舰船目标一维距离像特性分析
2018-04-08 02:05:14陈宏昆卢建斌
电子科技 2018年4期
陈宏昆,卢建斌
(海军工程大学 电子工程学院, 湖北 武汉 430033)
高分辨雷达发射宽带信号时,雷达的距离分辨单元远远小于目标尺寸,目标占据多个距离单元,每个距离单元内的回波信号是该单元内所有散射中心反射回波的矢量和,这样就可以得到目标反射场强度在雷达径向上的投影图,这就是一维距离像[1-5]。一维距离像能够提供目标的散射中心数目、分布及径向长度等特征,且具有获取简单、实时性高等优点[3,6-9],所以,一维距离像目标识别可以在海上舰船目标识别中发挥重要作用。
但在实际应用中,舰船目标姿态角和海面起伏[10]的不确定,雷达信号的带宽、载频等参数的扰动,以及雷达信号处理等,均会改变一维距离像特性,给一维距离像目标识别造成了困难[9,11-13]。本文将对舰船目标一维距离像进行仿真,并研究一维距离像对姿态角、海面起伏、雷达带宽和加窗处理的敏感性,为雷达目标识别的特征提取等后续工作提供技术支持。
1 舰船目标一维距离像影响因素
1.1 舰船姿态角及雷达带宽
一维距离像的本质是目标散射中心在雷达径向上的分布。舰船姿态角变化,导致不同散射中心在雷达径向上的相对位置变化,一维距离像随之改变,故舰船一维距离像对姿态角敏感[13]。
一般岸基对海雷达的天线架设高度为海拔几百米到一千多米,最大探测距离为几十公里,若不考虑海浪导致舰船倾斜,可推算出雷达掠射角大致所处的范围为0.5°~5°。所以,相对于可以在0°~360°范围内变化的方位角,掠射角变化对舰船一维距离像的影响可忽略不计,因此本文只考虑方位角敏感性。
