
挤奶机器人的结构设计
2018-04-12 00:52杨存志吴泽全
农机化研究 2018年4期
杨存志,吴泽全,郭 洋
(黑龙江省农业机械工程科学研究院,哈尔滨 150081)
0 引言
随着我国奶牛养殖向标准化、规模化、集约化、现代化发展,挤奶机械化程度高低已成为衡量规模奶牛场发展水平的重要考量指标。世界各国注重于奶牛健康、食品安全、动物福利和舒适度,为将挤奶作业创造出一个优良工作环境,普遍将高、精、尖自动化技术应用到奶牛挤奶领域。目前,欧、美等发达国家纷纷将高智能化挤奶自动化装备引入奶牛挤奶系统中,并取得了较好的经济效益和生态效益。目前,全世界范围内全自动智能挤奶机器人研制生产技术主要被欧、美等发达国家所掌握。国内自主研发的同类产品基本还是空白,本项目在充分参考和消化国外最先进技术的基础上,研究并开发出一套具有自主知识产权的全自动智能挤奶机器人。
挤奶机器人可实现最接近于奶牛自然状态下的无人化挤奶作业。在养殖福利方面,将使奶牛更加舒适,有效控制牛奶品质和保证奶牛健康;在工作效率方面,增加每日挤奶次数,大多数奶牛可挤奶3次,从而提高产奶量,且利于实现奶牛场的高度自动化;在节本增效方面,每套设备平均每天能挤50~60头奶牛,节省大量劳动时间和生产成本。
1 挤奶机器人整体结构的设计
机械结构总体方案中所设计的机械臂集成了大部分挤奶组件,将会产生很大的重力和倾覆力矩,因此机械臂在横梁上的安装方式与整机的材质显得尤为重要。挤奶机器人整体结构设计的三维模型如图1所示。

1.控制系统 2.挤奶和清洗系统3.三自由度运动机构 4.机械臂及末端执行器 5.挤奶箱
1.1挤奶机器人工作过程
由图1可知:工作时,奶牛从右向左进入挤奶箱,在挤奶箱上方有检测奶牛臀部位置的摄像机,初步确定奶牛乳房位置,控制系统发出指令,三自由度机械臂按照控制程序以安全轨迹运动到奶牛乳房附近;末端执行器中的图像识别测距传感器精确测定4个乳头三维坐标,其后由清洗刷和挤奶杯组分别进行清洗、按摩、套杯、挤奶、脱杯、药浴等一系列程序,挤奶结束机械臂返回清洗座。
1.2挤奶机器人控制原理
挤奶机器人是集成了机械、气液、自动控制、传感器、计算机视觉、软件及数据库等的一体化系统,采用模块化设计,以主控计算机为核心,分为管理、识别、控制、数据采集等功能模块。各模块间接口采用网络、CAN总线、RS232、USB、RFID和Zigbee等多种连接方式。整体原理框图如图2所示。

图2 整体控制原理图
1.3挤奶机器人总体尺寸参数
奶牛的体貌特性、生物学特征、管理和饲养方法等因素是挤奶机器人结构设计的依据和前提,决定着挤奶机器人的结构形式和工作方式。荷斯坦奶牛是我国主要的奶牛品种,分布在黑龙江、新疆、内蒙古及甘肃等地域辽阔的北方草原地区,其体貌特征如表1所示。

表1 中国荷斯坦奶牛体貌特征
通过中国荷斯坦奶牛的体长、体高、体宽、乳房的位置和乳头的分布等体貌特征,确定以下参数:
挤奶箱长×宽×高为2.9m×0.93m×1.9m;机械臂横向移动行程为0~1.35m;机械臂纵向移动行程为0~0.4m;机械臂垂直旋转角度为0°~60°;挤奶杯组至旋转轴距离约1.15m。
2 三自由度运动机构的设计
挤奶机械臂由三自由度运动机构作为驱动系统,包括X轴直线运动机构、Z轴直线运动机构、绕Z轴旋转运动机构等3个部分组成,实现横向、纵向、旋转3个方向的同步或异步运动,从而完成以奶牛乳房乳头为目标的空间连续运动,如图3所示。挤奶机械臂以最小的机械结构和活动范围实现了挤奶运动轨迹。

