
火星探测VLBI测定轨技术
2018-04-11 10:31刘庆会
深空探测学报 2018年5期
刘庆会
(中国科学院 上海天文台,上海 200030)
引 言
我国将于2020年首次发射由环绕器和着陆巡视器组成的火星探测器,一次发射实现“环绕”“着陆”“巡视”3个探测目标。火星探测器经过约7个月巡航飞行进入近火制动。环绕器环绕火星飞行后与着陆巡视器分离进入任务使命轨道,着陆巡视器着陆在火星表面进行科学探测。火星探测器的跟踪及精密测定轨是完成工程任务和科学探测的基础[1-2]。
火星探测器的跟踪和测定轨,目前主要采用基于地面无线电测量的测距、测速和甚长基线干涉(Very Long Baseline Interferomety,VLBI)测角3种手段。VLBI对与视线垂直方向上的探测器的位置变化有很高灵敏度,与视线方向具有高灵敏度的测距、测速形成互补,是火星探测器测定轨的必要手段,特别是在地火转移段、近火制动段等测定轨难度较大的测控弧段的优势更为明显。
火星探测器的跟踪及精密测定轨比我国已经开展的月球探测难度更高。火星距离地球最远约4亿km,单程延时最大1 334 s。利用波束较窄的地面大型望远镜跟踪探测器时,需要考虑延时期间内探测器在与视线垂直方向上的移动距离即光行时的影响,并改正望远镜的跟踪方向,以保证望远镜的良好接收能力。
由于距离遥远,对VLBI测定轨技术提出了更高要求。探测器进入近火制动段时,地火距离一般达到2.0亿km,与月球探测器捕获时的38万km相比,距离增加了500多倍。比如,VLBI时延测量误差1 ns(0.3 m),在3 000 km的基线长度上,对2亿km以远的火星探测器的与视线垂直方向的单点测轨误差约为2亿km/3 000 km ×0.3 m = 20 km,远大于视线方向的约5 m的测距误差。VLBI时延测量精度的提高是火星探测器测定轨精度提高的关键环节。
为了提高VLBI时延测量精度,火星探测时一般采用△DOR型VLBI技术,即交替观测河外射电源和火星探测器,并利用射电源的相关相位改正探测器的相关相位,从而大幅降低大气、电离层、观测装置时延等这些公共误差的影响。△DOR技术已成为美国和欧洲深空探测器测定轨的基本方法,在欧美近20年发射的火星探测中,每次任务均利用了△DOR技术。比如,美国2011年发射的“好奇号”(Curiosity)火星车的△DOR型VLBI时延测量误差最低降至0.04 ns,在2亿km远的近火制动段,其天平面内的约束能力达到约400 m。利用VLBI和测速测距数据,“好奇号”火星车在B平面的定轨精度达到了约200 m[3]。