利用高分辨率雷达获取舰船一维距离像时,距离分辨力δ与雷达带宽B关系式为
(1)
式中,C=3×108m/s为光速。
由式(1)可知,雷达信号带宽越宽,则距离分辨力越高。对于舰船散射中心模型,散射中心在雷达径向上相对距离越近,区分散射中心的难度越大,要求雷达信号的带宽越宽。
1.2 方位角相关系数矩阵
为了定量地说明一维距离像之间的差异,本文引入相关系数的概念。相关系数是用来反映变量之间关系密切程度的统计指标,变量X、Y的相关系数ρXY定义为
(2)
由式(2)可知,|ρXY|取值在0~1之间,其值越高,表示X、Y相关度越高,反之,相关度越低。通常,|ρXY|≥0.8时,认为变量X、Y有强相关性。
求解方位角在1°~360°范围内,任意两个整数角度的舰船一维距离像之间的相关系数,得到一个360×360的矩阵,不妨称其为一维距离像方位角相关系数矩阵。方位角相关系数矩阵可以鲜明地表征不同方位角的一维距离像之间的差异。
1.3 海面起伏
舰船在海面上航行时,海面对舰船目标的镜像作用表现在使电磁波信号在海洋表面与目标表面之间产生多次反射或散射,直射波与反射波在空间中相干,导致各散射中心回波能量不同程度地改变,这对舰船目标散射特性的影响是不可忽略的。根据文献[14],海面对目标雷达回波影响通常用影响函数表示。影响函数是指,在距离相同的条件下,海面上目标的电磁波入射场E强度与自由空间中入射场E0强度之比
(3)
舰船散射中心模型不同散射中心的影响函数之间的差异越大,表示海面的干涉作用对舰船雷达回波的影响越大。因此,本文定义所有散射中心的影响函数的最大值与最小值之比为参数υ,用来表征海面干涉作用的强度,即
(4)
式中,Ω={V1,V2,…,VN}为所有散射中心的影响函数构成的集合。
