基于改进Hausdorff距离的雷达图像与电子海图匹配算法
2018-04-12 06:14易成涛
指挥控制与仿真 2018年2期
易成涛, 徐 飞
(海军大连舰艇学院, 辽宁 大连 116018)
雷达图像和电子海图是舰船航行的重要信息来源。但是单独使用雷达搜索具有目标识别困难、目标录取局限性大、目标跟踪失误率高等问题。其次,雷达必须与北斗/GPS配合使用,才能够完成本舰和目标位置信息的确定,而单纯使用电子海图不能直观显示本舰与目标相关位置信息。因此,本文提出将雷达图像与电子海图匹配后使用,综合两种航行仪器的优势,在北斗/GPS故障或受干扰条件下,为保证舰艇安全和舰载武备正常使用提供有效航海保障,具有一定的实际应用价值。
目前图像匹配大致可以分为基于灰度的图像匹配、基于特征的图像匹配和基于理解与解释的图像匹配三大类。鉴于雷达图像存在噪声干扰、灰度变化大和目标遮挡缺失严重的现象,本文深入研究了基于Hausdorff距离的特征图像匹配算法[1-2]。
Hausdorff距离匹配方法是一种模糊的点集之间的匹配方法,它不需要建立两个图像之间特征点的一一对应关系,而是通过计算两个图像之间特征点集的最大距离来实现。雷达图像与电子海图进行匹配时不可能实现两个图像的特征点数相等,更不可能实现一一对应的关系,因此采用本文的研究方法可以使雷达图像与电子海图的匹配更好[3-4]。
1 传统Hausdorff距离算法
采用L1×L2维电子海图抽取海岸线或者物标轮廓线图像作为待匹配图像,M1×M2维雷达图像作为模板图像,经过特征提取后生成两个有限特征点集L={l1,l2,…,lp}和M={m1,m2,…,mq}。M和N的Hausdorff距离(HD,Hausdorff Distance)公式定义如下[5]:
H(M,L)=max(h(M,L),h(L,M))
(1)
其中h(M,L)和h(L,M)分别为Hausdorff的有向距离,具体公式如下[6]:

(2)

(3)

2 Hausdorff距离算法改进形式
以下所有的Hausdorff距离改进形式都是通过有向距离公式的改进得来的,这里只陈述前向Hausdorff距离的改进形式。
1)Huttenlocher[7-8]等人提出了部分Hausdorff距离的改进形式,其中,有向距离改进公式定义如下:
(4)

2)Dubuisson和Jain[9-10]提出平均Hausdorff距离(MHD, Modified Hausdorff Distance),其有向距离改进公式如下:
(5)
MHD计算公式比较简单易懂,直接利用平均值来求得有向距离,但是图像中的噪声也参与了计算,对于雷达图像来说,难以提取有向距离。
3)Azencott[11]提出有限Hausdorff距离(CHD,Censored Hausdorff Distance),其有向距离改进公式定义如下:
(6)

4)Sim[12]等人提出M-HD(M-estimation Hausdorff Distance)的改进形式,其有向距离改进公式如下:
(7)
公式中的ρ称为代价函数,其公式定义如下:

