
火星大气进入下降着陆段测控通信关键技术研究
2018-04-11 10:31:32郝万宏董光亮李海涛王宏樊敏周欢徐得珍
深空探测学报 2018年5期
郝万宏,董光亮,李海涛,王宏,樊敏,周欢,徐得珍
(北京跟踪与通信技术研究所,北京 100094)
引 言
我国首次火星探测任务计划于2020年7月在海南文昌发射场采用“长征5号”运载火箭实施发射,探测器飞行约10个月后到达火星,经过制动控制进入火星环绕轨道。之后,环绕器与着陆巡视器分离,环绕器开展为期2年(约1个火星年)的环绕探测,着陆巡视器软着陆于火星表面,在着陆区附近开展3个月的巡视探测。
在进入火星大气的进入、下降和着陆段(Entry Descent and Landing,EDL),着陆巡视器将以超音速弹道接近火星表面,在短时间内完成高速气动减速、降落伞展开等高动态机动动作。EDL是火星探测中难度最大、风险最高的飞行阶段。国外历次火星着陆任务的成败经验表明,星地通信链路是否能够可靠、准确、实时地监视着陆器飞行状态,判断气动减速和降落伞展开等关键事件信息,为后续飞行任务操作和决策提供重要判据十分重要。
本文回顾了美国和欧洲等历次火星着陆任务的基本概况,分析了这一飞行阶段的主要任务难点,总结了历次失败任务的经验教训,详细说明了测控通信在EDL飞行阶段和火星探测任务中的关键作用及其不可替代性,重点阐述了星地测控通信需要解决的关键技术,最后对我国火星探测任务提出了具体的建议和后续计划。
1 EDL段飞行过程与任务难点
1.1 典型飞行过程
EDL段是指探测器从太空以轨道环绕速度(或更高的速度)经过一系列复杂的飞行机动到达有大气层的行星(天体)表面的飞行过程。以美国火星探测器“好奇号”(Curiosity)火星车为例,探测器由火星接近段直接飞行进入火星大气,历经高速气动减速、降落伞展开等一系列机动动作,最后抵达火星表面[1]。其中,进入段是指探测器由进入火星大气开始,直至降落伞展开为止的飞行阶段;下降是指降落伞展开以后的飞行阶段,通常利用反推火箭实施减速完成动力下降;着陆是指探测器最后抵达火星表面的机动动作,通常使用多项技术手段综合完成,这些手段包括反推火箭、安全气囊或空中起重机。图1是2012年美国“好奇号”火星车EDL飞行全过程的主要事件流程。
1.2 任务主要难点
火星EDL段主要有以下3个难点[2]:
1)气动飞行减速难

图1 EDL飞行过程Fig.1 EDL flight process

图2 火星和地球大气密度特性Fig.2 Atmosphere characteristics of Mars v.s. Earth
相比于地球,火星大气十分稀薄,其密度仅约为地球大气的1/100,如图2所示。受这一关键因素影响,进入火星大气的探测器只有当高度明显下降后速度才会显著降低,若质量过大(或弹道系数β过大),则速度可能无法降到亚音速水平。作为对比,图3给出了地球和火星上典型的再入弹道对比。特别需要注意的是,只有当整个着陆器系统的弹道系数β小于50 km/m2时,该系统才具备把探测器降低到亚音速水平的能力,而且此时探测器已与火星表面十分接近(约10 km)。由于只有高度降至足够低时才能展开降落伞等减速装置,这也意味着探测器完成后续着陆机动动作的时间十分受限,甚至难以完成。