1.4 加窗处理
普通脉冲雷达的时宽带宽积约为1,为了提高距离分辨力同时兼顾雷达作用距离,通常采用脉冲压缩体制雷达[3]。脉冲压缩的原理是对宽脉冲进行频率或相位调制,使其具有和窄脉冲相同的带宽,通过接收机的匹配滤波器压缩后,也具有和窄脉冲相同的时宽。脉冲压缩技术根据调制方式可分为线性调频、非线性调频和相位编码技术,其中,线性调频是目前最常用的脉冲压缩技术。
由于线性调频脉冲压缩会产生较高的距离副瓣(第一距离副瓣的高度为-13.2 dB),通常采用在时域上对信号做加权处理,即加窗处理,来抑制距离副瓣。常用的窗函数有:海明(Hamming)窗、汉宁(Hanning)窗、布莱克曼(Blackman)窗和凯泽 (Kaiser) 窗等[15]。
2 舰船目标一维距离像特性分析
2.1 姿态角敏感性
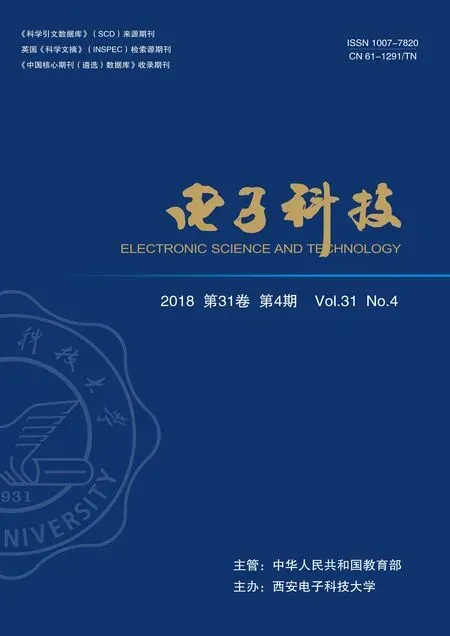
仿真方位角为1°~30°时的舰船一维距离像,按方位角排列,如图1所示,不同方位角的舰船一维距离像有显著的区别,具体表现在:(1)一维距离像长度对方位角敏感;(2)波峰数目及分布对方位角敏感。出现了两个或多个波峰之间的距离逐渐扩大的现象以及两个或多个波峰逐渐靠拢最终合并为一个波峰的现象;(3)在一些角度“突然”多出了一个波峰,在一些角度有波峰“突然”消失。
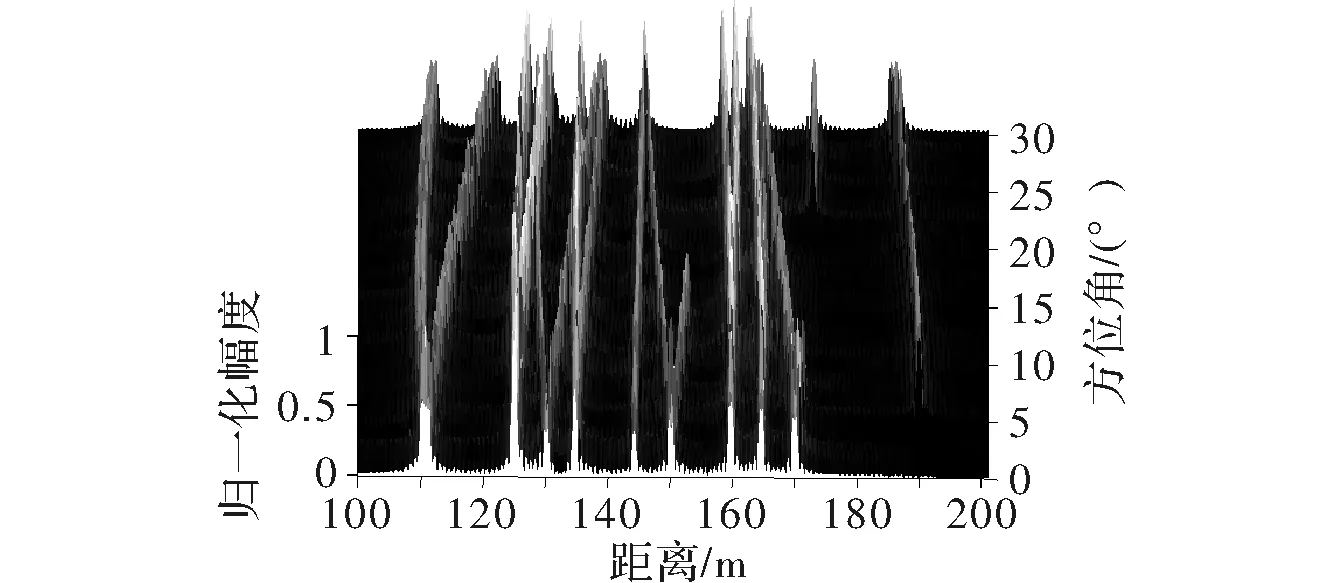
图1 方位角为1°~ 30°的舰船一维距离像
因为一维距离像长度与舰船在雷达径向投影的长度成正比,方位角变化改变舰船在雷达径向投影的长度,导致距离像长度变化。方位角变化,舰船散射中心在雷达径向上的相对距离发生变化,即发生了距离游移。散射中心遮挡变化导致波峰的出现和消失。