1.X轴直线运动机构 2.Z轴直线运动机构 3.绕Z轴旋转运动机构
2.1X轴直线运动机构
X轴直线运动机构由伺服电机、机架、同步齿形带、导轨及横移结构组成。其工作原理如下:由横移伺服电机驱动齿形带水平运动,推动横移机构,带动Z轴直线运动机构的纵移机构来实现机械臂的的水平动作。该机构运动的距离受控制系统的限制,在位置传感器或闭环信号等检测下可以自动调节,行走合适的距离。
由1.3节可知:机械臂横向移动行程为0~1.35m。由于皮带太长,运动机构中皮带张紧结构的设计成为了关键,直接影响到直线运动的精度。
同步带张紧结构设计如图4所示。将圆弧齿形压块压在同步带的一端,以顶丝固定,在同步带的另一端同样安装;拧紧张紧螺钉,使张紧块受力向张紧座移动,另一端也同样操作,可以使皮带越拉越紧,最终达到有效张紧的效果。
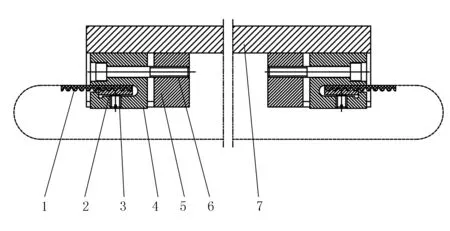
1.圆弧齿同步带 2.齿形压块 3.顶丝4.张紧块 5.张紧座 6.张紧螺钉 7.固定板
2.2Z轴直线运动机构
Z轴直线运动机构实现机械臂的纵向运动。该机构固定于X轴直线运动机构的横移架构上,由伺服电机、机架、同步齿形带、导轨及纵移结构组成,如图5所示。

图5 Z轴直线运动机构
为保证受力稳定,采用两根同步齿形带。其工作原理如下:由纵移伺服电机驱动齿形带垂直运动,推动纵移机构,带动绕Z轴旋转运动机构的旋转机构来实现机械臂的的垂直动作。该机构运动的距离受控制系统的限制,在位置传感器或闭环信号等检测下可以自动调节,行走合适的距离。
2.3绕Z轴旋转运动机构
绕Z轴旋转运动机构实现机械臂的旋转运动,如图6所示。该机构固定于Z轴直线运动机构的纵移机架上,由伺服电机、轴承及旋转结构组成。挤奶机械臂固定安装在旋转机构底端,工作原理为伺服电机驱动旋转轴,使旋转机构带动挤奶机械臂在水平面上形成扇形运动。

图6 绕Z轴旋转运动机构
以上3个横向、纵向、旋转运动机构的结合,实现了以奶牛乳房乳头为目标的空间连续运动路径。伺服电机的优点是精确度高、调速方便、闭环反馈信号及时准确、结构小巧紧凑、低噪音,且过载时能及时断电,在外力作用下反方向运动,避免对奶牛进行伤害。
3 挤奶机械臂的设计
挤奶机械臂作为机器人的末端执行器,要完成最终的挤奶工作,如图7所示。因此,它集成了图像识别测距系统、挤奶杯组、挤奶清洗管路、脱杯装置、乳头清洗刷等部件。
在进行奶牛挤奶套杯前,对奶牛乳房的按摩和清洗是挤奶过程必不可少的重要环节。当末端执行器运动到奶牛乳房的前端时,安装在机械臂下的气缸推动清洗刷由图7状态1旋转到状态2的位置,此时图像识别测距系统准确定位奶牛乳头,清洗刷在三自由度运动机构的驱动下对奶牛的4个乳头分别进行按摩清洗;清洗过程结束后,清洗刷又回到状态1位置。

1.旋转轴 2.清洗刷 3.档污板4.机械臂构件 5.图像识别测距系统 6.挤奶杯组图7 挤奶机械臂
3.1乳头清洗刷结构设计
图8为清洗刷结构图。由电机齿轮啮合主动小齿轮,主动大齿轮啮合从动大齿轮,使两个毛刷实现转速相等、方向相反的运动,传动箱传动比为1:1,两个毛刷的重合部分约4mm。由于清洗刷在有水环境下工作,直流减速电机需要设计防水套9来进行保护。清洗刷主要零件采用尼龙材质,优点是防锈、质轻、成本低,如果发生故障可以整体更换。
直流减速电机参数如下:功率P=25W,额定转速n=120r/min,额定转矩T=3N·m,电压24V。
3.2挤奶杯结构设计
挤奶机器人可以对奶牛4个乳房的产奶量、奶品质、病变等进行分别监测,每个挤奶杯都是独立单元,因此挤奶杯的结构与通常的奶杯有所不同。挤奶杯结构如图9所示。图9中,固定座与固定套的接触面为球形,固定座上系绳索与脱杯气缸连接,挤奶时脱杯气缸放松,整个挤奶杯吸附在奶牛乳房上与固定套脱离;脱杯时,挤奶杯在气缸拉力下竖直立于固定套上。真空与大气交替变化的气管道,气压作用在奶衬上,产生一吸一松的挤奶动作。真空奶管道吸出的牛奶与真空混合输送到下一单元。此挤奶杯整体结构紧凑,布局合理,功能完善,可以小批量生产,适合挤奶机器人使用。

