损伤车体表面重建及喷枪位姿规划研究
2018-04-18 12:02李荣华王振宇温帅方李金明
大连交通大学学报 2018年2期
李荣华,王振宇,温帅方,李金明
(大连交通大学 机械工程学院,辽宁 大连 116028)
0 引言
随着世界经济的不断发展,汽车的使用越来越普及,交通事故的发生频率越来越高.交通事故中,车体表面的损伤是最普遍的问题,它不仅影响汽车的美观,更影响汽车的安全.汽车喷涂是解决这一问题的常见办法,通常情况下,各汽车维修公司都通过人工操作来进行汽车表面喷涂,但喷涂作业时,会对人体造成危害[1],且人工喷涂难以保证效果优良.另外,现代社会的人力成本越来越高,汽车喷涂行业的成本也随之提高.因此,急需一种可以针对不同车型、不同部位进行自动识别车体喷漆系统替代喷涂工人进行作业.这一系统不仅可以减少喷涂工人的人身危害,也能在提升喷涂效果的前提下,有效降低喷涂成本.
在自动化喷涂作业中,机械手的导引是其中的难点和关键点,喷涂过程中不仅要求机械手引导喷枪均匀的移动,更要满足喷枪喷射方向始终垂直于被喷车体表面.视觉导引[2]是解决这一问题的有效方式,本文通过线扫描传感器获取目标车体的三维点云信息[3]对目标车体进行三维重建[4],并对点云进行处理找到各点对应法向量,以此引导机械手来规划喷枪的合理位姿[5].本测量系统对汽车的型号和损伤部位均无要求,有较好的应用价值.
汽车喷涂是由来已久的问题,针对此问题很多学者进行了大量研究.吴月琴[6]提出了一种汽车轮毂的自动喷漆系统,其采用了链传动、滚珠滑轨和多个喷枪进行实现.许伟伟[7]阐述了一种“无尘干磨”的新式喷涂方式,但其操作仍需人工手动进行.付文龙[8]用静电喷枪在某汽车生产线上进行了实现,这一方法能够减少油漆损耗,提高效率,但仍需手工操作.综上所述,针对不用车型、不同部位进行自动化喷漆仍然是待解决的难题,本文针对这一问题,提出了基于线扫描传感器的损伤车体表面重建系统及喷枪位姿规划方法,通过视觉导引的方法为喷涂机械手提供位姿规划.
1 损伤车体表面重建系统
损伤车体的表面点云信息重建是实现喷枪位姿规划的基础和前提.本文基于大恒公司的Gocator2350A- 3B- 00型体式扫描型传感器,建立损伤车体表面重建系统.
1.1 系统组成
系统由以下模块组成:
(1)TH20单轴滑台一台,用于承载扫描传感器在其上移动,实现目标车体点云扫描;
(2)750 W伺服电机一台,配套15 A驱动器一台,用于驱动滑轨上的传感器运动;
(3)大恒Gocator2350A- 3B- 00型传感器一台,为系统的核心部件,通过其结构光线扫描的方式对车体表面进行三维点云恢复;
(4)光电编码器一台,用于对滑轨上传感器在世界坐标系下的实时位置进行控制,从而实现坐标系之间的转换;
(5)计算机一台,用于对整套系统进行软件控制.
1.2 车体表面点云信息重建
该系统基于Gocator扫描型传感器通过结构光线扫描的方式获取目标车体点云,首先建立坐标系如图1所示.