求解舰船散射中心模型的一维距离像方位角相关系数矩阵,如图2所示。方位角相关系数矩阵的两条对角线附近各有一条相关系数值远高于别处,且非常接近于1的带状区域。另外,该矩阵还有4个以方位角为90°和270°为中心的相关系数值较高的“特殊区域”。
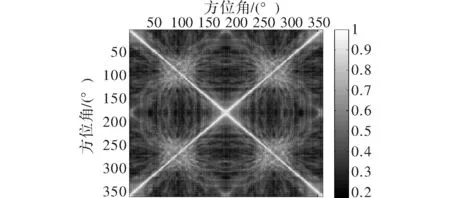
图2 一维距离像方位角相关系数矩阵
根据仿真结果,方位角相差约10°的范围内,相关系数高于0.8,舰船一维距离像高度相似。方位角之和约为360°时,舰船一维距离像也高度相似。因为雷达向舰船左、右两舷对称照射时,舰船散射中心在雷达径向上分布
相近。舰船方位角约为90°或270°时,舰船的船舷对准雷达照射方向,横跨距离单元数少,散射中心在雷达径向上分布集中,导致一维距离像方位角敏感度降低。
2.2 雷达带宽敏感性
不同雷达带宽下的一维距离像方位角相关系数矩阵如图3所示。根据仿真结果,雷达带宽越窄,方位角相关系数矩阵的整体值越高,不同方位角的一维距离像之间的相关度越高,即一维距离像的方位角敏感度越低。因为带宽越窄,同一距离单元所包含的散射中心数目越多,一维距离像包含的散射中心信息越少,对舰船的描述也越不精确,导致舰船散射中心在雷达径向上分布变化的敏感性降低。
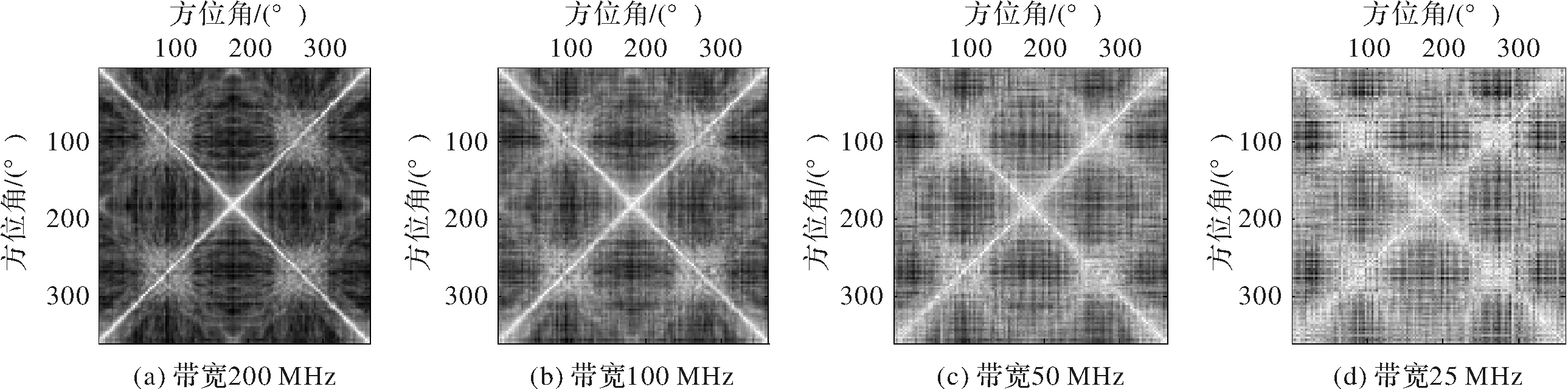
图3 不同带宽下的一维距离像方位角相关系数矩阵
2.3 海面起伏敏感性
计算不同海面起伏均方根高度值μ时,所有舰船散射中心的影响函数,搜索其中的最大、最小值,并求解参数υ。参数υ与μ的关系如图4所示,参数υ与海面起伏高度μ呈负相关关系,当海面起伏趋近于0时,参数υ值急剧上升。
