重型车辆运动状态估计仿真研究
2018-04-12 04:23王建锋郭维
计算技术与自动化 2018年1期
王建锋 郭维

摘 要:重型车辆主动安全研究的核心是如何快速获取车辆运行状态、环境等参数,并将这些参数进行综合分析,按照一定的规律对车辆进行控制。车辆运动状态参数有的可以直接通过车载传感器测量得到,有的则不能。通过建立重型车辆的七自由度动力学模型,利用无迹卡尔曼滤波状态估计方法求解重型汽车在双移线试验下的运动状态参数,将获得的结果与同参数下的Trucksim计算结果进行对比,仿真结果表明,该方法能够实现重型车辆运动状态的估计,并且具备较高的估计精度。
关键词:重型汽车;运动状态;无迹卡尔曼滤波;汽车主动安全
中图分类号:U461
文献标志码:A
1 引言
近年来,人们对车辆主动安全性的要求不断提高,车辆主动安全成为车辆技术研究的热点。车辆主动安全系统的核心是如何对车辆运动状态、环境等参数进行综合分析并按照一定的规律对车辆进行控制。车辆运动状态参数有的可以直接通过车载传感器测量得到,有的则不能,因此,通过数据融合的方法来获取车辆的运动状态信息已成为目前车辆状态参数估计研究的重要手段。国内外学者通过各种方法对车辆的运动状态参数,尤其是车辆质心侧偏角进行了研究,取得了一定的研究成果[1-4]。但是针对重型车辆运动状态估计的研究则较少,因此本文以重型车辆为研究对象,建立七自由度车辆动力学模型,利用无迹卡尔曼滤波的状态估计方法,对重型车辆的运动状态进行仿真研究。
2 重型车辆动力学模型
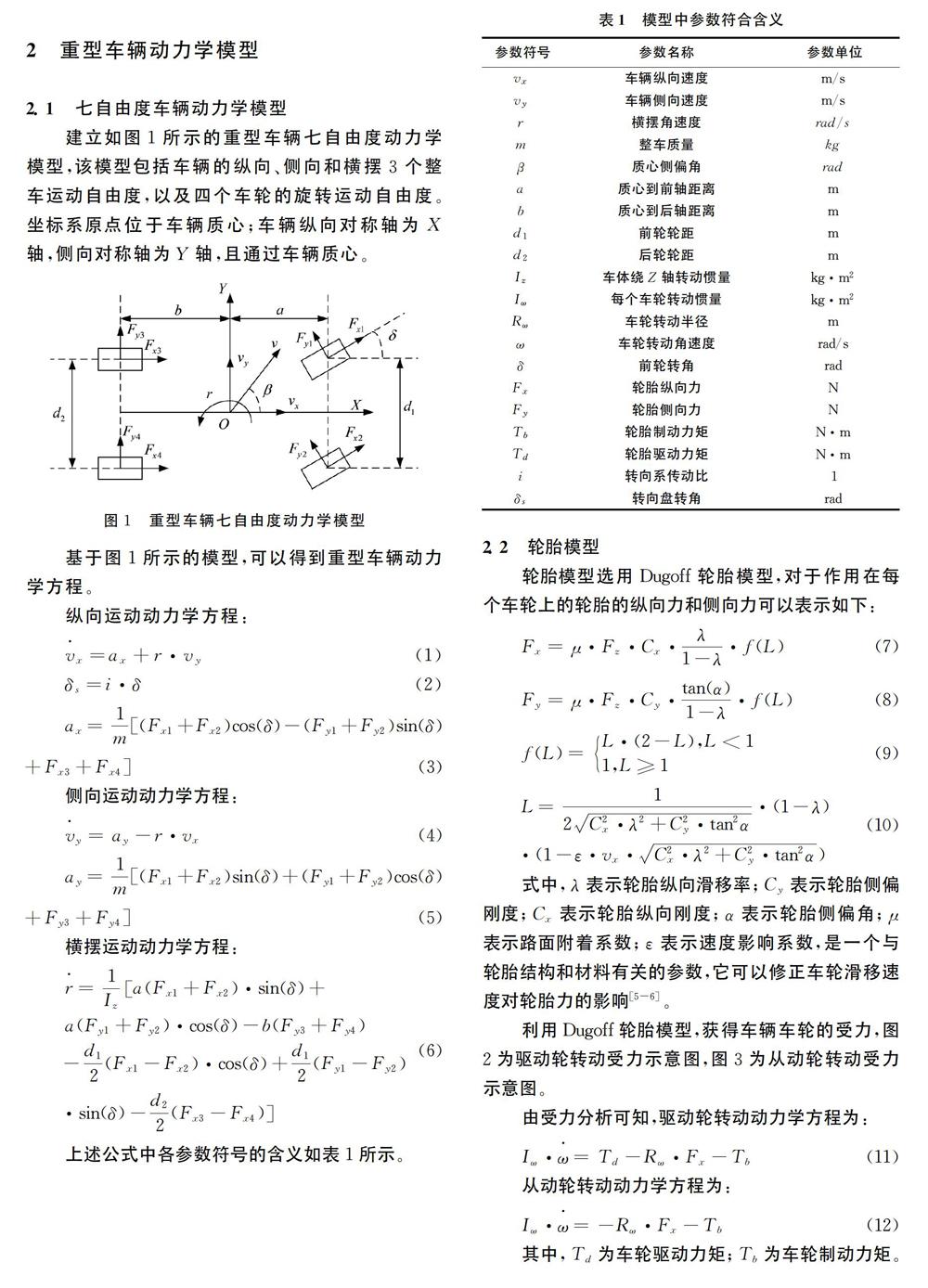
2.1 七自由度车辆动力学模型
建立如图1所示的重型车辆七自由度动力学模型,该模型包括车辆的纵向、侧向和横摆3个整车运动自由度,以及四个车轮的旋转运动自由度。坐标系原点位于车辆质心;车辆纵向对称轴为X轴,侧向对称轴为y轴,且通过车辆质心。
其中,随机变量w(t)表示系统过程噪声,v(t)表示测量噪声。
3.2 无迹卡尔曼滤波算法
无迹卡尔曼滤波利用相似分布原理,构造出与原分布均值和协方差相同的Sigma点集,并将其引入非线性系统进行无迹变换,通过求变换点的统计量得到估计量。对于式(20)和式(22)所构建的非线性估计系统,其无迹卡尔曼滤波算法如下:
4 仿真研究
利用所建立的基于无迹卡尔曼滤波的重型车辆运动状态估计模型,进行双移线试验仿真研究。利用matlab编写模型求解程序,获得车辆状态参数估计结果,将其结果与相同汽车参数下的TruckSim仿真结果进行对比,以验证本文所采用方法的有效性。为了对比本文算法与TruckSim的结果,采用平均峰值误差、平均最大相对误差及平方和误差指标进行比对。本文仿真研究中重型車辆的仿真参数如表2所示。
双移线试验中,路面附着系数设为0.85,仿真车速为60km/h,按照IS03888 -1- 1999标准进行试验。