由上述公式可以得知,M-HD是对MHD的一个扩展,增加了一个代价函数ρ,通过其中阈值τ的设定来减少误差的影响,当τ取无限大时公式则变成MHD,因此M-HD的结果取决于τ值的设定。
3 Hausdorff距离改进算法
上述提出的Hausdorff距离改进公式是通过对求得的部分结果进行平均或者对其进行排序,以达到将部分虚假处理结果(较大距离)剔除的效果。本文深入研究了雷达图像的特点,提出了一种新的Hausdorff距离改进公式IHD(Improved Hausdorff Distance),它整体分析了雷达图像存在的噪声干扰、孤立点、遮挡等多方面因素,综合了平均和排序的优点,其有向距离改进公式如下:
(8)
(9)
其中β同前面M-HD中的τ类似,通过设定阈值来消除噪声和误差,不同的是当dL(m)>β时,本文采取的算法将直接予以剔除,不参与后续的运算,以减少误差的存在。ρ(dL(m))(i)是将ρ(dL(m))剔除误差后进行从小到大排列取第i个值。当点集M′为空集时,定义有向距离为无穷大,最后求得的Hausdorff距离也会直接被忽略。
本文改进的Hausdorff距离公式全方面考虑了噪声、遮挡、孤立点等影响因素,通过α值的设定,将遮挡问题有效解决,通过β值的设定将噪声和孤立点等求得较大值的Hausdorff距离有效删除。通过这两种手段在一定程度上很好地解决了噪声等误差的影响,但是由于本算法引入了两个阈值的设定,因此计算比较复杂,匹配时间较长,采用传统的遍历寻优的搜索策略已经不能满足舰船实时匹配定位的需求,因此本文分析采用了遗传搜索策略,以便提高匹配速度。
4 改进Hausdorff距离可行性分析
为了验证本文提出的改进Hausdorff(IHD)距离算法的可行性与有效性,下面将IHD算法与传统HD算法进行了试验比较。
测试图片来源于某海区的电子海图如图1所示,附近海区雷达图如图2所示,现将图2中提取出的海岸线边缘截取一段作为模板图像4a),位置(112,64),图像大小为35×35。如图4所示,为模拟雷达噪声与孤立点的影响,在模板图像4a)中人为添加三个噪声点,如图4b)所示;为模拟目标变形遮挡问题,人为减少三个点,如图4c)所示。准确匹配结果如图3所示,图像大小为340×261。匹配结果比较如表1所示。