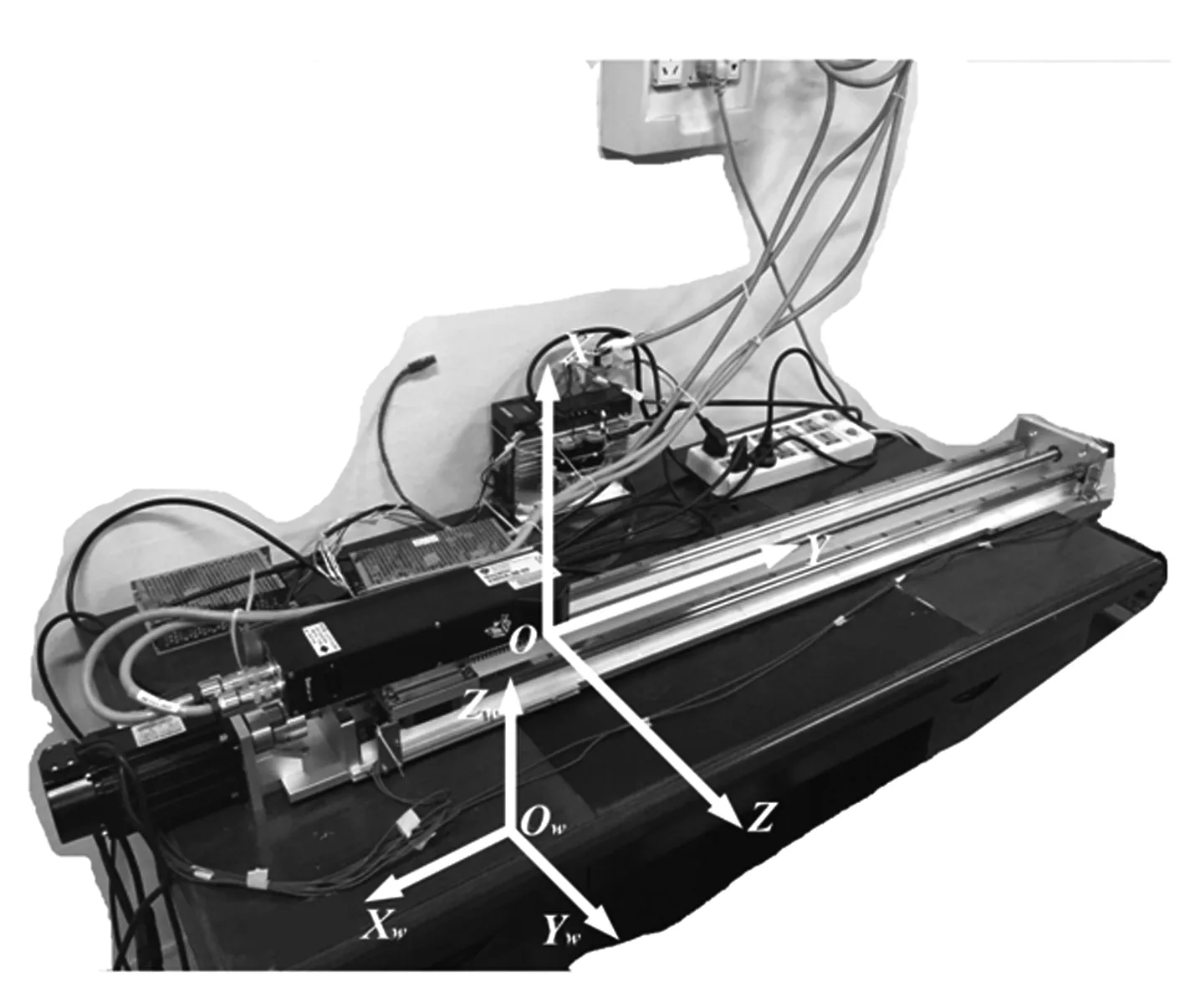
图1 坐标系的建立
其中,O-XYZ为传感器坐标系,Ow-XwYwZw为世界坐标系,测量时,通过光电编码器能够确定传感器在世界坐标系下的位置,传感器会测出目标车体的表面点云数据.将点云数据换算到世界坐标系下的点云后,即可恢复车体表面三维点云信息.图2为被测目标车体,图3为该车体恢复的三维点云信息.