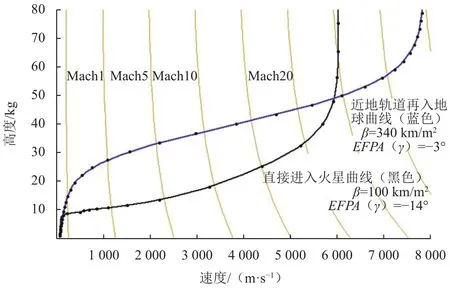
图3 火星和地球典型再入弹道高度-速度特性对比Fig.3 Altitude-velocity comparison of a typical ballistic entry,descent and landing at Earth and Mars
火星大气密度随着火星表面的气候变化而变化,此外当火星表面发生沙尘暴(沙尘暴通常随机发生)时,火星大气会受热而变得稀薄。上述这些因素进一步增加了气动飞行减速的难度和风险。
另一方面,火星表面的双模特性十分突出,星球北部的表面平均高度低,南部平均高度高,使得到达北半球具有更长的减速距离,更容易实现,因此过去数10年来大部分探测器都在火星北半球着陆,如图4所示。
2)火星表面避障难
火星表面障碍按照尺度可分为两类:一类是大尺度的地形特征,如山川、平顶山、撞击坑和火山口,以及形状并不规则的沟渠;第二类是尺度较小的岩石等。对于火星表面障碍的识别,主要是依靠轨道器的微波和光学手段获取的先验信息,以及着陆器在降落伞展开后开始激活工作的各类星载敏感器实时获取的测量信息融合完成。对于大尺度的地形特征,星载高度计和多普勒雷达很容易受到这些地形表面曲率外形影响而得到错误的测量信息,避障算法也会做出误判。例如当盘旋于大的平顶山时,着陆避障算法极有可能认为已经到达平地而直接释放漫游车。而小尺度的石块、撞击坑则可能成为漫游车抵达火星表面后的重要障碍。美国“火星勘察者”轨道器上配备了高分辨率成像科学仪器(High Resolution Imaging Science Experiment,HiRISE),具有在可见光范围对火星表面1m的分辨能力,显著降低了火星表面障碍物带来的任务风险。
3)飞行验证困难
由于整个EDL飞行过程非常短暂(约为5~8 min),而绝大部分飞行机动动作和关键判决事件处于深度紧耦合关系,几乎没有备份操作和过失补救的可能,因此对着陆器系统各飞行子系统提出了十分苛刻的可行性和可靠性要求。但地球和火星环境的巨大差异使得物理飞行验证极其困难,1:1物理验证的代价和难度都非常大。因此利用由以往实际任务获取的飞行数据或经充分验证的仿真数据作为边界条件进行飞行验证显得格外重要。美国和欧洲空间局(European Space Agency,ESA,以下简称欧空局)都将EDL飞行段的星地通信和工程遥测数据回传作为评估任务状态和结果、改进后续任务技术手段的关键技术措施。
2 国外历次任务概况与典型测控方案
2.1 历次任务概况