根据仿真结果,海面越平静,不同散射中心的影响函数值差距越大,海面镜像作用使得舰船一维距离像与自由空间中的差距越大。原因在于海面对电磁波影响包括镜面反射和漫反射两种,海面越平静,散射作用减弱,而反射作用增强,从而导致多路径之间的电磁波相干性增强。对于多散射中心而言,海面越平静,干涉作用对不同散射中心回波造成的强度变化差距就越大。
2.4 加窗处理敏感性
加窗处理后的一维距离像如图5所示(图中凯泽窗的参数β=50)。不加窗的一维距离像存在明显起伏的距离旁瓣,加窗后距离旁瓣显著降低。加窗后距离像主瓣展宽、峰值降低,且由于主瓣展宽,加窗后相邻足够近的两个或多个波峰合并为一个,距离分辨力降低。对于不同的窗函数,加β=50的凯泽窗的一维距离像上述现象最明显,加海明窗、汉宁窗和布莱克曼窗的一维距离像抑制旁瓣、主瓣降低和展宽的效果比较接近,介于不加窗和加β=50的凯泽窗之间。
加窗处理通过展宽主瓣来换取对旁瓣的抑制。因此,对于单个散射中心回波,距离旁瓣降低,主瓣峰值降低并展宽。相邻足够近的主瓣展宽后合并,导致雷达的距离分辨力降低。
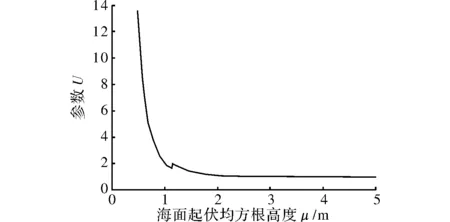
图4 参数υ与海面起伏高度μ的关系图
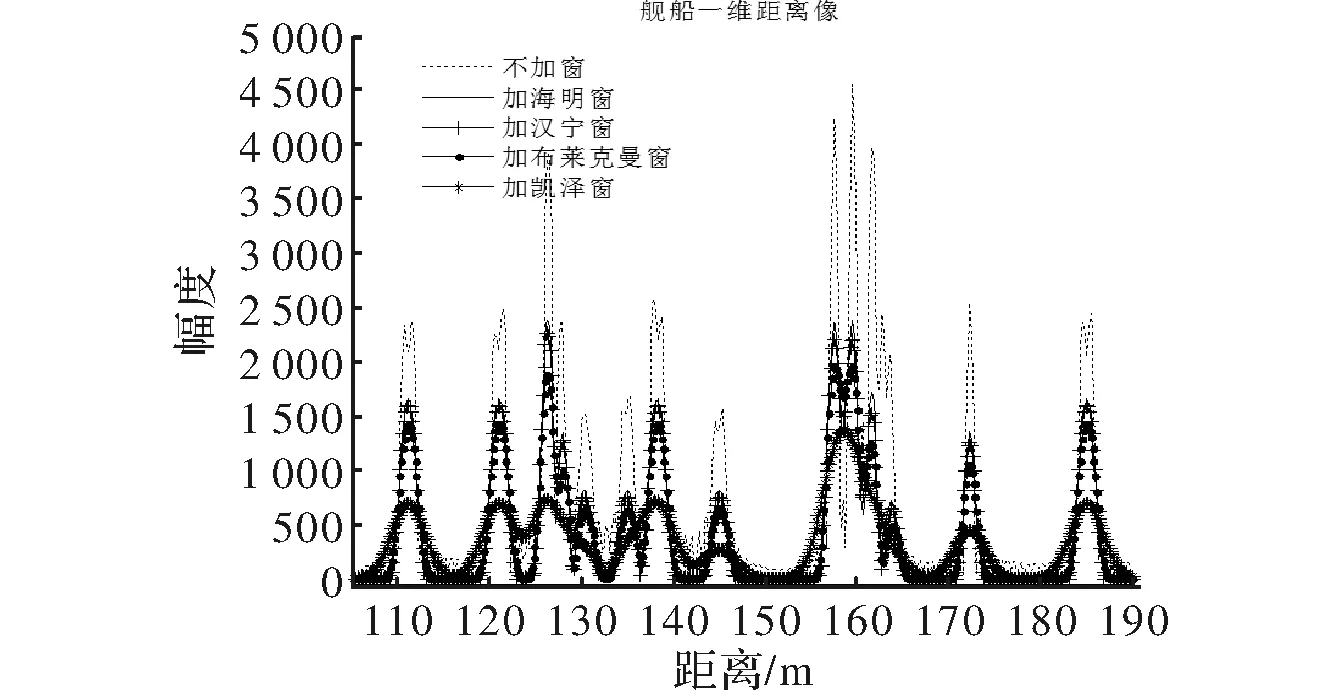
图5 加窗后的舰船散射中心模型一维距离像
3 结果验证
为了验证仿真结果,本文在CST微波工作室(CST Microwave Studio)环境下建立了舰船模型,分析电磁波在舰船表面的散射情况,获取目标雷达回波。