在“嫦娥3号”等任务中,我们利用由上海65 m(天马望远镜)、北京50 m、昆明40 m和乌鲁木齐25 m射电望远镜组成的中国科学院VLBI网和△DOR技术,把VLBI时延测量误差降至0.67 ns[4-5]。结合测速和测据数据,着陆器月面测定位和环月段的测定轨误差约50 m,地月转移段和近月制动段的测定轨误差数100 m[6-7]。VLBI测量精度与欧洲空间局(ESA)相当,和NASA相比还有一定差距。
△DOR型VLBI技术适合于单个探测器测定轨,而同波束VLBI技术则适合于多个探测器的精密测定轨。同波束VLBI即利用射电望远镜的主波束同时观测角距小于望远镜波束宽度的两个(或多个)探测器,得到每个探测器信号的相关相位并在测站和探测器间进行两次差分,从而除去太阳等离子体、地球大气和电离层及观测装置内部时延的绝大部分影响,得到更高精度的差分时延观测量[8-9]。在“嫦娥3号”的轨道器和月球车的同波束VLBI中,得到了随机误差小于1 ps的差分相时延数据,并利用此数据以0.1 m的灵敏度监测出月球车的移动、转弯等动作,把月球车的相对定位精度提高至1 m。同波束VLBI技术同样适合于火星车定位和环绕器定轨。基于我国研发的火星车和轨道器的联合定轨定位软件的仿真分析结果表明,利用弧长数小时的环绕器测距以及火星车和环绕器的同波束VLBI差分相时延数据,有望实现误差数百米的火星车定位和误差数十米的环火探测段的环绕器定轨。
本文主要内容包括:△DOR型VLBI技术在国内外的应用情况、火星探测器VLBI测定轨技术分析、基于同波束VLBI的火星车定位分析、火星探测器的VLBI观测。这些内容对我国的火星探测器VLBI测定轨有重要的应用价值。
1 △DOR 型VLBI技术在国内外的应用情况
由于VLBI其对与视线垂直方向上的探测器的位置和速度变化具有很高灵敏度,在深空探测器测定轨中被广泛应用。美国和欧洲近期的所有深空探测器,均利用了△DOR型VLBI技术进行测定轨。作为一个成功的应用案例,“好奇号”火星车MSL的2程测速测距和△DOR测量由位于澳大利亚堪培拉、美国加利福利亚和西班牙马德里的口径70 m和34 m的深空站执行。测速、测距和△DOR的测量误差分别达到0.1 mm/s、1 m、0.04 ns。实际的测量频度为:测速测距测量频度高,每日连续测量或每周测量5次。△DOR测量频度略低,地火转移段每周1~2次,近火制动段加强观测,每天2次。利用上述测速测距和△DOR数据,在2亿km远的火星捕获段,其天平面内的约束能力达到约400 m,实现了火星探测器目前最高的测定轨精度。
我国在“嫦娥2号”中验证了△DOR技术,“嫦娥3号”正式利用△DOR技术进行工程准实时测定轨。“嫦娥3号”着陆器在2013年12月的奔月段、环月段和落月初期,发射两组DOR信号用于VLBI测定轨。我们对“嫦娥3号”和邻近射电源进行5 min左右的交替观测,并对相关相位进行差分除去了大气、电离层及装置内部时延的大部分影响。同时利用GPS数据和气象数据等进一步减小大气和电离层时延的影响。