一种小型智能割草机器人的设计与实现
2018-04-08 02:05:15丁学明
电子科技 2018年4期
高 飞,丁学明,李 键
(上海理工大学 光电信息与计算机工程学院, 上海 200093)
随着人们健康理念的形成,园林绿化建设的地位日益提高。如何高效推进绿化养护成为一个重要研究课题[1]。传统割草机污染高、能耗高、噪音大、需要额外的人力、物力、财力且具有一定安全隐患[1]。而割草机器人无需人工干预,可自动工作和回充,具有低噪音、能耗少且环保的优点,因此割草机器人的应用越来越广泛,受到国内外研究人员的普遍关注[2]。
智能割草机器人代替传统割草机,需保证机器人在特定区域内进行高效率自动工作。目前,对于识别特定区域和路径规划已推出多种方案。例如,文献[3~6]中均采用图像处理的方式来识别边界线和区域内的各种物体信息,但户外光线变化严重,且环境较复杂,需大量数据确保其准确性。文献[7~8]中通过GPS定位系统定位机器人的位置,可识别特定区域并做出较好的路径规划,但精度不准确,且价格高昂,不适合家用式小型割草机器人。
本文运用电子围栏线圈定特定区域,通过电磁感应原理识别边界线,根据传感器检测数据分析识别机器人周边的环境特征,综合分析来控制机器人执行相应的动作完成草地修整养护工作。设计了自主回充实现预约模式的多次工作,解决了割草机器人无法在斜坡上直线行进的问题,并设计实现了一种自主寻草算法,提高了机器人的割草效率。
1 系统整体结构
智能割草机器人主要由控制系统、动力系统、传感系统、通信系统和人机交互系统五部分组成,系统结构框图如图1所示。
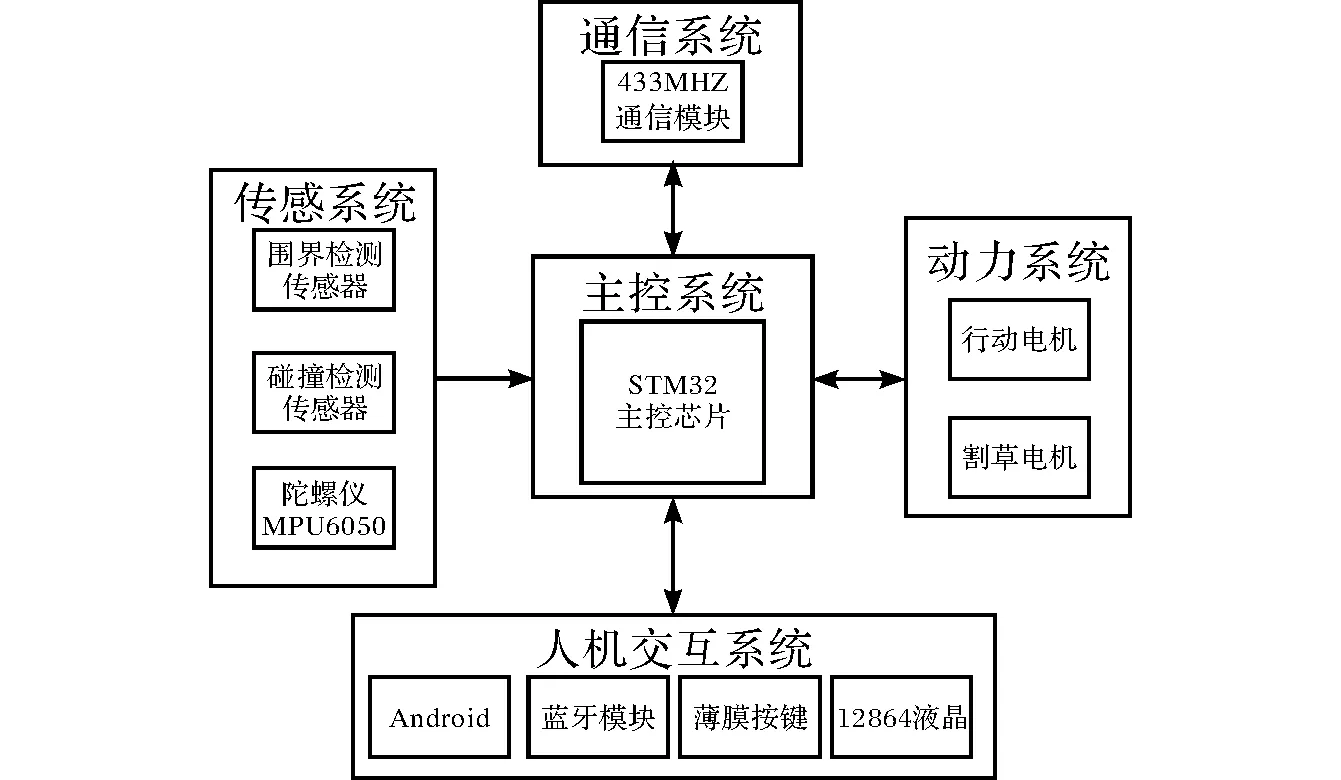
图1 智能割草机器人系统结构框图
1.1 控制系统
主控芯片采用意法半导体公司的32位ARM的Coterx-M3内核的STM32F103ZET6芯片,由文献[9]可知,该芯片最高主频为72 MHz,具有512 kB ROM和64 kB RAM空间,具有3个12位的ADC转换器,包含21个通道,高达11个定时器,并具有2个I2C接口,5个USART接口,3个SPI接口,资源充足。
1.2 动力系统
