电磁导航式智能工业机器人控制系统研究
2018-04-10 03:11:15方立友
电力与能源 2018年1期
方立友
(无锡南洋学院智信学院,江苏 无锡 214081)
机器人是模仿人类特征做出的智能产品,电磁导航式机器人作为机器人的一种,具有三个特点。感知能力,电磁导航式机器人能通过系统感知到外界信息。独立思考能力,电磁导航式机器人和人一样拥有思考问题的能力,这个思考过程可以概括为加工问题、处理问题和决策问题。行为能力,机器人需要执行系统下发的命令,对信息进行输出,从而形成行为。合理有效的智能控制系统能够控制电磁导航式智能机器人的工作过程,保证工作质量[1]。
本文主要对电磁导航式智能工业机器人的控制系统进行研究,分别对系统的硬件和软件两部分进行设计,然后利用试验验证了本文设计的系统相较于传统系统有突出优势。通过本文的研究可以发现所设计的系统能够有效地对电磁导航式智能工业机器人进行控制,而且工作成本低、工作质量高、耗费时间短,是未来控制电磁导航智能机器人必然使用的系统之一[2]。
1 电磁导航式智能工业机器人控制系统硬件设计
本文设计的电磁导航式智能工业机器人系统硬件部分由视觉传感器、光电编码器和嵌入式处理器3部分组成,系统硬件工作如下:视觉传感器负责感知外部信号,将感知到的信号传给光电编码器,由编码器编码数据,最后由嵌入式ARM处理器处理整个信息。电磁导航式智能工业机器人系统硬件部分设计总体框图如图1所示。

图1 硬件部分设计总体框图
在硬件系统上安置视觉传感器能够使其获取感知外部信息的能力[3]。视觉传感器主要利用彩色CCD和三维激光雷达采集外界信息,如果不能准确地采集到视觉信息,将会对机器人的行驶速度、行驶路线以及躲避障碍物产生直接的影响,同时也决定着系统的实时性和鲁棒性。处理视觉信息也是视觉传感器的工作之一,处理内容包括压缩和滤波视觉信息,监测障碍物,控制系统,识别感知三维信息。视觉感知器能够利用二维图像认知三维环境信息,帮助机器分析所在的三维环境中物体的几何信息。视觉传感器能够帮助机器人自定位、导航以及设置环境地图,通过CCD采集信号,然后利用传感系统将采集到的信号转变成PAL制式的模拟信号,最后将PAL模拟信号转变成YUV422数字信,利用USB2.0接口传入PC内存中。数据传感器的视频信号为PAL信号,获得的像素为750(H)×420(V),水平解像度为720TV lines,镜头为32倍光学变焦,68倍数字变焦,水平视场角为10°~70°,分为自动、手动、AE三种曝光方式,产生的噪声小于50 dB,要求电源电压为4~12 V。视觉传感器拥有接收黑色彩色两种图像的能力分辨率高达700 X 352,可以无级缩放,且亮度、对比度、饱和度都可调[4]。
嵌入式ARM处理器是由英国剑桥ARM公司研发,目前已经遍布工业领域、电子领域、通信领域。ARM处理器的处理精度能够达到32位,对价格和功耗要求较高的消费类产品应用较多。根据ICE-RT逻辑进行调试开发,耗功率极低,对于功耗要求较高的应用来说较为合适,系统内部为五级流水线结构,指令集为代码密度高并兼容16位的Thumb,支持各个类型的操作系统,最高的主频为130MIPS,对于指令有极高的执行效率,支持数据Cache和指令Cache,具有其他处理器难以比拟的处理数据能力。ARM处理器在工作时要保证持续输入50 A以上的稳定电流和220 V的稳定电压,从而确保每小时的运行频率能够60 MHz,ARM处理器还具备另外一个优点,即工作延时极短,仅仅5 μs,完全可以忽略不计,并且运行速度极快。数据输入追踪器的格式为:数据1+追踪+数据2+检测;输出格式为:追踪结果+追踪效率[5]。追踪器利用连接的VERO结构完成数据的追踪,追踪周期在2~5 h之间,同时内部设有EVM追踪扩展系统,增加了追踪器的追踪范围,确保了追踪过程的安全性。