如图1所示,“嫦娥3号”着陆器两组DOR信号以载波频率为中心,分别调制 ± 65 kHz的遥测信号、± 0.5 MHz的测距信号、± 3.8 MHz和 ± 19.2 MHz的DOR信号。在“嫦娥3号”奔月段、环月段和落月初期的VLBI观测中,利用带宽2 MHz的4个通道分别记录主载波:fc和fc-19.2 MHz、fc+ 3.8 MHz、fc+ 19.2 MHz的DOR信号。首先利用主载波、± 65 kHz的遥测信号和 ± 0.5 MHz的测距信号解算单通道内的时延,再以此为基础并综合考虑4个通道的相关相位,利用带宽综合方法求出38.4 MHz带宽的VLBI群时延。利用主载波fc的相关相位解算VLBI时延率。
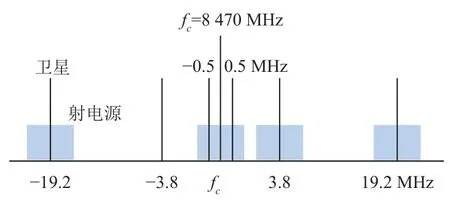
图1 主载波、DOR信号和测距信号Fig.1 Main carrier,DOR and ranging signals
图2为北京50 m、昆明40 m、乌鲁木齐25 m、上海天马65 m测站在2013年12月9日接收记录的“嫦娥3号”主载波fc、遥测信号和测距信号。利用主载波和噪声的强度,计算得到的北京、昆明、乌鲁木齐、天马测站的主载波信号的信噪比分别为18.6、19.7、10.8、27.0 dB,可明显看出大型望远镜天马站接收信号的信噪比最大。主载波信号相位用来求取时延率,主载波通道内的所有信号用来求取本通道内的VLBI时延。
图3给出了“嫦娥3号”定轨后的VLBI时延残差,它是利用4个测站6条基线的定轨后的时延残差的均方根计算得出的。“嫦娥3号”共有12天的△DOR型VLBI观测数据,奔月段4天、环月段8天。12天的VLBI时延残差在0.4~1.0 ns之间,其平均值为0.67 ns。利用VLBI时延和测速测距数据,“嫦娥3号”地月转移段定轨误差为数百米,环月段的定轨误差为20~30 m。同时,利用VLBI数据和统计定位方法确定了着陆器在月面的位置,定位精度约50 m。
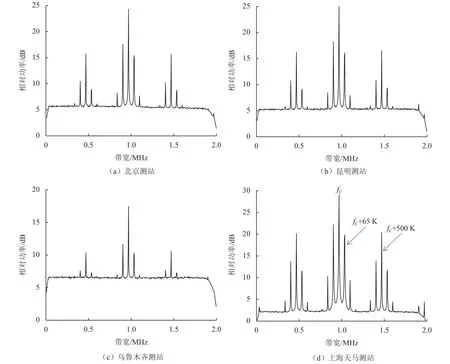
图2 接收的“嫦娥3号”DOR信号主载波、遥测信号和测距信号Fig.2 CE-3 main carrier,DOR,telemetry and ranging signals received
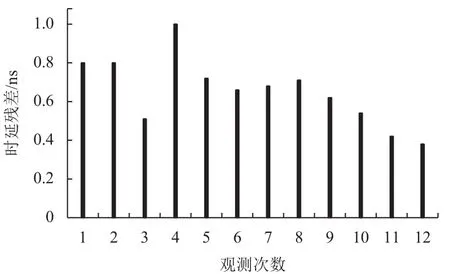
图3 “嫦娥3号”定轨后的VLBI时延残差Fig.3 CE-3 VLBI delay residual after orbit determination
2 火星探测器VLBI测定轨技术分析
由于星地距离遥远,火星探测器的跟踪需要考虑延迟时间Δt内的探测器在与视线垂直方向上的移动距离即光行时的影响,这点与月球探测器不同。如图4所示,在VLBI观测时,地面望远镜在t0时刻接收到的信号,实际上是t0-Δt时刻探测器发射的信号。所以,在波束较窄的大型射电望远镜接收探测器的信号时,应该让望远镜指向t0-Δt时刻的探测器的位置。