行动电机和割草电机均使用无刷直流电机,文献[10~14]中说明其优点在于:(1)采用电子换相器代替电刷,寿命将远远高于有刷直流电机;(2)调速性能好,可以替代有刷直流电机;(3)无刷直流电机避免使用电刷,噪音明显小于有刷电机;(4)效率高,割草机器人使用续航更持久;(5)更加可靠稳定。
1.3 数据采集系统
采用电子围栏线圈定工作区域作为边界,通过电磁感应原理检测机器人与边界线的距离来识别边界[2]。这是目前智能割草机最常见的识别边界方案。围界检测传感器采用自制感应线圈结合检测电路获取边界线中导线交变电流产生的磁场信号,具体电路如图2所示。电感线圈通过感应边界线中交变电流产生的磁场得到感应电动势,并经过图2中的反向放大器得到正确相序的信号,然后主控板对信号进行滤波和放大,将其转化为稳定的电压信号,通过A/D采样得到感应电动势的大小,从而判断机器人与边界线的距离大小。
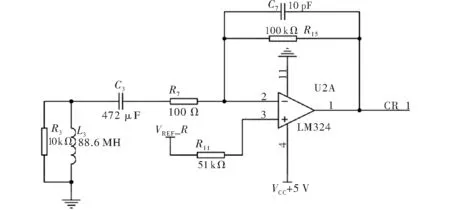
图2 围界检测电路
MPU6050陀螺仪6轴加速度传感器模块测量3轴加速度和3轴角速度,利用四元素法计算机器的偏航角、俯仰角和翻滚角,通过三角变换得到机器人的倾斜角度以及地形坡度等信息。
此外,由国际现行割草机器人安全标准 (IEC 60335-2-107-2012)[15]知,障碍物传感器和提升传感器是割草机器人必备的检测元件,本文采用霍尔传感器的工作原理,获取机器人的碰撞状态信息和提升状态信息,传输给主控系统进行分析处理。
1.4 通信系统
割草机器人与充电站采用433 MHz无线传输模块进行通信。该定制模块通信距离在空旷地带可达到1 km,采用USART通信协议进行数据交互。具体通信协议如表1和表2所示。

表1 机器人发送数据
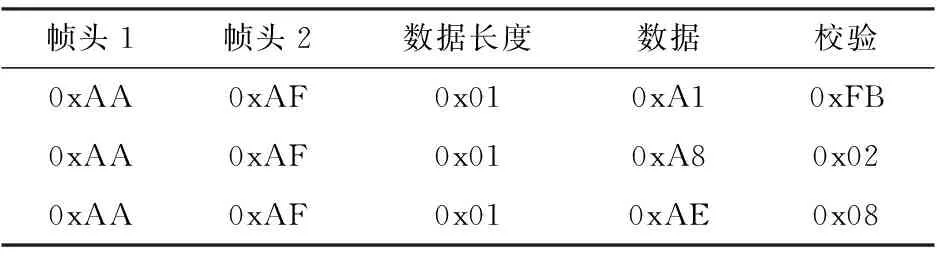
表2 充电站发送数据
如表1和表2所示,机器人启动时,传输第一组数据帧到充电站,充电站收到正确的数据帧后,将返回第一组数据帧给割草机器人,割草机器人收到准确数据帧后开始工作。若充电站出现边界线断开或充电站断电,则传输对应的第2、3组数据帧到割草机器人,割草机器人接收到数据帧后立刻刹车停机,避免机器离开边界线出现安全事故。
1.5 人机交互系统