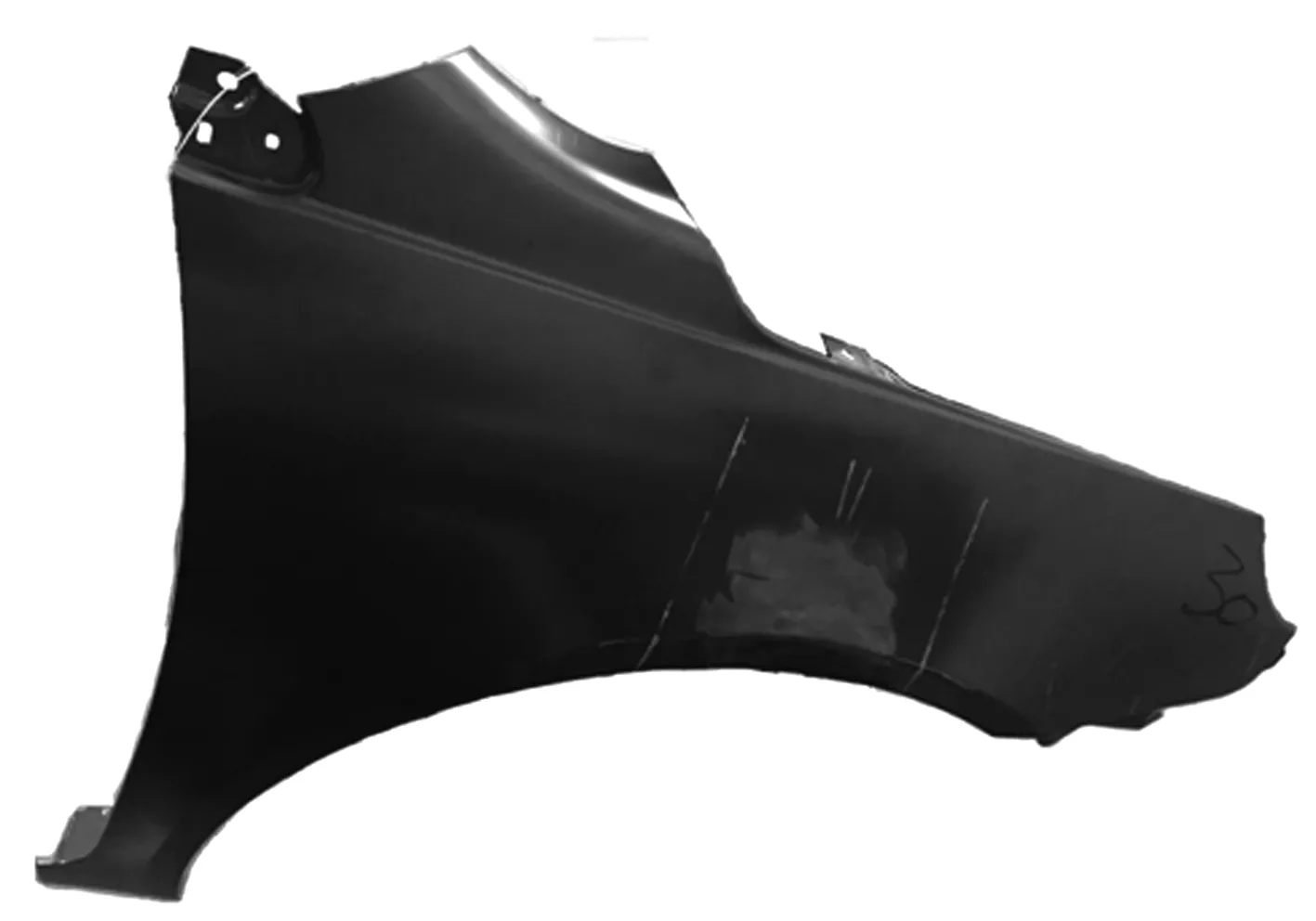
图2 被测车体
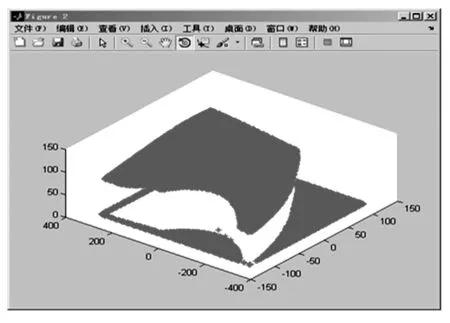
图3 被测车体点云数据
2 车体修复喷枪位姿规划方法
2.1 喷枪位姿规划理论
喷枪在运动时,其轨迹沿着直线行走即可,但其满足喷枪与车体表面被喷点实时垂直的要求是自动化喷漆的核心问题,因此,这一问题的根源是从三维点云中找到被喷点的法向量[9].