以2020年7月发射的火星探测器为例,分析了该探测器在近火制动、平面机动、降轨前等各测控弧段的与探测器跟踪有关的参数。由于星地距离达到1.9~2.9亿km,延迟时间Δt为641.5~975.5 s,探测器的横向移动距离对应的角度θ为15.0~25.0′′。而上海65 m射电望远镜X频段波束宽度的1/10约为12.39"。所以,利用大型射电望远镜进行观测时,为了保证接收能力,需要考虑光行时的影响。对于天线口径66 m的佳木斯深空站来说,由于其需要进行2程测速测距和遥测遥控,下行接收时需要跟踪t0-Δt时刻的探测器的位置,上行发射时需要跟踪t0+Δt时刻的探测器的位置,否则会降低接收和发射的能力。欧洲航天局的35 m深空站在Ka波段(32 GHz)跟踪水星探测器BepiColombo时,充分考虑了上下行同时跟踪的问题。他们通过自动调整望远镜内部设置的上行链路中一个反射镜的位置,实现了望远镜上行和下行的不同指向和上下行同时跟踪。
为了验证指向偏差引起的射电望远镜接收能力下降的实际情况,利用火星快车(Mars Express,MEX)和火星勘测轨道器(Mars Reconnaissance Orbit,MRO)的精密星历和上海65 m射电望远镜,分别在考虑光行时和不考虑光行时两种状态下进行了跟踪,并测试比较了两种情况下的接收信号的强度。结果表明,在不考虑光行时的接收信号的功率比考虑光行时低0.8 dB左右。 利用天马望远镜,在改正了结构变形引起的指向偏差、大气折射、光行时引起的指向偏差后跟踪火星探测器MEX,通过扫描找到接收信号最强的位置并改正残余的指向偏差。在此基础上,再人为地在俯仰方向上给予偏差,测量接收信号功率的变化和俯仰偏差的关系。图5 给出了测试结果。由图5可知,在俯仰偏差为 ± 36"时,接收能力降低约0.8 dB。在俯仰偏差为 ± 72"时,接收能力降低约3.5 dB。
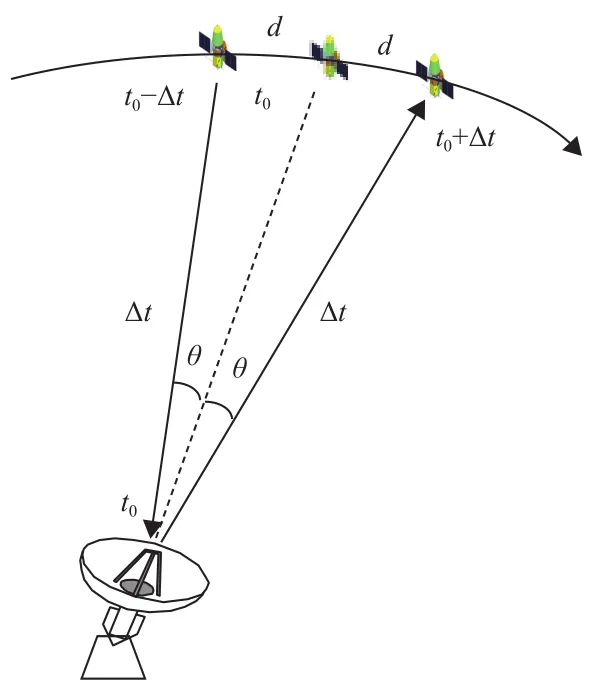
图4 火星探测器跟踪示意图Fig.4 Tracking of Mars spacecraft
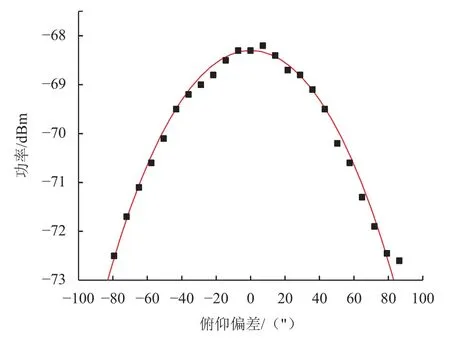
图5 人为施加俯仰偏差情况下的接收功率的衰减(黑点)和理论曲线(红线)Fig.5 Power reduction of the received signal with elevation offset(black spots)and theoretical curve(red line)