人机交互系统包括两种方式,一种是通过矩阵按键输入指令,并显示到12864液晶显示屏;一种是手机APP通过蓝牙模块发送指令到割草机器人,并在APP上显示已设置的相关状态。
2 边界检测及环境识别
2.1 边界检测
奥斯特实验表明在通电长直导线周围会形成一个圆形的磁场。垂直于导线的平面上,安装一对垂直和水平方向的线圈,即可感应到通电导线周围电磁场垂直和水平方向的分量。机器平台平面会高于地面距离固定值R,故磁场分量图如图3所示。
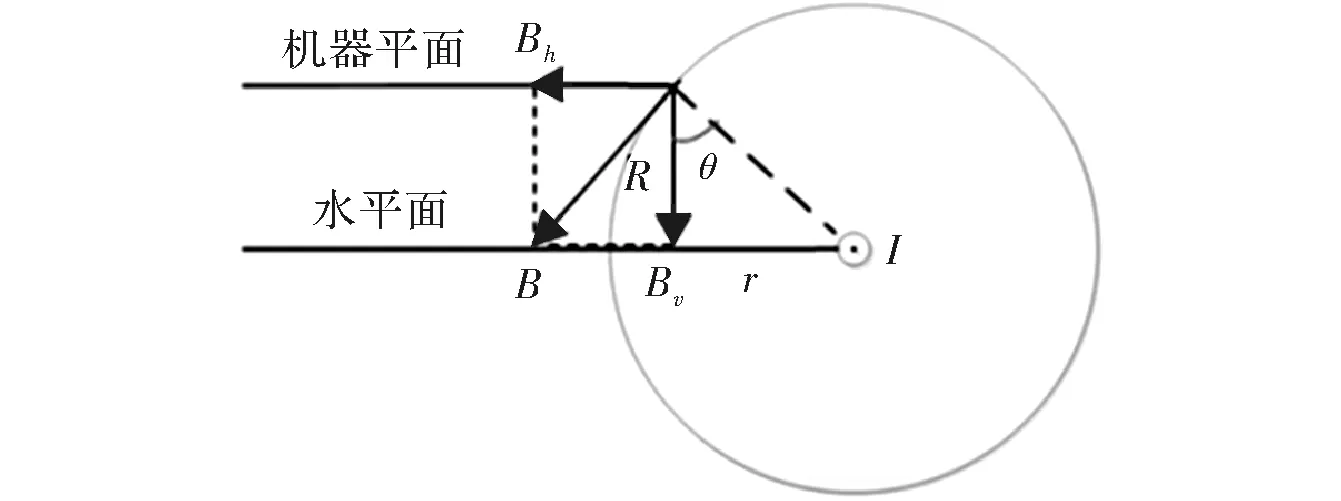
图3 磁场分量
(1)
产生的电磁场水平方向和垂直方向的分量的大小分别为
(2)
(3)
由式(2)和式(3)可知,水平方向分量随着机器人与导线距离r的增大而变小,垂直方向分量和机器人与导线的距离r的关系相对复杂,随距离r从0变为无穷大,垂直分量呈现出先增大后减小的趋势。因此采用机器人平面内垂直和水平两个线圈检测磁场,具体电感线圈摆放位置如图4所示,A1、A2、A3和A4为与水平面平行的机器人平台所处平面上放置的4个线圈。
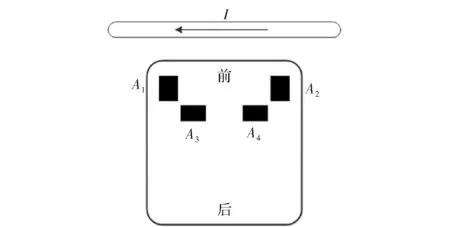
图4 围界检测传感器摆放位置
导线中通过交变电流时,导线周围的磁场将发生变化,从而在线圈中产生感应电动势。由法拉第电磁感应定律知,电路中感应电动势大小与穿过这一电路的磁通量的变化率成正比。具体关系为
(4)
式(4)中,N为线圈匝数;S为磁通量横截面积。由式(4)可知,感应电动势与导线中的电流变化率和距离有关系,通电电流已知,通过检测感应电动势的大小即可计算割草机器人与边界线的距离关系。
2.2 环境感知与识别
环境感知与识别是机器人行动的关键,机器人工作中将遇到多种复杂区域,例如直角区域、锐角区域、1 m宽长通道区域和1 m宽伪长通道区域等。机器人工作中将从不同的角度与边界线相遇,当电感线圈与边界线形成一定的角度θ,感应电动势将会与垂直于边界线情况下的感应电动势形成三角变换关系,通过反三角计算即可得出角度θ。
(1)直角区域的感应电动势大小如图5所示。
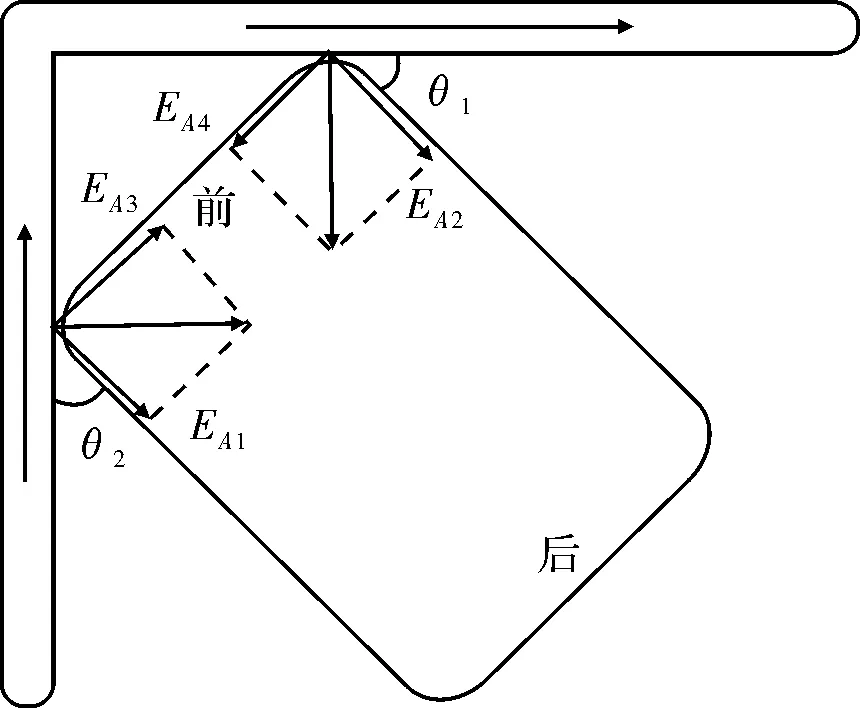
图5 直角区域的感应电动势