图1 某海区电子海图

图2 海区雷达图像

图3 准确匹配结果

图4 匹配模板图像
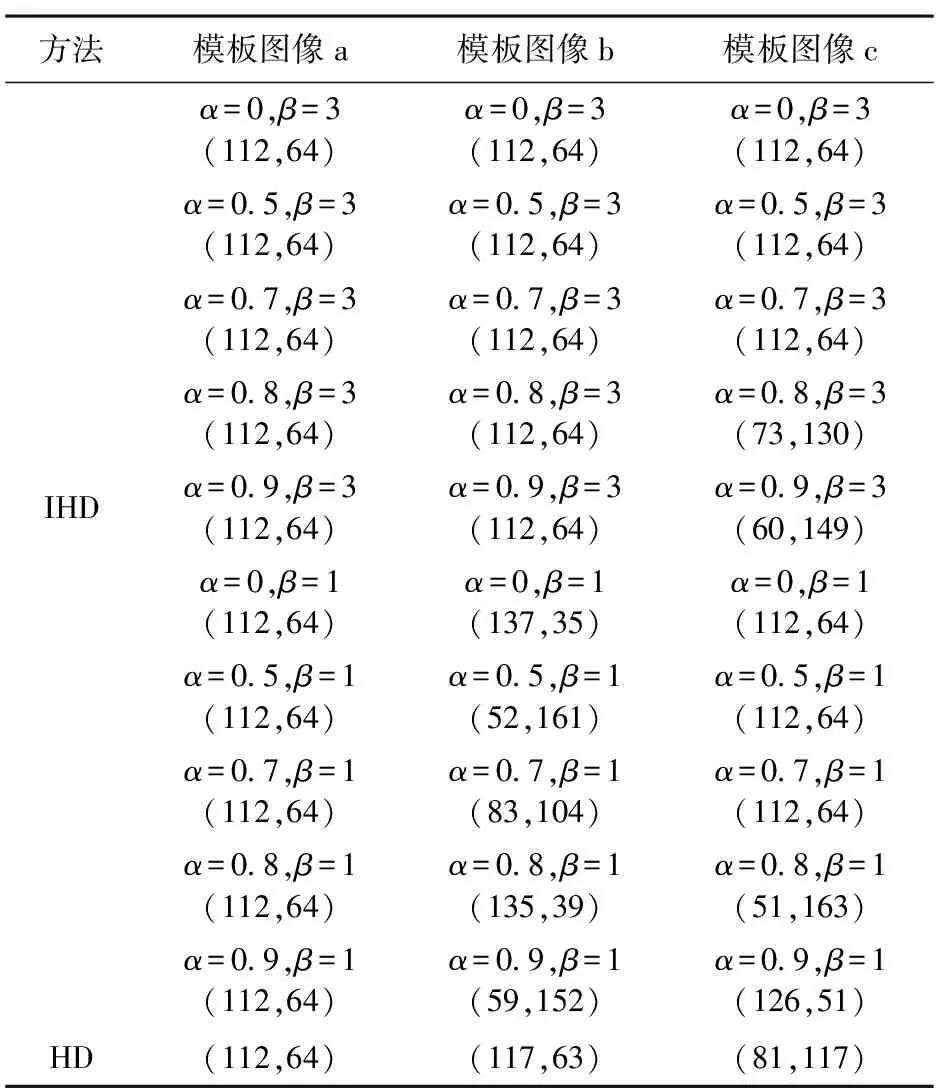
表1 IHD与HD比较
由上述试验结果可以得知,当采用图像出现噪声和缺失影响时,传统的Hausdorff距离匹配无法找到准确的匹配位置,但是本文提出的改进型Hausdorff距离匹配方法,在合适的参数设定下可以在这些影响下找到准确的匹配位置。
同时,试验通过设定不同的参数α和β,来研究对图像匹配的效果。通过多次试验可以得出:当模板图像未发生任何改动时如图4a),参数α和β对于匹配效果没有什么影响;当模板图像出现噪声时如图4b),相比较而言,参数β比参数α更加重要,需要选取适当的β才能够得到准确的匹配结果,参数α对于结果的影响较小;当模板图像出现缺失时如图4c),参数α对于匹配至关重要,只有选择恰当的α取值范围才能够完成匹配,经过后续试验证明,模板图像缺失越严重,α取值就越大。值得注意的是:缺失现象比噪声现象更加影响最终的匹配结果。
5 结束语
本文在部分Hausdorff距离的基础上进行了改进,提出了α和β两个参数对于匹配的限制,试验证明,改进型Hausdorff距离匹配方法相比传统Hausdorff距离方法,在雷达图像出现噪声和目标图像缺失现象时,能够更好地完成图像匹配。但是本方法还存在不完善之处,由于采用的模板匹配方法,对于雷达图像严重变形的影响还需要做进一步研究论证。
参考文献:
[1]邱志敏,李军,葛军,等.基于Hausdorff距离的自动目标识别算法的研究[J].红外技术,2006,28(4):199-202.
[2]张腾飞,张合新,孟飞,等. 改进Hausdorff距离和量子遗传算法在激光制导中的应用[J]. 激光技术,2016,(40):320-325.
[3]邱倩文. 基于Hausdorff距离和遗传算法的水下图像匹配技术研究[D].武汉:武汉工程大学,2016.
[4]邱天爽,张颖. 结合图像局部信息和Hausdorff距离的活动轮廓模型医学图像分割算法[J]. 信号处理,2015,31(11):1489-1496.
[5]郑晓璐,潘广贞,杨剑,等. 基于Hausdorff距离改进的ICP算法[J]. 计算机工程与设计,2015,(9):2481-2484,2489.
[6]路游,郭江涛,孟庆鑫. 基于Hausdorff距离的图像边缘检测方法[J]. 计算机技术与发展,2015,(8):71-74,79.
[7]Huttenlocher.D.P, Klanderman.G.A, Rucklidge.W.J. Comparing images using the Hausdorff distance[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence,1993,15(9):850-863.
[8]李志军,刘松林,牛照东,等. 基于梯度相位和显著性约束的Hausdorff距离模板匹配方法[J]. 红外与激光工程,2015,44(2):775-780.
[9]Dubuisson.M.p,Jain.A.K.A modified Hausdorff distance for object matching[J].Pattern Recognition,1994(1):566-568.
[10] 杨飚,周阳. 基于改进Hausdorff距离和人工蜂群算法的图像匹配[J]. 微型机与应用,2014,33(22):43-46,50.
[11] Azencott.R, Durbin.F, Paumard.J. Multiscale identification of building in compressed aerial scenes[A].In:Proceedings of 13thInternational Conference on Pattern Recognition, vienna, Austria,1996:74-97.
[12] Sim.D.G, Kwon.O.K, park.R.H. Object matching algorithm using robust Hausdorff distance measures[J]. IEEE Trans actions on Image Processing,1999,8(3):425-429.
猜你喜欢
微型电脑应用(2022年3期)2022-04-20
航海(2020年4期)2020-08-17
计算机与网络(2020年7期)2020-05-15
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
少林与太极(2018年9期)2018-09-28
航海(2017年3期)2017-06-09
小学生导刊(高年级)(2016年11期)2016-11-14
航海(2016年5期)2016-10-11