分别利用5天的测速测距数据、测速测距+VLBI数据进行定轨并预报2天至近火制动点的定轨误差和近火点高度预报误差。在加上VLBI数据后,三维定轨误差由只用测速测距时的45.7 km降至18.8 km,速度误差由322.9 m/s降至120.9 m/s,近火点高度预报误差由28.2 km降至7.6 km,充分体现了VLBI在近火制动等关键测控弧段对定轨和轨道预报精度提高的贡献。
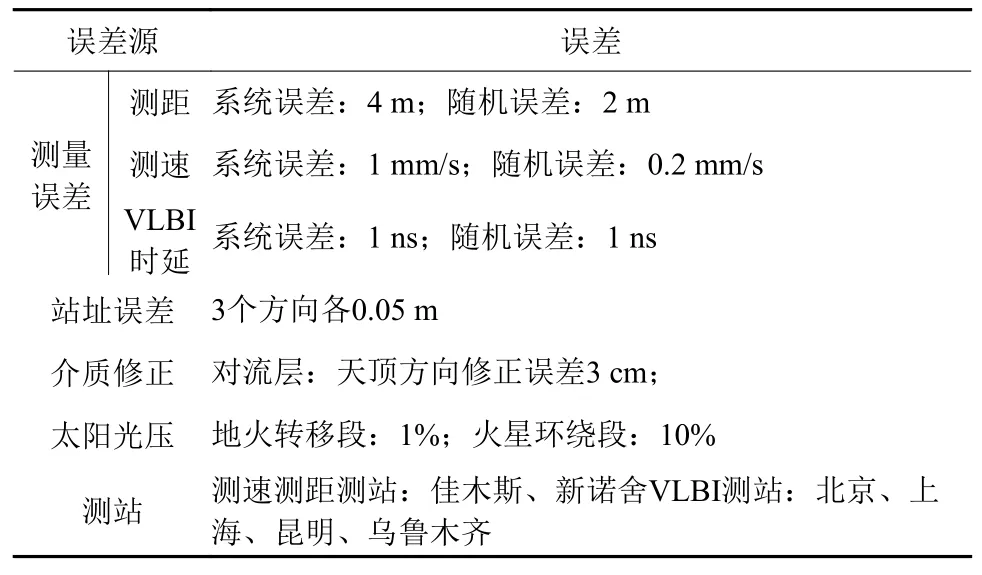
表1 仿真用的导航观测数据与我国测控网能够实现的测量误差Table 1 Navigation data and measurement error that can be realized for simulation
3 基于同波束VLBI的火星车定位技术
火星车和环绕器的同波束VLBI观测即利用望远镜的主波束同时接收火星车和环绕器的信号,求取相关相位后再在两器间进行差分,得到差分时延观测量(见图6)。地面射电望远镜的波束宽度η与接收信号的波长λ及射电望远镜的口径D有关其中,α范围为1~1.22。在X频段的8 500 MHz观测时我国VLBI网口径最大的上海65 m和最小的上海25 m射电望远镜的波束宽度分别为0.038°和0.1°,对应到最近距离5 500万km的火星处,可进行同波束VLBI观测的范围分别为36 475 km和95 986 km。所以,对于直径6 794 km火星表面的火星车和轨道高度数千千米的环绕器来说,一直能进行同波束VLBI观测。
火星车和环绕器的同波束VLBI差分时延测量模型如下

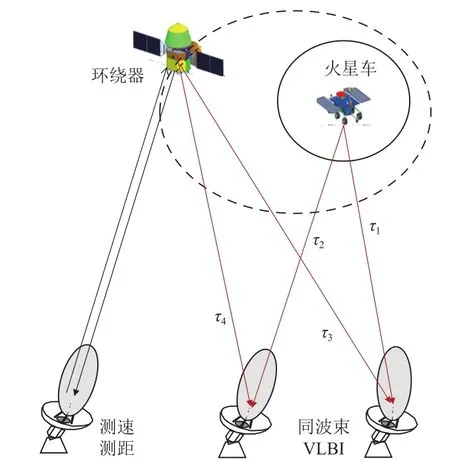
图6 火星车和环绕器的同波束VLBI,以及环绕器的测速测距观测Fig.6 Same-beam VLBI observation between a Mars rover and an orbiter,and ranging and Doppler measurement of the orbiter
其中:τR为火星车到两个测站的时延;τO为环绕器到两个测站的时延。火星车相对于环绕器的残余差分相时延Δτpd(t)为

其中:φR(t)、φO(t)分别为火星车和环绕器的相关相位;fR、fO分别为对应的射频频率。差分相时延随机误差为ps量级,但含有整周模糊度C,主要由φR(t)和φO(t)中的整周模糊度引起。在一个连续的观测弧度内,只含有一个固定的系统差。当观测弧段长度为数小时,系统差可在火星车和环绕器联合定轨定位过程中解算出来。
在火星探测中,可以利用同波束VLBI技术对火星车和环绕器进行联合定轨和定位,以提高火星车的定位精度和环绕器的定轨精度。研发了火星车和环绕器联合定轨和定位软件,并利用环绕器的测距数据以及火星车和环绕器的同波束VLBI观测数据仿真分析了火星车定位和轨道器定轨的精度。