依靠深度相机、光编码技术及结构光原理测量出目标(车体表面)到传感器或喷枪头的深度距离,结合光线发射角度解算出车体表面有限个均匀的点集的三维坐标,即利用密集的三维点云集合来近似车体表面形貌,那么可以认为传感器所发射的红外线面阵越密集,模拟的表面形貌效果越好[10].初步假设深度相机分辨率为(640×480)满足技术要求.
通过线扫描激光传感器得到车体点云数据,即每个点的坐标(X,Y,Z),运用数值分析的方法对曲面进行拟合,可设曲面方程为:
Z=a+b·X+c·Y+d·X·Y+e·X2+f·Y2
(1)
即曲面方程可写为两向量相乘的形式:
(2)
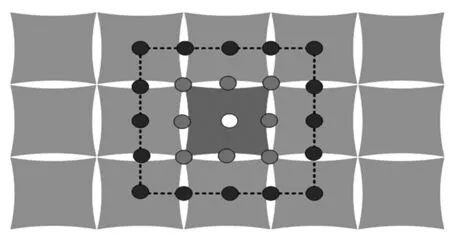
图4 曲面25点示意图
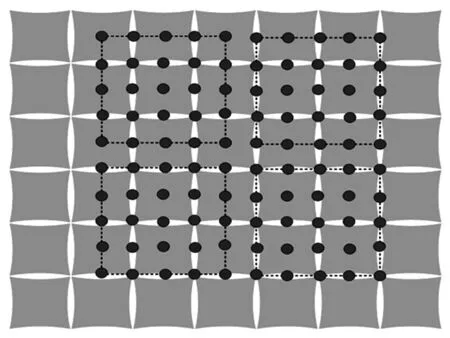
图5 曲面相邻4区域示意图
由于点云数据量过大,在程序中对点云数据进行了间段取样,同时每相邻25个点为一个取样面,从而将整个点云数据分为许多个小面,对每个曲面进行拟合,如图4所示,相邻四个曲面示意图如图5所示.
但在曲面拟合过程中,相邻两个曲面之间关系断裂,两个曲面拟合后在相邻两点处发生翘边现象.由于以上原因,采用重叠间段采样手段,增加相邻两曲面之间的关系,解决相邻两点处的翘边现象.重叠取样方法如图6所示,先取出25个点作为第一个曲面进行拟合求出曲面方程,在取第二个曲面时,从第一个曲面的第三列点作为第二个曲面的第一列点,使得内部的一个3×3的曲面间隔取样.运用此种方法实现了曲面间的联接,解决的曲面生成时的平整度误差.
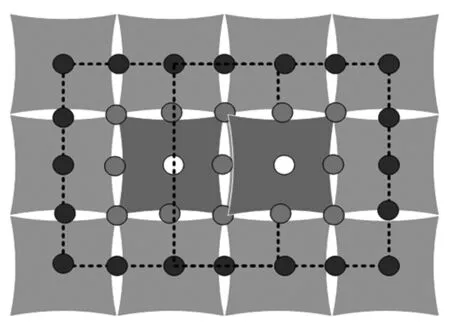
图6 重叠取样方法
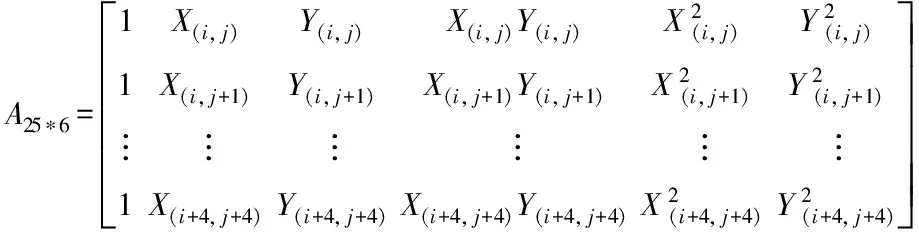
取每25个点作为一个曲面,可设
B25*1=A25*6·S6*1
(3)
其中
(4)
(5)

(6)
(7)
根据上述求得的6大参数信息:

(8)
2.2 喷枪位姿规划效果
由于车体表面在测量过程中,会因为外界光线干扰以及采集过程中产生的噪声等,产生噪点.需要将目标车体点云进行初步点云数据处理,去除非车体上的噪点以及离群点,方便后续点云数据处理.去除噪点后车体点云数据如图7所示.