1.毛刷 2.传动箱体 3.主动大齿轮 4.主动小齿轮 5.传动箱盖 6.从动大齿轮 7.电机齿轮 8.电机 9.防水套

1.奶衬 2.挤奶杯体 3.杯托1 4.杯托2 5.固定座 6.固定套 7.真空奶管道 8.气管道
4 挤奶箱的设计
挤奶箱是对奶牛进行挤奶、补饲精饲料的场所,由正进门栏、侧进门栏、正出门栏、侧出门栏和饲槽组成。进出门栏分别安装在左右框架上,通过安装在框架上方气压缸的伸缩进行开合。挤奶箱结构如图10所示。

1.正进门栏 2.侧进门栏 3.挤奶箱框架 4.侧出门栏 5.正出门栏 6.饲槽 7.气缸
为了方便奶牛的进出自由,营造友好自然的挤奶空间,综合国外先进挤奶自动化装备工作模式与设计理念,挤奶箱采用“步入步出式”设计,便于奶牛的自然、无障碍快速进出,摈弃人为驱赶对奶牛所造成的不良影响。
根据高产荷斯坦奶牛体型,挤奶箱内部空间足够宽敞,给予奶牛完全自由的空间。同时,在前端设计了收放式饲槽(见图11),安装在正出门栏上。当奶牛进入后可以饲喂时,饲槽内气缸动作,由状态1变成状态2,系统识别奶牛编号(ID),读取上位机饲喂量数据和曲线,驱动内部管道中的电机转动,流出一定量的精饲料到饲槽,使奶牛安静的进食与挤奶;挤奶结束后,饲槽由状态2变成状态1,缓慢收入挤奶箱内部,出门栏打开,奶牛将被动或主动离开挤奶箱。一头奶牛尽快地离开就能让下一头奶牛更快地进入,以实现每次挤奶节省10s或更多时间(奶牛从进入、挤奶到离开,一般花费7~10min),一天就能节省45min或者说可以多挤3头奶牛,从而最大程度地提高生产效率。
在挤奶过程中的精饲料补饲主要有两个优点:
1)通过培训奶牛后,有利于促进奶牛进入挤奶箱,并利于奶牛在挤奶箱中的安静挤奶;
2)在奶牛各泌乳阶段,泌乳高峰发生的时期一般在产犊后4~6周,而食欲完全恢复则在产犊后8~10周,表明食欲的恢复要远滞后于泌乳高峰,进而影响产奶性能。奶牛产犊后,可通过精饲料饲槽加喂适当的精饲料,从而为泌乳初期提供充足、丰富的能量来源,有利于促使产后奶牛泌乳高峰的尽早出现,保持全泌乳期有较高的产奶量。

图11 精饲料饲槽
5 样机控制及试验
挤奶机器人的执行机构由上位机发命令给PLC,再由PLC驱动伺服电机带动机械臂运动,伺服电机选用FESTO的CMMP-AS系列电机,定位精度可达0.1mm。在调试过程中需要对电机参数进行设定,可定义参数包括定位精度、寻零方式、运行速度、行程范围、数据采集通道和通信方式等。试验中,当上位机通过图像采集系统采集到奶牛乳头定位位置后,将位置信息发送给PLC,PLC通过CAN总线通讯将命令发送给伺服电机并驱动机械臂和末端执行器运动到奶牛乳头位置,进行套杯等挤奶程序,如图12所示。试验样机通过实际测量,定位误差在1mm以内。

图12 试验样机套杯挤奶图
6 结论
本课题研究的挤奶机器人在参考国外各类先进设备的基础上,针对我国主产区奶牛特征,对挤奶机器人的驱动系统、三自由度运动机构、挤奶机械臂、挤奶箱、清洁机构及挤奶杯等机构进行了优化设计,并完成了第2轮样机的制造。试验验证表明:各部件及整机的功能完全达到课题设计要求。
参考文献:
[1]宋秋梅,冯欣,陶继哲,等.挤奶机的组成及关键部件的性能分析与评价[J].农机化研究,2005(3):112-113.
[2]陈伟旭,金鹍鹏,马君,等.挤奶机真空系统测试装置的研究与设计[J].农机化研究,2012,34(1):123-125,130.
[3]刘俊杰,杨圣虎,蔡晓华,等.基于D-H法的挤奶机器人机械臂运动学分析[J].农业科技与装备,2015(10):25-28.
[4]刘俊杰,杨圣虎,程睿,等.基于有限元法的挤奶机械臂ANSYS仿真[J].农业科技与装备,2015(6):25-28.
[5]张博,陈雷.基于AT89C51的自动挤奶计量机检测装置的研制[J].自动化技术与应用,2013,32(2):72-75.
猜你喜欢
今日农业(2022年3期)2022-11-16
今日农业(2021年10期)2021-07-28
中国生殖健康(2020年4期)2021-01-18
微特电机(2020年11期)2020-12-30
小天使·一年级语数英综合(2019年12期)2019-01-13
中国生殖健康(2018年4期)2018-11-06
电子制作(2018年17期)2018-09-28
电子制作(2016年1期)2016-11-07
燕山大学学报(2015年4期)2015-12-25
小天使·三年级语数英综合(2014年9期)2014-09-12
