
基于多特征融合的图像匹配研究
2022-04-20 13:09:18鲁家皓张捷胡国胜唐智
微型电脑应用 2022年3期
鲁家皓, 张捷, 胡国胜, 唐智
(1.上海电子信息职业技术学院,教师工作部/人事处,上海 201411;2.上海大学,机电工程与自动化学院,上海 200436;3.上海电子信息职业技术学院,通信与信息工程学院,上海 201411;4.东华大学,机械工程学院,上海 201620)
0 引言
随着多媒体技术的不断发展,每天都会产生大量的图像,图像处理技术在许多领域得到广泛的应用,如医学影像、飞行轨迹、军事等[1-3]。在图像采集过程中,由于多种因素的影响,单一幅图像无法完整描述目标的信息,为了更好地描述目标信息,可以采用多幅图像进行匹配,得到一幅更加完整的图像,因此这种图像匹配成为当前研究的重点[4-5]。
针对图像匹配问题,一些发达国家学者进行了长期的研究,提出了许多有效的图像匹配方法,图像匹配技术十分成熟,而国内图像匹配的研究时间比较晚,亦取得了相当多的成果,但是还有许多问题有待解决[6]。当前图像匹配方法可以划分为2类:一类是基于灰度信息的图像匹配方法,该类方法首先将图像转换为灰度图像,并根据灰度信息计算两幅图像之间的相似度,从而得到图像匹配结果,该类方法的图像匹配时间短,图像匹配效率高,但是图像匹配的错误点比较多,难以获得高精度的图像匹配结果[7-9];另一类方法是基于特征的图像匹配方法,首先提取图像的角点、边缘等特征,然后根据特征进行图像匹配,该类方法对图像的旋转、尺度缩放等鲁棒性强[10-12],但是由于通常情况下图像的特征比较多,当前主要采用单一特征进行图像匹配,无法获得理想的图像匹配结果,图像匹配正确率低[13-14]。
传统图像匹配方法存在误差大、效率低等问题,为了获得理想的图像匹配结果,本文设计了基于多特征融合的图像匹配方法,在相同实验环境下,与其他方法进行了图像匹配的仿真实验。结果表明,本文方法提高了图像匹配精度,缩短了图像匹配的时间,具有十分明显的优越性。
1 多特征融合的图像匹配方法
1.1 图像的预处理
(1)
(2)
式中,a和b为收缩与平移因子。
小波分析系数的计算式为
(3)
小波分析重构形式为
(4)
图像属于离散信号,这样连续小波无法进行直接处理,为此需要对连续小波进行离散化操作:
(5)

这样可以得到离散化小波分析系数的计算式为

(6)
相应的离散化小波变换重构可以表示为
(7)
1.2 提取图像特征
1.2.1 LBP特征
在图像匹配过程中,需要提取特征,根据特征实现图像之间的匹配,因此特征提取十分关键,直接影响到图像匹配的结果。
当前图像匹配特征很多,局部二值模式(LBP)特征可以描述图像灰度变化特点,为此采用LBP特征进行图像匹配。图像一个像素灰度值为pf,它与邻域内N个像素点的灰度值有关联,那么该像素的LBP特征可以表示为
L=e(pf,p1,p2,…,pN)
(8)
不同像素的灰度值差别比较大,这样灰度差能够更加准确反映出图像灰度变化特点,这样LBP特征为
L=e(pf,p1-pf,p2-pf,…,pQ-pf)
(9)
通常情况下,中心像素与其他像素之间存在一定的独立性,这样有
L=e(pf)e(p1-pf,p2-pf,…,pQ-pf)
(10)
忽略中心像素点灰度值,中心像素点的LBP特征为
L≈e(p1-pf,p2-pf,…,pQ-pf)
(11)
灰度差值有正负之分,对其进行变换得到
L=e(u(p1-pf),u(p2-pf),…,u(pQ-pf))
(12)
其中:
(13)
最后图像的像素点LBP特征可以表示为
(14)
1.2.2 边缘特征
对于一幅图像f(x,y),边缘特征也是一个十分重要的特征,采用Zernike算法提取图像的边缘特征,图像的n阶m次Zernike可以表示为
(15)
进行图像边缘检测时,通常采用Z00、Z11和Z203个阶次的Zernike不变矩,对图像f(x,y)进行旋转后得到图像f′(x,y),那么满足条件式(16),
(16)