图4为双移线试验中,重型车辆的输入参数,(a)为试验中汽车的运动位移,(b)为试验中转向盘转角。
本文利用无迹卡尔曼滤波估计得到的重型车辆运动参数与Trucksim计算结果的对比如图5-图8所示,其中实线为trucksim计算结果,虚线为本文方法的估计结果。
表3为按照本文采用的三种指标,对比两种计算结果的具体值。
从对比结果可以看出本文采用的基于无迹卡尔曼滤波的重型汽车运动状态估计方法,对纵向速度、横向速度和和质心侧偏角的估计值与Trucksim的结果相比误差较小,横摆角速率的误差稍大,其主要误差来源于估计值的波峰和波谷处。
5 结论
通过建立七自由度重型车辆动力学模型,利用无迹卡尔曼滤波状态估计方法求解重型车辆在双移线试验下的运动状态参数,将获得的结果与同参数下的Trucksim结果进行对比。分析结果表明,本文的基于无迹卡尔曼滤波的重型汽车运动状态估计方法能够较精确的估计出重型车辆的运动状态参数。
参考文献
[1]沈法鹏,赵又群,林菜,基于卡尔曼滤波的车辆侧偏角软测量[J].农业工程学报,2013,29(10):71-75.
[2]柳惠,基于模型的车辆质心侧偏角估计方法研究[J].重庆理工大学学报:自然科学版,2016,30(11):25-28.
[3]王建锋,李平,基于多信息融合的车辆状态参数估计[J],计算机仿真,2013,30(11):131-136.
[4]陈乐珠,韩峻峰,潘盛辉,等,汽车侧偏角与横摆角的仿真与估计[J].汽车科技,2011(1):31-33.
[5] BOUTⅪD.Extended nonlinear observer normal forms for a classof nonlinear dynamical systems[J].Int J Robust Nonlinear Control,2015,25(3):461-474.
[6]黄康,段松林,甑圣超,等,基于系统约束的重型汽车动力学建模及分析[J].中国机械工程,2017,28(4):478-485.
[7] WENZEL T A,BURNHAM K J,BLUNDELL M V,et al.Kalmanfilter as a virtual sensor: Applied to automotive stability systems[J].Transactions of the Institute of Measurement and Control,2007,29(2):95-115.
[8]WENZEL T A,BURNHAM K J,BLUNDELL M V.Dual extendedkalman filter for vehicle state and parameter[J].Vehicle System Dy-namics,2006,44(2): 153-171.