自1971年12月2日前苏联火星探测器“火星3号”(Mars-3)在火星表面成功实施软着陆探测以来[3],人类目前共有8颗探测器(前苏联1颗,美国7颗)成功在火星表面软着陆,如图4所示。其中前苏联的“火星3号”探测器采用了与轨道器在地火转移轨道上分离直接进入火星大气的进入方式,再入速度约为5.7 km/s。美国早期的“海盗1号”“海盗2号”探测器均采用了与轨道器构成组合体先实现捕获和环绕火星飞行,谨慎选择着陆点后再分离释放的方式实现火星软着陆[4]。在1997年的“火星旅居者号”(Voyager)[5]和2003年的“机遇号”(Opportunity)、“勇气号”(Spirit)[6]着陆器任务中,美国采用了探测器由地火转移飞行直接进入火星大气,在软着陆最后阶段采用安全气囊的缓冲方式。2008年的“凤凰号”(Phoenix)不再使用安全气囊,代之以反推火箭的软着陆方案[7]。2012年的“好奇号”任务中则使用了空中起重机的方案[1]。
除了上述成功软着陆在火星表面的探测器之外,各国都曾遭受火星着陆失败的惨痛经历。前苏联1971年发射的“火星2号”(Mars-2)着陆器由于着陆系统失效坠毁于火星表面,成为人类第一颗抵达火星的无人探测器[8]。美国于1999年发射的火星极地着陆器在进入火星大气后与地面系统失去联系,并最终宣告任务失败。由于EDL期间没有直接对地通信链路,因此无法最终判定任务失败原因。事后,美国加州理工大学喷气推进实验室(Jet Propulsion Laboratory,JPL)专门成立了事故评估委员会,对可能的事故原因进行了详查,并梳理分析出可能导致任务失败的13种失效模式,初步判定最有可能的原因是反推发动机过早关机而使探测器高速撞击火星表面。从此次任务失败后,NASA(美国国家航空航天局)要求所有火星探测器的捕获入轨段和EDL飞行段必须配备通信能力[9]。
欧洲目前尚未完全成功实现火星的软着陆探测。由英国制造的“猎犬2号”(Beagle-2)探测器随欧空局火星快车任务于2003年6月共同发射,12月抵达火星附近并与火星快车在地火巡航段分离,2003年12月25日“猎犬2号”进入火星大气。按计划,应在着陆后收到“猎犬2号”发射UHF信号的美国火星奥德赛(Odyssey)轨道器、欧空局火星快车轨道器均未收到信号。原计划实施地面信号接收的英国柴郡卓瑞尔河岸天文台(Jodrell Bank Observatory)的76.2 m口径洛弗尔望远镜也未收到“猎犬2号”的着陆信号。随后欧空局开展了大量的搜寻救援工作,但仍然找不到“猎犬2号”的踪迹。因此ESA不得不在2004年2月宣布“猎犬2号”着陆任务失败[10]。2014年11月,美国“火星勘察者”轨道器(Mars Reconnaissance Orbiter,MRO)利用高分辨率相机拍获取了“猎犬2号”的照片,正式确认“猎犬2号”在火星表面实现了软着陆。照片显示“猎犬2号”由于仅展开了4个太阳帆板中的2个,无法正常建立与地面通信的链路[11]。“猎犬2号”探测器中同样未在EDL段配备对地通信能力。2016年欧空局发射的斯基亚帕雷利(Schiaparelli)着陆器在火星EDL段飞行中由于开伞后减速不足而坠毁于火星表面。在EDL飞行过程中,斯基亚帕雷利向TGO轨道器连续回传工程遥测数据,同时欧空局还安排位于印度浦那的巨型米波射电望远镜阵列(Giant Metrewave Radio Telescope,GMRT)和火星快车轨道器同时接收和监视着陆器回传的载波信号。通过对载波多普勒动态和回传遥测信息的综合分析判断,事故调查组认为斯基亚帕雷利是由于降落伞展开瞬间动态异常增大导致星载陀螺仪饱和而带来制导控制系统出现致命错误,反推发动机提前结束工作使得减速不足而坠毁于火星表面[12]。国外历次火星任务的通信手段与任务着陆状态如表1所示。