(17)
式(17)中,图像旋转角度计算式为
(18)
Zernike不变矩对图像旋转鲁棒性强,如图像幅值不变,则有
(19)
Z00、Z11和Z20的积分核函数分别为
U00=1
(20)
U11=x+jy
(21)
U20=2x2+2y2-1
(22)
旋转图像的各阶Zernike矩计算式如式(23)~(25):
(23)
(24)
(25)
由上述公式可以得到图像匹配的Zernike不变矩特征,即图像匹配的边缘特征。
1.3 图像匹配算法
由于单一LBP特征和Zernike不变矩特征无法获得理想的图像匹配结果,因此本文利用两者的优势,首先采用LBP特征进行图像粗匹配,然后采用Zernike不变矩特征进行图像精匹配,以获得理想的图像匹配结果。
1.3.1 LBP特征的图像粗匹配
对待匹配的图像进行LBP特征提取后,就可以对它们两者的LBP特征进行匹配,实现图像的粗匹配,本文选择用最近距离与次近距离比法进行粗匹配。设P1、P2为图像1、图像2的LBP特征,那么两者之间的距离计算式为
(26)
其中,Descri为LBP特征向量。
根据式(26)计算待匹配的图像的全部特征点的距离,设最近距离与次近距离比为Rod,如果Rod≤0.6,那么表示2个特征点匹配成功,不然就匹配失败。
1.3.2 边缘特征的图像精匹配
(1)采用Zernike算法提取待匹配的图像Zernike不变矩特征。
(2)根据Zernike不变矩对图像进行匹配,实现精匹配。
2 图像匹配方法性能的仿真测试
2.1 实验对象及实验环境
选择文献[13]、文献[14]和文献[15]方法,进行对比实验,共进行5次图像匹配实验,每一次匹配实验选择的匹配图像如表1所示。进行仿真实验计算机参数为Intel 4核3.0 GHz CPU,内存为32 GB,编程工具为MATLAB 2017a。
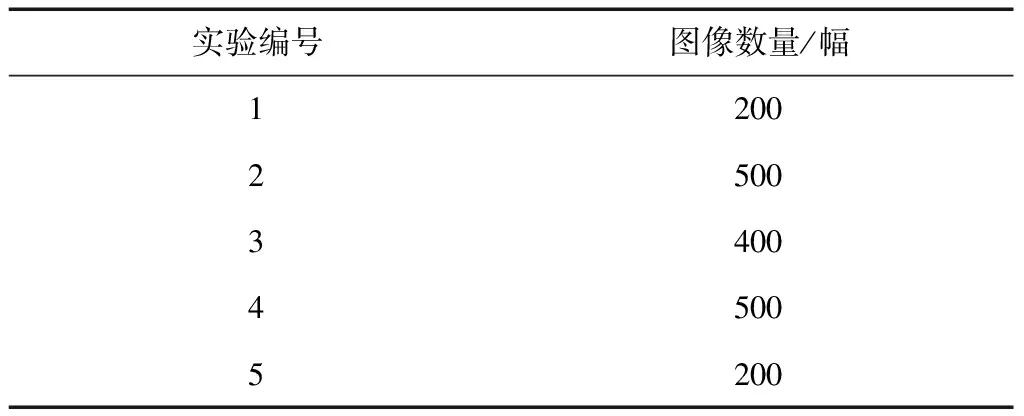
表1 每次仿真实验的图像匹配数量
2.2 实验结果与分析
统计不同方法的图像匹配时间,结果如表2所示。由表2可以看出,与其他3种方法相比,本文方法的图像匹配时间最少,加快了图像匹配速度,具有更加广泛的应用范围。
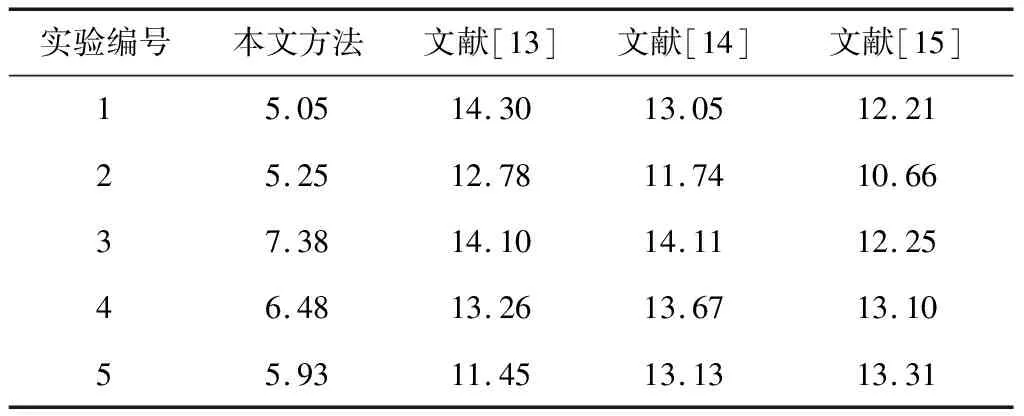
表2 图像匹配平均时间对比 单位:s
统计不同方法的图像匹配精度,结果如图1所示。由图1可以看出,与其他3种方法相比,本文方法的图像匹配精度最高,有效降低了图像匹配错误率,具有明显的优越性。

图1 不同方法匹配精度对比图
为了测试图像匹配方法的整体性能,统计不同方法的图像匹配错误率,结果如图2所示。对图2的图像匹配错误率进行分析可以看出,不同的实验,本文方法的图像匹配错误率始终小于对比方法,获得了十分理想的图像匹配结果。

图2 不同方法的图像匹配错误率
3 总结
传统图像匹配方法存在误差大、效率低等问题,为了获得理想的图像匹配结果,提出基于多特征融合的图像匹配方法。首先采集待匹配图像,并对它们进行预处理,去除一些无用的噪声,然后从图像中提取灰度特征和边缘特征,最后根据这些特征进行图像粗匹配和精匹配,并与其他方法的图像匹配仿真实验,结果表明本文方法是一种精度高、耗时少的图像匹配方法,具有更高的实际应用价值。
猜你喜欢
中国卫生统计(2023年5期)2023-11-30 01:40:14
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
计算机测量与控制(2017年6期)2017-07-01 16:23:31
自动化学报(2017年5期)2017-05-14 06:20:56
教师·中(2017年3期)2017-04-20 21:49:49
光学精密工程(2016年1期)2016-11-07 09:01:59
试题与研究·教学论坛(2016年27期)2016-08-11 14:57:08
集美大学学报(自然科学版)(2015年1期)2015-02-28 01:13:32
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:46