图5中,EA1、EA2、EA2和EA4分别代表线圈A1、A2、A3和A4检测到感应电动势大小和方向,通过反三角变换可知
(5)
(6)
通过θ1和θ2可得出此区域为直角区域或锐角区域,机器人执行相应的动作迅速离开此区域,避免长时间工作在此区域,降低工作效率以及损伤草皮。
(2)在1 m宽长通道区域和伪长通道区域,若机器人右侧线圈检测到边界线,则左侧的感应电动势会偏小,机器人会判断为长直导线,继续向前工作。判断多次遇到边界的相遇角度、间隔时间和总时间等特征,可区分长直导线区域、1 m宽伪长通道区域和1 m宽长通道区域。若为1 m宽长通道区域,则直接通过通道区域,完成多块区域的工作任务;若为1 m宽伪通道区域,机器遇到边界线的状态和时间上与长通道区域的数据会明显不同,以此来区分两者,从而执行不同的行为动作,保证机器迅速切换置其他区域继续工作。
3 关键算法与技术
3.1 自主巡线回充
传统的割草机电量不足时,需用户自行更换蓄电池,损耗工作时间,且增加人工操作时间。本文设计自主巡线回充方案,通过跟踪边界线回到充电站进行充电,充电完毕再次进入区域割草,以此实现预约模式工作,减少人工操作,并提高了机器人割草效率。而电感线圈测量边界线信号的强弱与相隔距离以及高度的关系如图7所示。
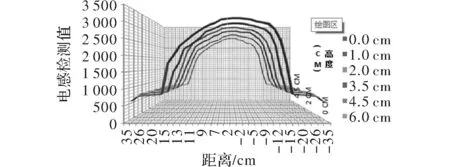
图7 围界传感器检测信号值与距离和高度的关系
图7中,随着距离的增加,围界信号传感器检测值逐渐减弱,距离较近和较远的时候,几乎无变化。随着高度的增加,信号逐级递减。因此在位置式PID控制下,机器人会在围界线上频繁摆动,在直角弯道等复杂区域,则会出现大幅度的机身摆动。而在摆动超过±4CM的情况下,则会造成机器人无法准确对接上充电站,从而充电失败的情况。故提出积分分离式PID算法控制割草机器人跟踪边界线信号,减小割草机器人机身的摆动。积分分离式PID控制算法为

(7)
式(7)中,积分项的开关系数β为
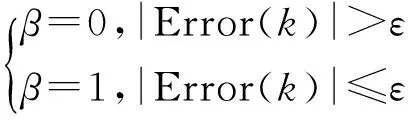
(8)
实际测试巡线中,机器人巡线通过直角弯道和加入人为干扰工作曲线图如图8所示,11 s时进入直角弯道,28 s时加入人为干扰。
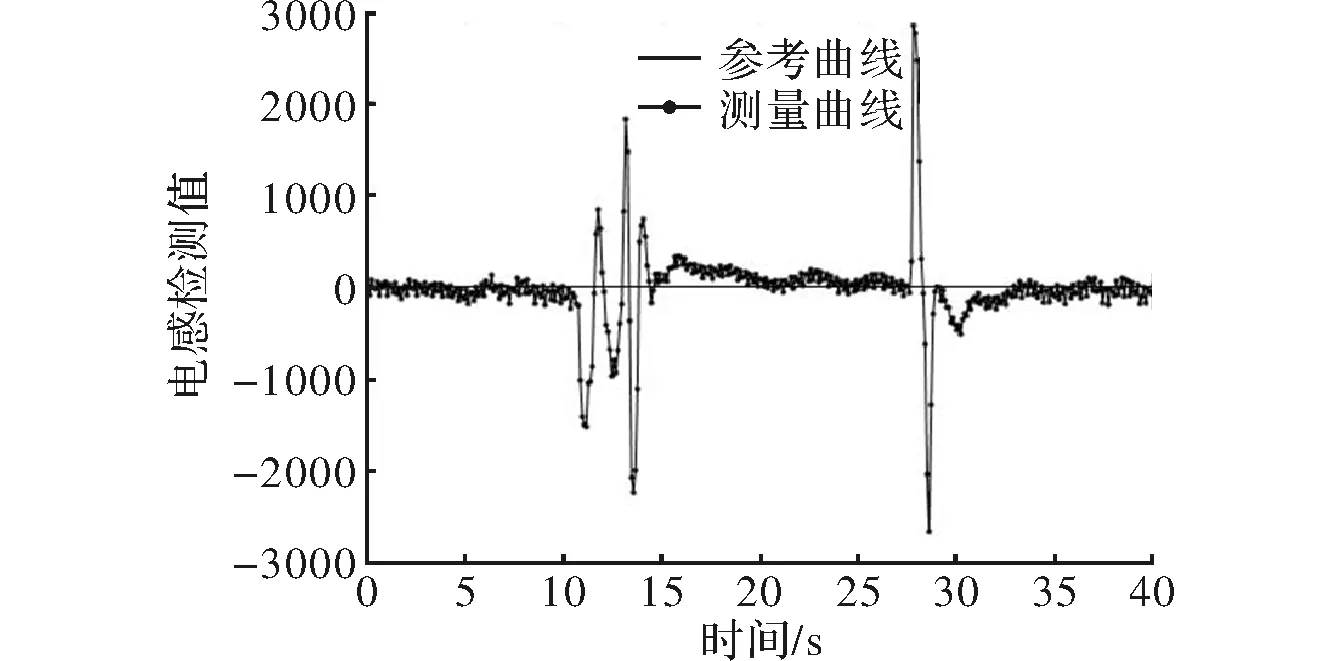