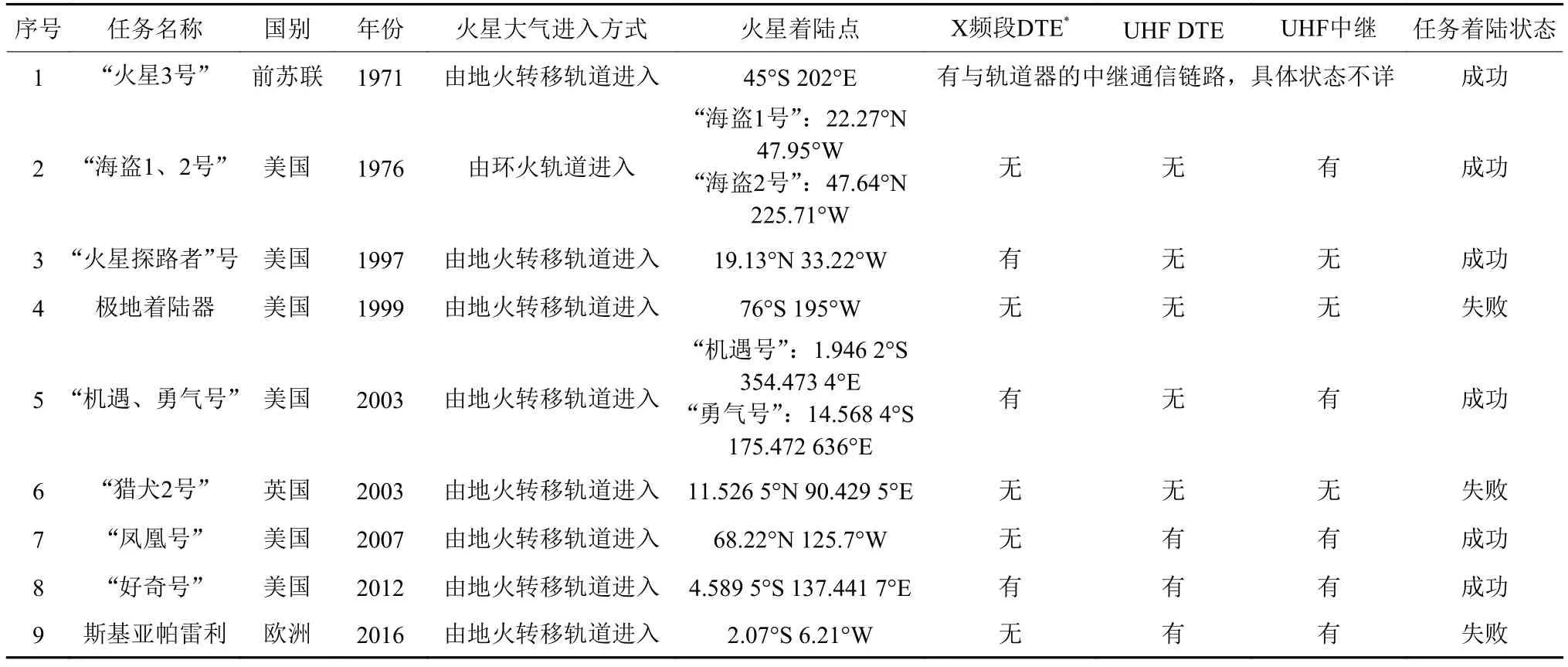
表1 历次任务通信链路与着陆状态Table 1 Communication links in the past missions and the related landing status
2.2 典型测控方案
鉴于美国“好奇号”火星车EDL段的测控方案最为完备,任务状态良好,下面重点介绍“好奇号”EDL段飞行期间的任务测控方案,如图5所示[13]。
为了实现NASA提出的EDL段可靠测控通信的刚性要求,任务团队在轨道和弹道设计、通信系统设计、轨道和姿态机动策略、指令和数据管理以及地面系统等多个方面开展了充分的分析论证和系统设计。在通信频段上,采用X频段和UHF频段互为备份的方式,其中X频段用于对地直接通信,UHF频段同时用于轨道器中继通信和对地直接通信。地面接收系统包括美国深空网位于堪培拉的70 m天线、2个34 m天线以及欧空局位于新诺舍的34 m天线。UHF频段轨道中继系统包括美国的火星勘察者轨道器MRO、奥德赛轨道器以及欧空局的火星快车轨道器。各轨道器上的接收记录设备不同,因而信号和数据的记录模式不同。在信号体制上,X频段对地通信采用了多音频移键控体制(Multiple-Frequency-Shift-Keying,MFSK),信息速率为1 bit/s;UHF中继通信采用了基于软件无线电技术的Electra接收机,调制方式和调制参数灵活可设。
在所有通信手段中,直接对地通信被JPL作为最可靠的实现方式。JPL专门开发了EDL数据分析(EDL Data Analysis,EDA)系统,与深空站内的下行遥测跟踪接收机(Downlink Telemetry and Tracking receivers,DTT)共同用于准实时的处理70 m天线、2个34 m天线组阵备份70 m的接收数据[14]。图6是EDA处理后的X频段MFSK信号接收结果。70 m天线接收信号的载噪谱密度比约为27 dB-Hz,两个34 m天线组阵合成的载噪谱密度比约为25 dB-Hz,信号强度均超过了JPL载波检测算法的门限要求。
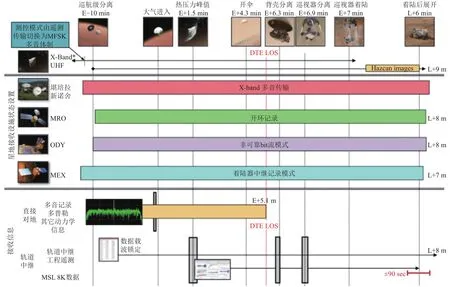
图5 “好奇号”EDL段通信方案Fig.5 Communication architecture of MSL EDL

图6 “好奇号” EDL段深空站70 m及2 × 34 m组阵接收结果Fig.6 Performances of deep space station receiving for MSL EDL(70 m single reception and 2 × 34 m arraying reception)
3 EDL段测控通信关键技术
下面从通信信道特性、信号调制体制和信号检测方法3个方面论述EDL段测控通信的关键技术。