CST 微波工作室[16]是一款专用于设计、分析中高频无源器件及天线的软件,适用于全电磁频段。该软件的工作原理是首先对目标进行网格划分,利用射线弹跳法[17]仿真电磁波在物体表面的传播路径,并求解电磁波回波,获得目标的频域响应,即RCS信息。求解该舰船模型的一维距离像方位角相关系数矩阵,如图6(b)与舰船散射中心模型的方位角相关系数矩阵图6(a)作比对。
根据仿真结果,基于CST微波工作室的舰船模型的方位角相关系数矩阵的整体数值高于舰船散射中心模型,但两者具有相同的特征,即两条对角线附近各有一条相关系数值远高于别处,且非常接近于1的带状区域;有4个以方位角为90°和270°为中心的相关系数值较高的“特殊区域”。因此,用两种方法仿真得到的舰船目标一维距离像方位角敏感性基本吻合。实验结果验证了本文利用舰船散射中心模型分析一维距离像特性的准确性。
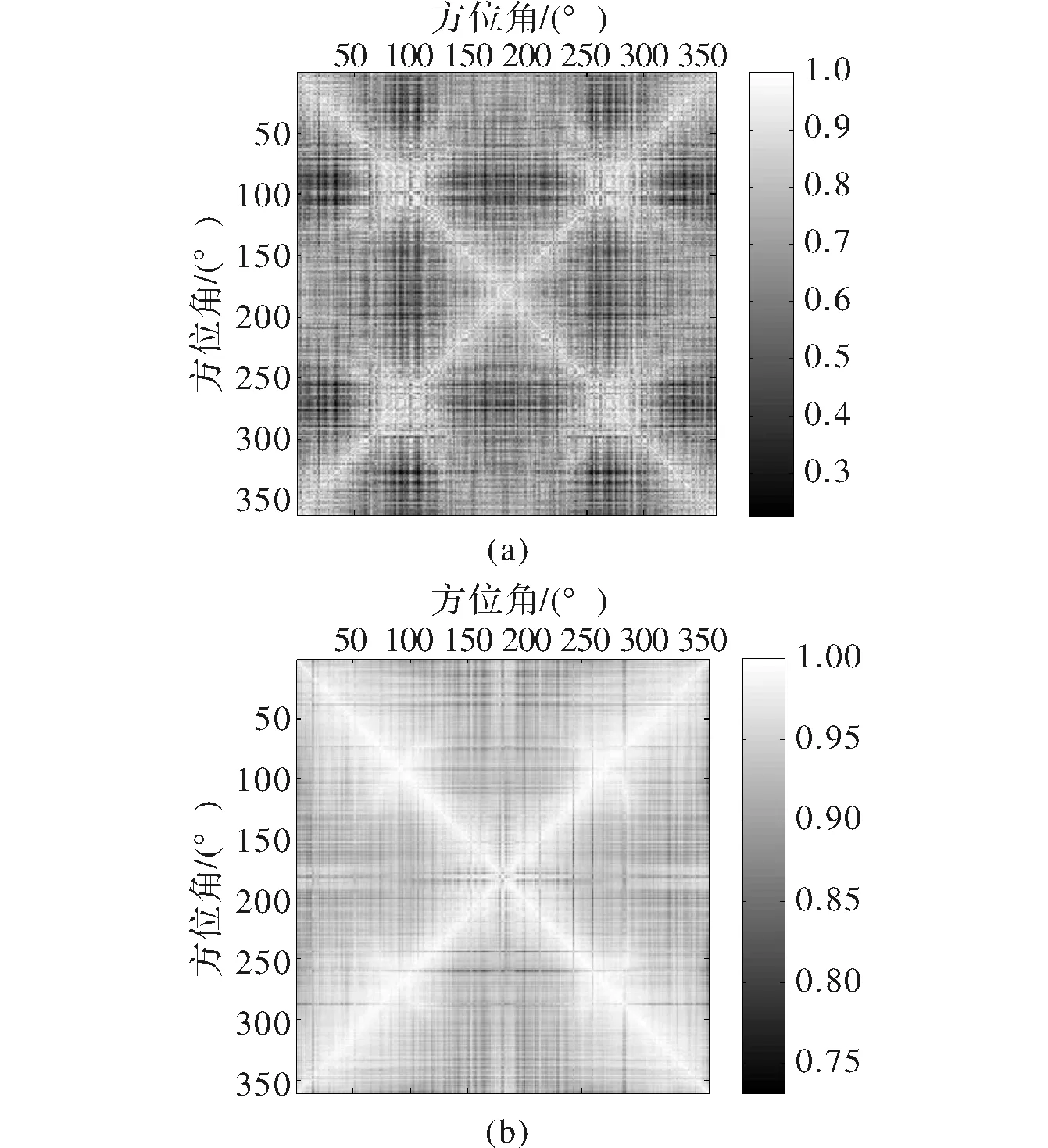
图6 两种舰船模型方位角相关系数矩阵
4 结束语
本文基于舰船散射中心模型,对舰船目标一维距离像做了仿真实验,分析了舰船目标一维距离像特性。利用CST微波工作室对仿真结果进行验证,结果显示:方位角变化对一维距离像有显著影响,但在一定方位角范围内,一维距离像具有相似性。雷达带宽越窄,一维距离像的方位角敏感度越低。海面起伏越小,海面的多径效应越显著。加窗处理可以抑制距离旁瓣,但同时展宽主瓣,降低了雷达距离分辨力。
[1]Li H, Yang S. Using range profiles as feature vectors to identify aerospace object[J]. IEEE Transactions on AES, 1993, 41(3):261-280.