图8 巡线回充曲线
图8中,11 s时机器进入直角弯道,经过4 s的调节时间,机器人稳定下来,巡线偏差数据在计数±200内波动,根据图7所示,在高度1 cm、距离0 cm条件下,机器人检测的偏差数据在距围界中心线±2 cm内的波动值为±100。巡线过程以两组围界检测传感器检测值的和作为输入偏差,故采集巡线偏差数据会加倍,因此推断机器人稳定时距离围界中心线的波动在±2 cm内,而实际测试效果显示割草机器人的摆动幅度在±2 cm内,机器人几乎无摆动。28 s时,人为添加干扰力,使机器人头部偏离边界线约15 cm,如图8所示,机器人迅速进行调节,并在3 s内稳定下来,达到稳定巡线的目的,保证割草机器人准确无误的进入充电站对接上充电片,进入充电状态。充电完毕之后,若未工作完毕,则机器人再次进入工作区域内进行割草工作。多次往复,实现割草机器人的预约模式,减少了人工操作的次数。
3.2 坡度补偿
本文设计的割草机器人为四轮机器人,包括两个行动大轮和两个万向轮。由于万向轮无法固定其行进方向,而机器人的重力分量作用导致机器人在上坡过程无法直线行进,反而呈现曲线运动的轨迹,从而无法越过20°的斜坡,最终无法对20°坡度的斜坡上的草地进行整修养护。因此,提出一种坡度补偿的算法,使机器人在上坡过程保持直线行进,从而完成斜坡上的割草工作。
为了测试坡度补偿算法的有效性,搭建了坡度为20°的斜坡平台,坡的高度为90 cm,斜坡平台分为坡下水平面、坡中、坡上水平面,其中坡上水平面比坡下水平面高90 cm。在斜坡平面上测试曲线图如图9所示。

图9 坡度未补偿和补偿后的偏航角曲线图
坡度补偿算法基本思想:机器人工作到坡度6°以下则无需进行坡度补偿,基本无曲线偏移;工作在坡度为6°以上的地形时,开始坡度补偿,记录此时偏航角,采用位置式PID算法控制机器人跟踪当前偏航角,保证机器人始终沿当前偏航角前行,以此控制机器人在20°以下坡度地形上直线前进,从而越过坡度地形,达到坡度补偿的效果。