2 电磁导航式智能工业机器人控制系统软件设计
利用运放原理实现电磁导航式智能工业机器人系统软件部分的设计,计算过程如下:
(1)
(2)
式中I——工作电流;U——工作电压;out1和out2——两个输出端。
(3)
式(3)能够测定出输出电压。在测定出输出电压和输入电压后,要实现系统的控制,控制算法如下所示[6]:
(4)

3 试验研究
为了测试本文设计的电磁导航式智能工业机器人系统是否具有实际可操作性,与传统的电磁导航式智能工业机器人系统进行对比,设计的试验参数如下:输入电压值为Uout为220 V,额定电压值-UREF为100 V,输出端1Iout1输出的电流为20 A~50 A,输出端2Iout2输出的电流为10~100 A,在组态下进行流程设定,工作时间为5 h。试验参数设定如表1所示[7]。
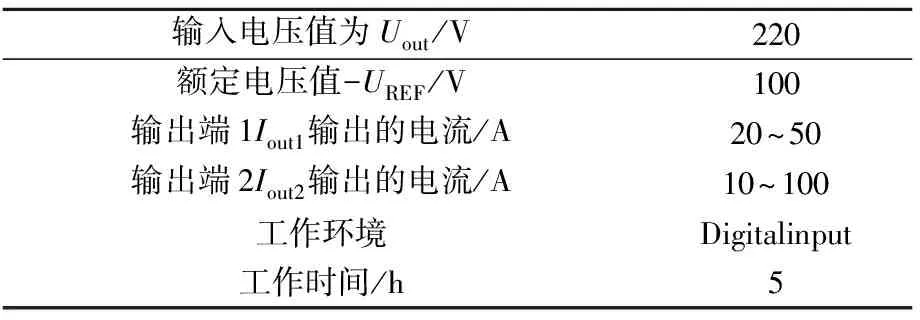
表1 试验参数设定
通过设定的参数和环境进行试验,得出的结果如图2所示。

图2 传统系统实验结果图
由图2可知,传统系统通过输出端1和输出端2能够实现对机器人的控制,但控制过程极为不稳定,并且受控端数和控制端数无法呈现比例关系,控制过程耗费时间过长,并且消耗大量的成本,得到的工作效率过低,传统系统无法实现有效控制[8]。设计系统试验结果图如图3所示。
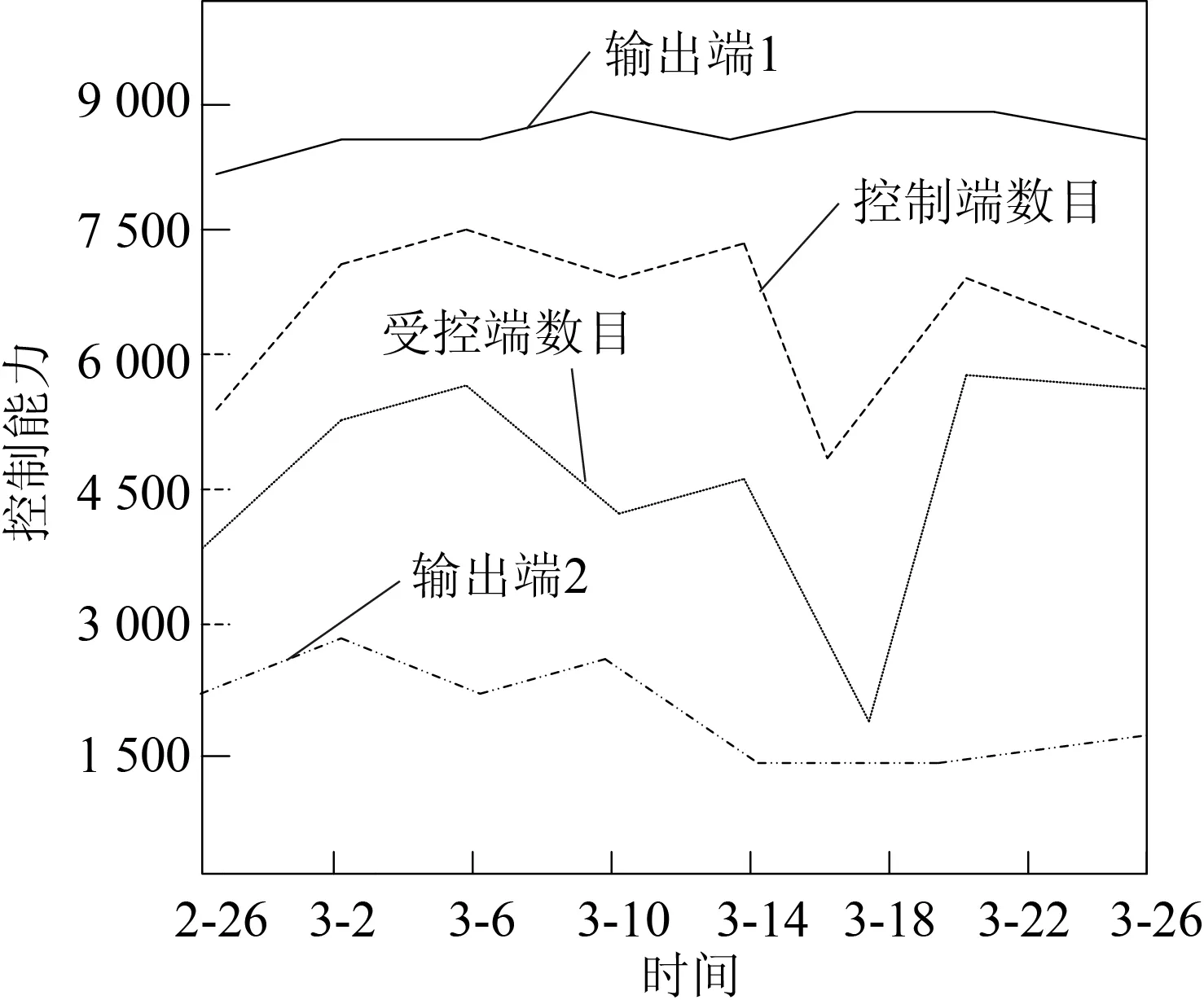
图3 设计系统实验结果图
由图3可知,设计的电磁导航式智能工业机器人系统能够有效利用输出端1和输出端2对机器人进行控制,控制过程稳定,不会受到外力冲击,受控端数和控制端数呈现比例关系,可见本文设计的系统耗时更短、成本更低、工作质量更好。
参考文献:
[1]吴祥, 王冠凌. 基于电磁导航智能车的控制研究及实现[J]. 四川理工学院学报(自然科学版), 2015, 28(6):42-46.
WU Xiang, WANG Guanling. Control research and realization of the intelligent vehicle based on the electromagnetic navigation[J].Journal of Sichuan University of Science & Engineering(Natural Sicence Edition), 2015, 28(6): 42-46.
[2]刘源, 张文斌, 刘雪扬,等. 电磁导航智能车检测和控制系统的研究[J].传感器与微系统, 2012, 31(4):63-66.
LIU Yuan, ZHANG Wenbin, LIU Xueyang, et al. Study on electromagnetic navigation intelligent vehicle detection and control system[J].Transducer and Microsystem Technologies, 2012, 31(4): 63-66.
[3]刘源, 张文斌, 刘雪扬,等. 电磁导航智能车检测和控制系统的研究[J].传感器与微系统, 2012, 31(4):63-66.