3.1 信道特性
着陆器由地火转移轨道直接进入火星大气实施气动减速的主要好处是节省了用于火星捕获和减速的燃料,但是这一方案显著增加了星地通信的风险,其原因是高速进入大气带来的黑障问题[15]。当探测器以远大于音速的速度进入行星大气时,在探测器前进方向的正前方形成了激波层。激波层对附近的大气介质具有挤压和加热的作用,因而促使激波层附近探测器周围的大气气体电离化,形成电离离子壳套。随着电离作用的加剧,当电子浓度足够高,并且超过了信号传输频率所对应的临界等离子体密度时,由于信号电平的显著衰减,会导致黑障的出现,造成通信中断。在物理层面上,黑障出现的主要原因是在低于临界等离子体频率的频率范围内电磁波能量会被反射和吸收。当信号频率高于等离子体频率时激波层对于传输信号而言是透明的,因此可以完成星地通信。不同频段的临界等离子体密度如表2所示。

表2 临界电子密度Table 2 Critical electron densities
图7给出了不同频段信号单位传输距离上信号衰减随等离子体密度的变化曲线。可见当达到和超过临界等离子体密度后,单位传输距离上信号衰减显著增加,因而出现了黑障导致通信中断。处理这一问题的典型策略是尽可能延长对载波信号的接收并尽可能地简化各种操作。采用更高的频段用于黑障通信可减缓或消除黑障对通信带来的影响。在“好奇号”火星车EDL段飞行期间,火星车与几个轨道器间的UHF通信遭遇了长达70 s的黑障中断,而X频段对地通信并未受到显著影响。
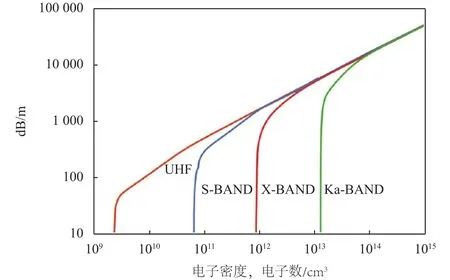
图7 单位传输距离信号电平衰减与电子密度的关系Fig.7 Attenuation per unit length versus electron density
EDL段的高动态飞行特性也对信号参数估计带来了较大困难。以美国公布的“好奇号”火星车EDL飞行段事后重建轨道为例,其单向距离变化率及其一阶导数如图8所示。根据多普勒效应,信号传输的多普勒频率及其变化率正比于探测器的速度及加速度。对于X频段,在约6 min的EDL飞行段内多普勒频率变化量约160 kHz,多普勒变化率最大可达3.5 kHz/s,开伞时的多普勒频率二阶导数高达500 Hz/s2。而对于UHF频段,由于其频率仅为X频段的约1/20,信号动态显著降低。
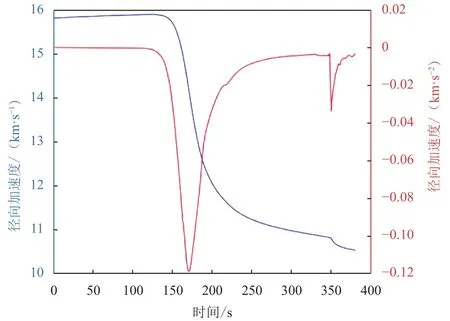
图8 “好奇号”EDL段飞行动态特性(事后重建轨道)Fig.8 Flight dynamics of MSL(reconstructed EDL trajectory)
因此,在美国多次实施的火星软着陆任务中均采用了UHF和X双频段通信的策略,以充分利用两个频段各自的优势。根据两个频段各自的优越性,以及星地系统的设施设备性能,综合设计和优化EDL飞行段的测控通信策略是首要的关键技术。
3.2 信号调制体制
信号调制体制的设计直接决定了通信系统的性能。早期任务中,EDL段通信仅以可接收和检测下行载波信号为目标,监视和判断航天器的飞行状态。随着任务复杂性以及对探测器各模块和机动动作监视需求的增强,遥测回传及速率需求进一步提高,JPL实验室分别提出了用于直接对地通信的MFSK[16],以及着眼于构建火星微波通信网络、符合CCSDS星间通信协议并用于轨道器-着陆器等器间通信的通信体制[17-19]。