图9(a)在未加入坡度补偿算法情况下,机器人前5 s处于坡下水平面,5~13 s处于20°坡中,13~15 s处于坡上水平面。5~7 s作为滤波环节,确认机器人处于高于6°的坡上,实际上机器人已经进入坡中,故测量偏航角呈现一定的上升趋势。7 s时,检测机器在坡中,此时机器人由于重力原因,开始呈曲线形式下滑,测量偏航角从-20°直线下降到近-80°,在下滑到坡下水平面时,解除坡度补偿状态,参考偏航角归零。可以看出,机器在未加入坡度补偿算法时,完全无法越过20°的坡度地形。
在同样条件下,图9(b)加入坡度补偿算法后,机器前4.5 s处于坡下水平面,4.5~13 s处于20°坡中,13~15 s处于坡上水平面。从图中可以看出,在5.8 s确认机器进入坡中后,机器人在2 s内迅速调节机器偏航角达到参考偏航角,在坡中偏航角最大误差约为2°,稳定后误差在1°以内,基本无误差。由于坡度平面与坡上水平面相接处未做机械缓冲处理,在13 s机器解除坡度补偿状态后,机器人机身会存在一定抖动,故测量偏航角数据存在一定的波动,在进入坡上水平面后,数据迅速稳定下来。由此验证了坡度补偿算法的有效性。
3.3 自主寻草
割草机器人工作中常采用遇边界线后随机转弯行走的方式进行草皮整修工作,机器人行走路线杂乱无章,导致工作效率不高。本文根据割草电机遇草后,阻力变大,割草电流变大的原理,提出一种自主寻草的算法来提高割草效率。自主寻草算法流程图如图10所示。
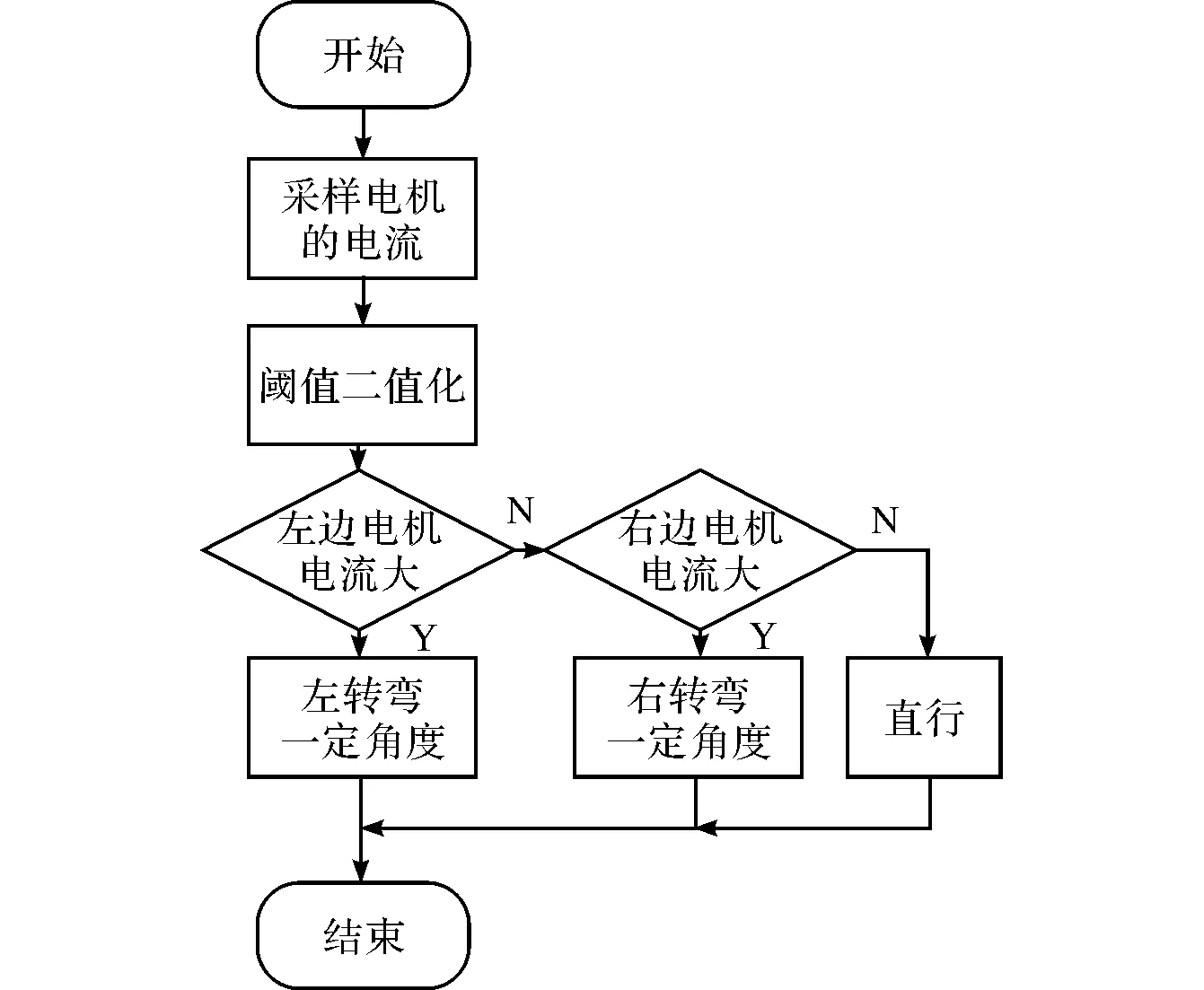
图10 自主寻草算法流程图
算法主要思想:机器人定时采样3个割草电机的电流值,将其分别进行阈值二值化,从而控制机器人的转弯方向,若只有左侧割草电机电流超过阈值,则左转弯;若只有右侧割草电机电流超过阈值,则右转弯;若左右割草电机电流均超过阈值,则直行,不进行转向动作。根据3个电机校准过后的电流大小,调整其转弯的角度大小,电流偏差越大,转弯角度越大;电流偏差越小,转弯角度越小,以此实现机器人自主寻草。实际草地测试效果显著,明显提升了机器人的割草工作效率。
4 结束语
本文设计的智能割草机器人以国际现行割草机器人安全规格检测标准制作。针对调试机器人中遇到的问题,提出了自主巡线回充算法、斜坡补偿算法和自主寻草算法。实现了无人工干预的预约工作模式,解决了机器人在20°斜坡上无法直行割草的问题,设计实现了一种自主寻草算法,提升了割草机器人的效率。经过大量实地测试,割草机器人能准确识别各种复杂地形,并能稳定可靠完成预约和自主回充模式的工作,在20°角度以下的坡度上均能直行割草工作。同时具备各种安全报警机制确保人身安全,系统具有功能多、成本低、效率高和安全等级高等优点。
