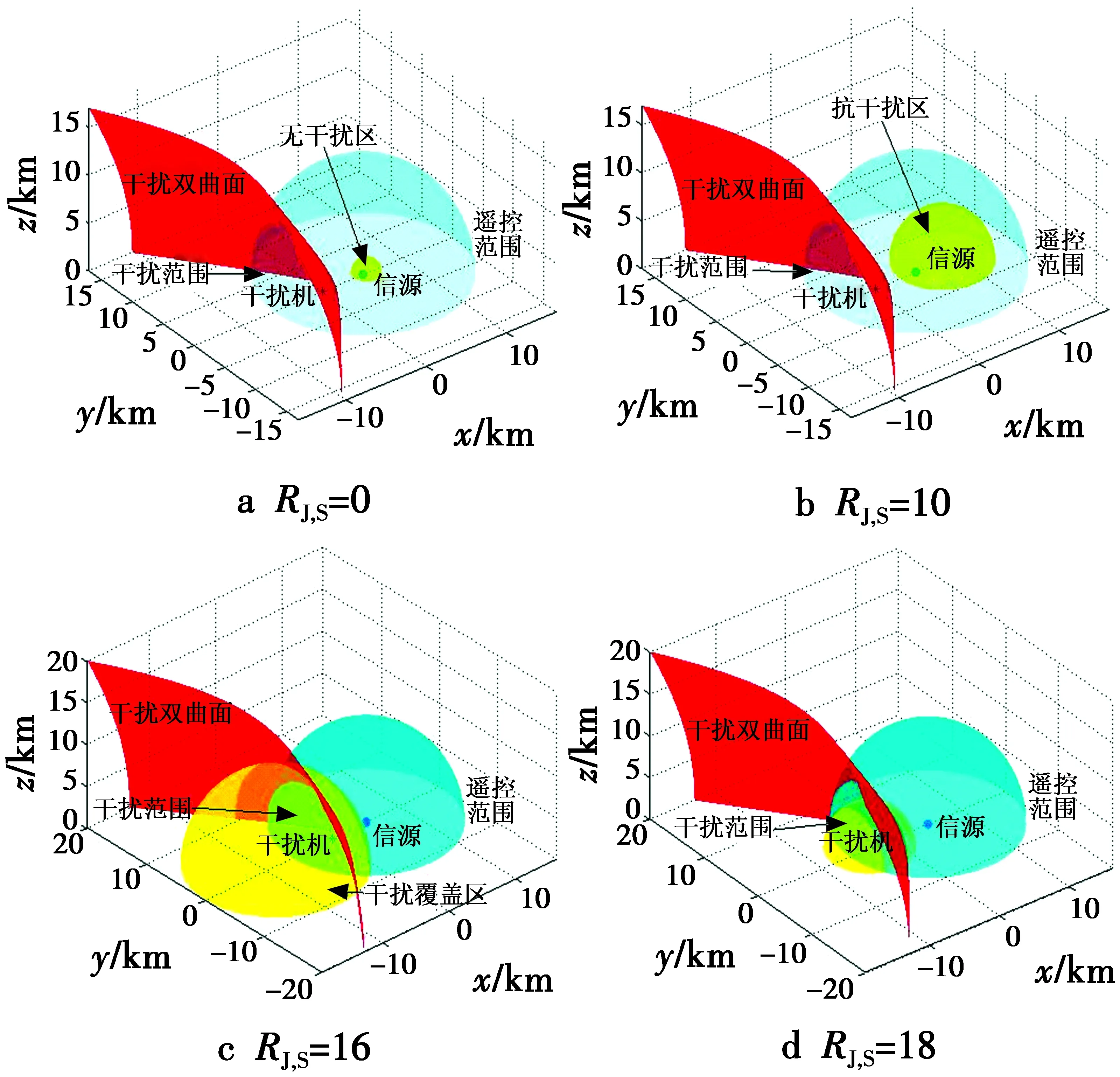
4 仿真实验
5 结论
猜你喜欢
制造技术与机床(2022年5期)2023-01-06 02:39:25机械设计与制造(2021年2期)2021-03-05 10:00:38航天电子对抗(2019年4期)2019-12-04 09:01:49制造技术与机床(2019年11期)2019-12-04 05:49:38江西建材(2018年2期)2018-04-14 08:00:31北京航空航天大学学报(2017年9期)2017-12-18 07:12:24电子制作(2017年10期)2017-04-18 07:22:42军事运筹与系统工程(2016年4期)2016-07-10 09:22:26现代兵器(2016年6期)2016-06-25 16:18:06电信科学(2016年9期)2016-06-15 20:27:25