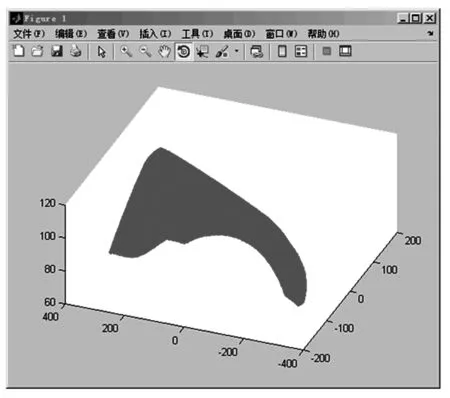
图7 去除噪点后的车体
传感器扫描得到的点云为致密点云,处理耗时较长,效率低下.同时,由于受到喷枪最小喷涂直径以及其他因素影响,整个喷涂过程所能保证的喷涂精度有限,故无需全部精确取点.因此可将点云数据进行稀疏处理,降样本后,取出取样面的中心点,从而提高点云处理效率,同时能保证最大喷涂精度.点云数据稀疏后如图8所示.
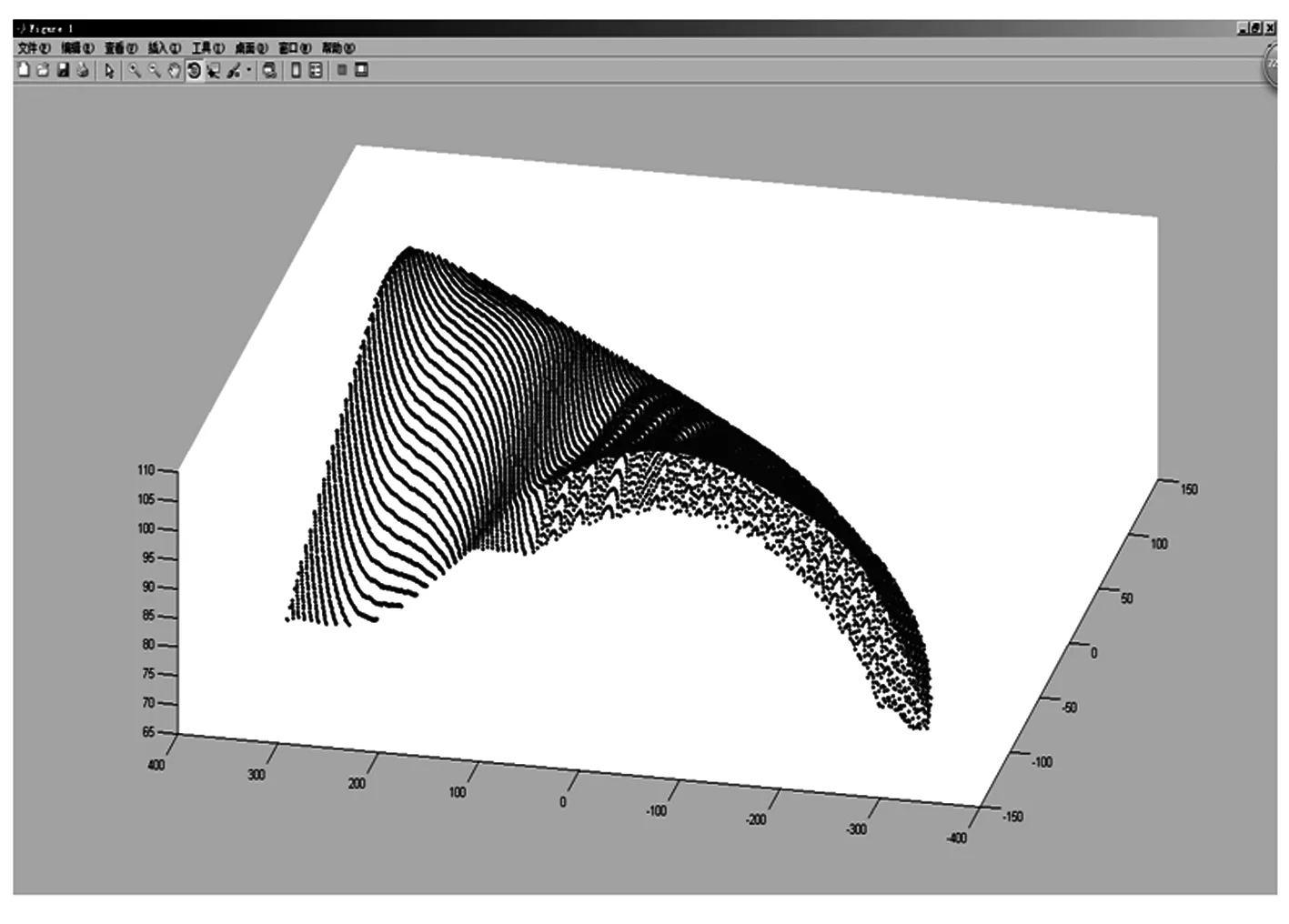
图8 稀疏点云数据
运用前一节详细介绍的重叠取样算法,通过逐次重叠取样25点构造曲面,依次将车体表面点云数据进行分片处理,从而通过构造出各曲面方程,得到各曲面法向量,法向量如图9所示.
图9 体点云法向量表示
依据此法向量,可保证喷枪垂直于车身表面,机械手可以驱动喷头调整其与车体表面之间的角度,从而形成整个喷涂过程.
3 结论
(1)基于线扫描传感器建立了损伤车体表面重建系统,对车体被测部位的三维点云进行了恢复,为寻找车体表面法向量提供了先验模型;
(2)基于车体被测表面点云模型,提出车体表面法向量求取方法,通过法向量对喷枪进行了位姿规划,喷头与被测部位保持标准垂直状态.
参考文献:
[1]彭小龙. 汽车喷涂作业中常见的漆面缺陷及预防措施[J]. 汽车维护与修理,2015(9):80- 82.
[2]侯震, 许艳玲, 黄色吉,等. 视觉传感技术在机器人焊接中的应用[J]. 上海交通大学学报,2016(S1):55- 58.
[3]周富强, 李章, 张广军. 基于三维测量扫描线点云的表面重建[J]. 仪器仪表学报,2006, 27(6):619- 623.