[1]孙燮.机器人自动割草机的研究[J]. 农机化研究, 2012, 34(10):92-95.
[2]杨金龙,赵旭,邬杨波,等.基于电磁感应的割草机器人边界技术研究[J].机电工程,2015,32 (11): 1443-1447.
[3]Chang C K, Siagian C, Itti L. Mobile robot monocular vision navigation based on road region and boundary estimation[C].Guangzhou:IEEE/RSJ International Conference on Intelligent Robots and Systems,IEEE,2012.
[4]谢忠华.基于视觉导航的割草机器人运动控制[J].农业工程,2016,6(5):30-32.
[5]杜慧江.全自动割草机器人的智能控制技术研究[D].杭州:浙江理工大学,2015.
[6]童逸舟.基于图像处理的智能割草机器人路径规划研究[D].杭州:浙江理工大学,2016.
[7]贺涛,肖勇.割草机器人工作原理及试验研究—基于GPS/DR组合导航系统[J].农机化研究, 2017,39(8):191-194.
[8]赵建伟,王洪燕,唐兵,等.基于移动机器人的GPS轨迹生成及定位研究[J].工矿自动化,2016, 42(1):17-19.
[9]ST Microelectronics Corporation. DS5792: High-density performance line ARM-based 32-bit MCU with 256 to 512kB Flash, USB, CAN, 11timers, 3 ADCs,13 communication interfaces[M]. Geneva:ST Microelectronics Corporation,2015.