[2]Zyweek A, Bogner R E. Radar target recognition using range profiles[J]. IEEE International Conference on ASSP,1994,2(6):373-376.
[3]张家昌,绕伟,蒋志国.雷达目标一维距离像仿真研究[J].电子测量技术,2013,36(5):38-40.
[4]赵鹏亮,曾海兵,陈珂.高分辨雷达一维距离像研究[J].电子科技,2014,27(1):95-99.
[5]Hallaj R, Mohseni R, Kazemi K. Aerial target recognition based on high resolution range profiles (HRRP)[M].Berlin:Springer International Publishing,2013.
[6]Lan D U, Liu H W, Zheng B, et al. A new feature extraction method using the amplitude fluctuation property of target HRRP for radar automatic target recognition[J].Frontiers of Electrical and Electronic Engineering,2006,1(2):171-176.
[7]王锦章.一种提高雷达HRRP识别和拒判性能的新方法[J].电子科技,2014,27(12):150-154.
[8]Zhou D. Orthogonal maximum margin projection subspace for radar target HRRP recognition[J]. EURASIP Journal on Wireless Communications and Networking,2016(1):72.
[9]杨莉.一维距离像特性分析及目标识别方法研究[D].哈尔滨:哈尔滨工业大学,2014.
[10] 孙昭峰.复杂背景的海上目标雷达信号特性研究[J].舰船科学技术,2016,38(8A):100-102.
[11] Liu Hongwei.Robust radar automatic target recognition algorithm based on HRRP signature [J]. Frontiers of Electrical and Electronic Engineering,2012,7(1):49-55.
[12] Pan Mian. Multi-task hidden markov modeling of spectrogram feature from radar high-resolution range profiles[J]. EURASIP Journal on Advances in Signal Processing,2012,2012(1):86-90.
[13] 张明敏,卢建斌,程广利.近距离水声模拟测量舰船目标雷达一维距离像[J].哈尔滨工程大学学报,2016,37(6):855-859.
[14] 席泽敏.舰船目标雷达HRRP水声模拟获取方法研究[D].武汉:海军工程大学,2011.
[15] 尹为民,欧阳华,钱美,等.数字信号处理[M].北京:机械工业出版社,2011.
[16] 张敏.CST微波工作室用户全书[M].成都:电子科技大学出版社,2004.
[17] 丁建军,陈磊,刘志伟,等.基于时域弹跳射线法分析电大尺寸目标的散射[J].系统工程与电子技术,2010,32(9):1846-1849.
猜你喜欢
作文新天地(小学版)(2022年8期)2022-05-30 04:30:04
红蜻蜓·低年级(2021年2期)2021-07-20 04:48:09
卷宗(2021年2期)2021-03-09 07:57:24
小学科学(2020年6期)2020-06-22 13:13:41
水利规划与设计(2020年1期)2020-05-25 08:01:28
空间科学学报(2020年4期)2020-04-22 01:17:04
小学生导刊(2017年18期)2017-05-17 05:44:37
中国医药指南(2016年1期)2016-07-11 11:57:51
河南科技(2015年18期)2015-11-25 08:50:14
Transactions of Nanjing University of Aeronautics and Astronautics(2015年2期)2015-11-24 02:39:22