[4]陈辉, 马世伟, ANDREAS NUECHTER. 基于激光扫描和SFM的非同步点云三维重构方法[J]. 仪器仪表学报, 2016, 17(5):1148- 1157.
[5]郭闯强, 倪风雷, 刘宏. 多目标位姿约束下空间机器人载体姿态扰动优化[J]. 空间科学学报,2015, 35(2):230- 236.
[6]吴月琴, 汪惠芬. 汽车轮毅自动喷涂系统的设计[J]. 机械制造与自动化,2015(5):23- 25.
[7]许伟伟. 汽车修补喷涂新工艺——无尘干磨[J]. 汽车维护与修理,2015(9):44- 46.
[8]付文龙. 手动静电喷枪在某汽车喷涂线上的应用[J]. 现代涂料与涂装, 2015, 18(9):59- 61.
[9]刘艳菊, 张永德, 杨波. 三维点云法向量的模糊估值算法[J]. 华南理工大学学报(自然科学版),2013, 41(5):68- 72.
[10]李国俊, 朱光耀, 李宗春, 等. 利用Voronoi协方差矩阵重建隐式曲面[J]. 中国图像图形学报,2016, 21(3):323- 330.
猜你喜欢
能源工程(2021年1期)2021-04-13
酒·饮料技术装备(2018年1期)2018-04-28
中国有色冶金(2018年1期)2018-02-01
电力系统及其自动化学报(2016年5期)2016-12-01
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
汽车维护与修理(2015年1期)2015-02-28