[10] 姜卫东,胡杨,黄辉,等.采用坐标变换的无刷直流电机换相过程分析及减小换相转矩脉动的方法[J].中国电机工程学报, 2015, 35(24): 6527- 6534.
[11] 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报, 2012, 27(3): 25-34.
[12] 王峰,杨文焕,杨凯辰,等.无刷直流电机变频调速控制系统仿真研究[J].电子科技,2015,28(6): 100-103.
[13] 王大方,卜德明,朱成,等.一种减小无刷直流电机换相转矩脉动的调制方法[J].电工技术学报, 2014, 29(5):160-166.
[14] 杨振宇.永磁BLDCM双闭环控制系统技术研究[J].电子科技,2017,30(4): 170-173.
[15] International Electrotechnical Commission (IEC). Household and similar electrical appliances - Safety - Part 2-107: Particular requirements for robotic lawnmowers,IEC 60335-2-107[S].Geneva:International Electrotechnical Commission (IEC),2012.
猜你喜欢
第二课堂(课外活动版)(2022年5期)2022-05-25 03:21:56
中国电业与能源(2021年4期)2021-05-22 00:39:42
广西电业(2020年11期)2020-03-23 07:14:14
学生天地·小学中高年级(2018年5期)2018-09-07 10:41:20
学生天地(2018年14期)2018-09-07 02:44:36
无人机(2018年1期)2018-07-05 09:51:06
智慧少年(2017年8期)2018-01-10 21:39:12
中学数学杂志(高中版)(2016年6期)2017-03-01 18:51:01
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
电测与仪表(2015年3期)2015-04-09 11:37:48