LIU Yuan, ZHANG Wenbin, LIU Xueyang, et al. Study on electromagnetic navigation intelligent vehicle detection and control system[J].Transducer and Microsystem Technologies, 2012, 31(4): 63-66.
[4]尤晓玲, 王能才. 基于二次型性能指标学习算法的智能车舵机控制系统研究[J].自动化与仪器仪表, 2015(11):178-179,182.
[5]蔡卫国, 马莉莎, 李莉. 电磁诱导式喷雾机器人导航控制设计[J].机械设计与制造, 2007(4):136-138.
CAI Weiguo, MA Lisha, LI Li. Design on navigation control of spraying robot based on electromagnetic navigation[J].Machinery Design & Manufacture, 2007(4): 136-138.
[6]许伟, 沈捷, 顾雪梅,等. 电磁导航式智能车传感器模块的设计与实现[J].科技信息, 2011(12):25-26.
[7]伍洲, 方彦军, 赵芃. 高压巡线机器人电磁导航系统设计与实现[J].华东电力, 2008, 36(3):22-25.
WU Zhou, FANG Yanjun, ZHAO Peng. Design and realization of electromagnetic navigation systems for power transmission line inspection robots[J].East China Electric Power, 2008, 36(3): 22-25.
[8]郑怡, 王能才. 改进的单神经元自适应PID控制算法在智能车速度控制系统中的研究与应用[J].自动化与仪器仪表, 2015(3):98-99.
ZHENG Yi, WANG Nengcai. Single neuron adaptive pid control algorithm is improved in the intelligent vehicle speed control system research and application in the[J].Automation & Instrumentation, 2015(3): 98-99.
猜你喜欢
中国生物医学工程学报(2019年4期)2019-07-16 08:04:16
黄河之声(2018年5期)2018-05-17 11:30:01
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:46
Coco薇(2015年10期)2015-10-19 12:51:50
电子设计工程(2015年12期)2015-02-27 12:06:20
汽车零部件(2014年1期)2014-09-21 11:41:11
小青蛙报(2014年1期)2014-03-21 21:29:39
机械制造文摘(焊接分册)(2014年6期)2014-03-20 13:57:48
河南科技(2014年16期)2014-02-27 14:13:21
河南科技(2014年8期)2014-02-27 14:07:41