在MFSK体制中,探测器持续发射下行载波,以及对载波调相的单个侧音(总共有256个侧音供选择),发射不同的侧音即对应卫星不同的分机状态或不同的飞行状态,因此可以传输工程遥测信息。其工作状态和信号检测处理过程相对简单,传输信息也十分有限。而CCSDS发布的空间链路传输协议内容十分丰富,对前向链路和反向链路的信号调制编码以及帧结构做了详细的定义和约束,可传输的内容也更为丰富,但实现复杂度更高。JPL和欧空局均开发了符合CCSDS空间链路传输协议的星载UHF收发机,并多次支持了EDL任务[20]。同时,任务设计中通常将着陆器EDL飞行阶段安排在着陆器对地球和轨道器同时可见的时段内,着陆器在EDL飞行段发出的UHF信号可由轨道器和地面天线同时接收。
对探测器EDL飞行段可靠监视和状态判断的需求,如何有效利用两种信号调制体制的工作特性,实现返回数据量的最大化,为后续任务设计、优化和飞行验证,以及火星科学研究提供宝贵的飞行数据是EDL段测控通信的关键技术之一。
3.3 地面信号检测
在所有的通信手段中,直接对地通信对星载通信系统压力最小,通信可靠性最高,灵活性最强。因此被JPL和欧空局广泛使用。地面通过开环记录探测器回传的微波信号,进行准实时的检测、分析和处理,并可利用多种处理算法进行优化和评估。以载波检测为例,对载波多普勒频率的估计即可直接判断探测器的飞行状态,并可监视降落伞展开、反推发动机工作等关键机动动作,同时载波信号的捕获和同步也是遥测回传信息解调的基本前提。因此,对载波信号的检测和参数估计一直是EDL飞行段信号检测处理的焦点。
JPL关于地面接收载波检测的基本算法是基于周期图的功率检测和频率极大似然估计[5,14,16]。其基本思想是,对高动态载波信号在频率-频率变化率的二维空间上进行最大能量检测。影响载波检测性能的主要参数包括载波接收信噪谱密度比、相干积分时间(FFT的频率分辨率),以及非相干积分时间的选择,积分时间的选取主要受限于载波信号多普勒动态的大小。图9是对于X频段载波信号和UHF频段载波信号在不同接收信噪谱密度比条件下载波错误捕获概率的理论计算结果。
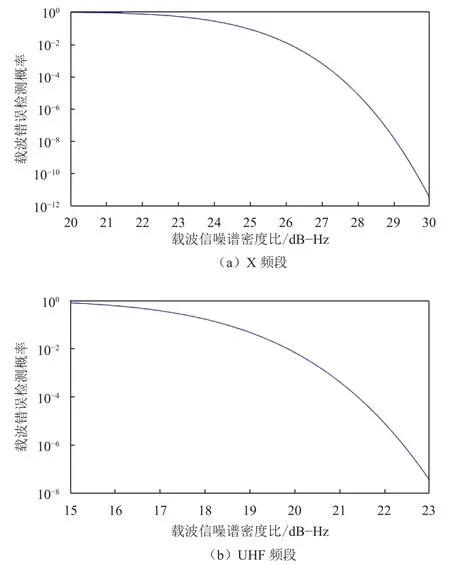
图9 X及UHF频段载波错误捕获概率理论计算曲线Fig.9 Theoretical computation on probability of carrier missed acquisition.(X-band and UHF-band)
EDL段载波检测难主要是由于信号动态大导致待估的频率、频率变化率搜索范围大引起的。JPL通过历次环绕和软着陆任务积累了丰富的火星大气数据,建立了较为准确的火星大气模型,因此可对降落伞展开以前的气动飞行段进行较为准确的动力学预测,基于这一预测模型可有效降低对多普勒频率及其变化率的搜索空间,进而降低对载波信号的检测门限[14,21]。