仿真条件为:火星车位于北纬45.0°、西经30°、高程为-3 000.0 m;环绕器位于300 km × 2 000 km的椭圆轨道。仿真测量数据为:环绕器的测距数据的随机误差3 m、系统误差10 m,弧长2 h。环绕器和火星车VLBI差分相时延误差为3 mm,弧长1 h。定轨定位弧段长度为3 h。动力学模型为:火星重力场模型阶数为80 × 80,N体摄动考虑太阳、地球及大行星的影响,并考虑光压摄动的影响等。
火星车定位的仿真结果为,纬度和经度方向上的定位误差分别为0.002 444°和0.004 444°,对应到火星表面上的位置误差分别为103 m和264 m。火星质心方向的高程误差为-226 m。环绕器定轨的仿真结果为,径向R、延迹向T、法向N的位置最大误差分别为10 m、80 m、30 m。即利用环绕器的测距数据以及火星车和环绕器的同波束VLBI观测数据,可以实现火星车的绝对定位,其定位误差为数百米。同时可以实现环绕器的高精度定轨,位置误差为数十米。本方法适用于火星车在各个停泊点的定位,并要求火星车停泊时间1 h以上。
4 火星探测器的VLBI观测
首先利用天马望远镜,对火星探测器进行了跟踪测试。图7给出了天马望远镜2017年3月28日接收到的在轨火星探测器信号的频谱图。频谱仪参数设置为,RBW为30 Hz,VBW为20 Hz。本次观测共接收到了3个火星探测器的信号,分别为Mars Odyssey、EXOMars(Exobiology on Mars)、MRO,在其他观测时间段还接收到了MEX卫星的信号。Mars Odyssey信号的中频频率为8 406.6 MHz、信噪比约20 dB,EXOMars信号的频率为8 410.4 MHz、带宽约2.0 MHz、信噪比约12 dB,MRO信号频率为8 439.1 MHz、带宽约2.5 MHz、信噪比约30 dB。MRO的信号从约8 428 MHz至约8 452 MHz间有频率间隔约2 MHz的13个谐波分量,信噪比10~22 dB。由于火星距离遥远,几乎所有的火星探测器都会被射电望远镜的主波束同时观测到。所以,在设计我国的火星探测器的测控和数传频率时,要充分考虑到现有和将要发射的所有火星探测器的信号频率的兼容性,以免相互干扰。
2017年3月29日,利用天马和昆明测站对火星探测器MEX和临近射电源进行了VLBI观测。观测频段为X波段,数据采集和记录终端的采样率为4 MHz、带宽2 MHz、量化2比特。上海VLBI数据处理中心对天马和昆明测站的VLBI原始观测数据进行了相关处理。相关处理时使用了MEX的精密轨道进行时延预测值计算。
图7给出了天马测站接收到的MEX信号频谱,谱分辨率为1 955 Hz。可以看到天马测站信号的信噪比约为19 dB。另外,从天马测站接收的信号中,可清晰看出MEX信号的频谱特征,充分证明了在改正各种跟踪误差后,可以利用口径65 m的天马望远镜等大型射电望远镜有效地跟踪火星探测器。