根据星地链路传输特性,并将着陆器的设计弹道作为先验信息,与信号检测处理进行融合,进而设计可靠有效的处理算法,是EDL段测控通信的关键技术之一。
4 结论与建议
本文基于火星EDL段的基本飞行过程和火星环境特性,分析了EDL段飞行任务的主要特点与难点,系统性地回顾了国外历次火星任务的概况,主要飞行方案特点,任务失败原因以及当前采用的典型测控通信方案要点,可以得出以下基本结论:
1)作为火星着陆探测风险最高难度最大的飞行阶段,气动减速、障碍规避和飞行验证共同构成了对成功实现火星软着陆的重大技术挑战。
2)EDL段持续时间短,导航控制、飞行操作和关键事件安排时序紧密且相互深度耦合。国外历次失败任务的原因千差万别,其经验教训也充分说明了这一飞行过程的艰巨性和复杂性。
3)直接对地通信作为监视和判断着陆器飞行状态和有效获取飞行数据最为可靠的通信技术手段,受到了NASA和欧空局的高度重视,这一宝贵经验也值得我们借鉴。
结合我国首次火星探测任务的特点和当前的飞行方案,特提出以下建议:
1)对着陆过程的各类风险失效模式进行全面的梳理和评估,确定需要作为遥测信息回传的关键状态参数,为任务飞行操作和后续任务的优化设计、飞行验证提供宝贵数据。
2)将对地通信作为监视和判断着陆器飞行状态的重要技术手段。初步考虑着陆器EDL飞行期间采用着陆器发射信号,轨道器和地面大天线同时接收互为备份的EDL状态监视方案。位于我国贵州省黔南的FAST射电望远镜,是世界最大单口径、最灵敏的射电望远镜,具备接收火星探测器下行UHF频段信号的能力;同时我国目前已建成佳木斯66 m深空站、上海65 m射电望远镜,同时正在建设喀什4 × 35 m天线阵系统,其它大口径天线也在论证立项之中,具备联合接收X频段下行信号的能力。深入开展基于X频段、UHF频段信号对地通信可行性的分析论证,提出基于FAST接收UHF频段信号,佳木斯深空站、喀什天线阵系统和国内天文VLBI系统联合接收X频段信号的具体技术方案,并对检测处理算法开展深入研究分析。
3)美国于2018年5月发射“洞察号”(InSight),将于11月下旬到达并在火星软着陆。该探测器与“凤凰号”平台相似,通过UHF链路与地面通信。在几何可见的前提下,建议基于FAST接收洞察号EDL飞行期间的下行信号,积累试验数据并验证这一方案的可行性,为进一步关键技术攻关奠定基础。
猜你喜欢
航天器工程(2019年4期)2019-11-11 03:41:00
伙伴(2019年12期)2019-01-17 04:38:56
电子测试(2018年22期)2018-12-19 05:12:58
北京航空航天大学学报(2017年4期)2017-11-23 05:48:48
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
西部广播电视(2015年10期)2016-01-18 04:01:45
中学科技(2015年7期)2015-07-03 05:44:32
电子设计工程(2015年3期)2015-02-27 12:03:58
电测与仪表(2014年15期)2014-04-04 12:05:32