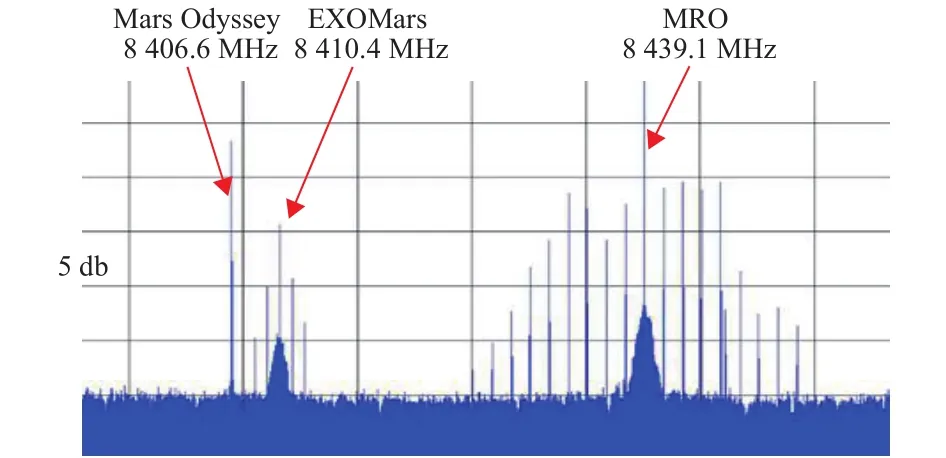
图7 天马望远镜接收到的在轨火星探测器信号的频谱图Fig.7 Spectra of Mars in-orbit spacecraft signals received by using Tianma telescope
图8和图9给出了昆明-天马基线上的MEX探测器的VLBI相关相位及拟合残差。在0.4 h的时间内,相关相位由40 rad变化至-40 rad。拟合残差是对相关相位进行5次多项式拟合得到的。拟合残差有明显的周期项,幅度约为 ± 0.5 rad,周期约为2 min,主要由MEX的轨道变化引起。本次观测证明了我国VLBI网和数据处理系统具有对火星探测器VLBI观测和数据处理的能力。
为了进一步提高火星探测器VLBI时延测量精度,还需要继续开展下述研究。大气和等离子体时延高精度改正方法研究;弱信号高精度VLBI处理技术研究;ΔDOR型VLBI群时延和相时延解算方法研究;同波束VLBI技术和相位参考VLBI技术研究等。深空探测中提高VLBI测量精度的最有效方法是利用大口径射电望远镜提高整个VLBI网的观测灵敏度,观测探测器更临近的射电源以去除大气、电离层等共有误差。目前已经建成了上海65 m射电望远镜,新疆110 m射电望远镜QTT也已正式立项正在建设。这些大型射电望远镜的建设和应用是提高我国深空探测器VLBI测定轨能力的有效途径。
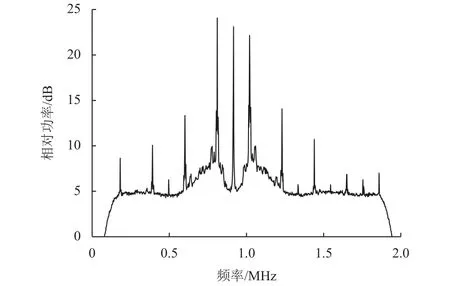
图8 天马测站接收到的MEX信号的频谱Fig.8 Spectra of MEX signals received by using Tianma telescop
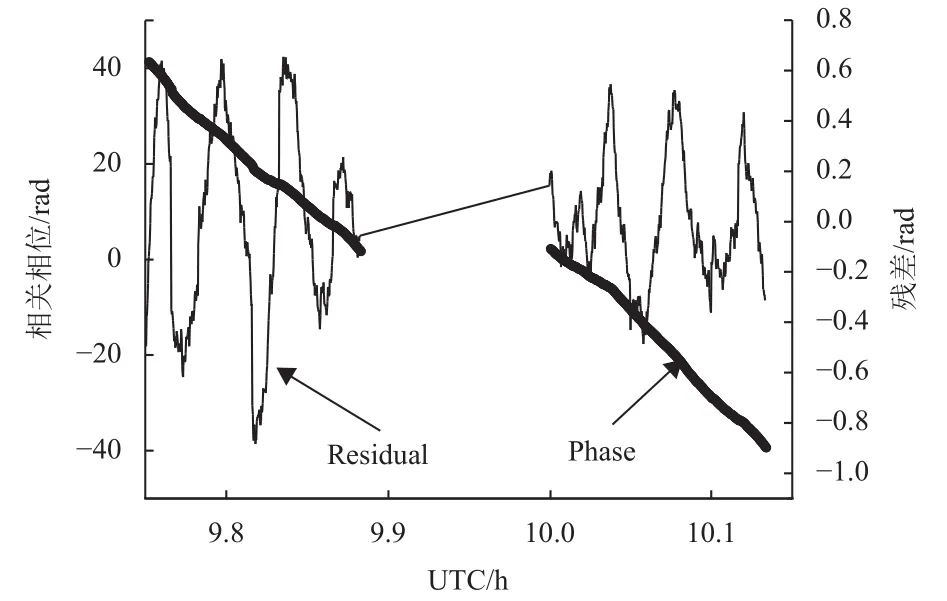
图9 KM-TM基线上的VLBI相关相位及拟合残差Fig.9 VLBI correlation phase and the fitting residual on the KM-TM baseline
猜你喜欢
军事文摘(2023年2期)2023-02-17
红领巾·探索(2022年11期)2023-01-06
成都信息工程大学学报(2021年6期)2021-02-12
小哥白尼(神奇星球)(2020年12期)2021-01-18
军事文摘(2020年18期)2020-10-27
舰船科学技术(2020年3期)2020-04-22
科学(2020年3期)2020-01-06
通信技术(2019年3期)2019-05-31
电子制作(2017年7期)2017-06-05
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
