一种汽车转向机构
2018-04-08 02:30刘通
大众汽车 2018年12期
刘通
重庆电讯职业学院 重庆 402247
1 技术领域
本发明涉及一种汽车的转向装置,具体是与汽车的非独立悬架配用的转向机构。
2 背景技术
汽车机械转向系是由转向操纵机构、转向器和转向传动机构三大部分组成。根据转向器位置和转向轮悬架类型不同,转向传动机构的组成和布置分为与非独立悬架配用的转向传动机构和与独立悬架配用的转向传动机构。这里讨论的是与非独立悬架配用的转向传动机构。转向传动机构是将转向器输出的力和运动传给转向桥两侧的转向节,使两侧转向轮偏转,并使两转向轮偏转按一定的关系变化,以保证汽车转向时车轮与地面的相对滑动尽可能小。
汽车转向机构是控制左、右前轮转角的部件。它使汽车在转向时,左、右前轮得到合理的偏转角匹配,从而使得各车轮绕同一瞬时转向中心,所有车轮与地之间均做纯滚动而不产生滑移,即阿克曼原理转向特性。目前各类汽车上使用的转向机构,由于机构原理的误差,都无法保证左、右前轮的转角关系完全符合阿克曼原理,从而导致汽车在转向过程中,车轮与地面之间存在着一定的滑移,影响汽车转弯时的稳定性,降低车轮使用寿命。
现有技术的汽车转动机构,如图1中左右两侧车轮偏转角α和β的理想关系为:
cotα=cotβ+B/L
式中:α表示汽车前外轮转角,β表示汽车前内轮转角,B表示两主销中心距,L表示汽车轴距。
因此转向传动机构转向梯形的几何参数需要优化确定,但是,目前只用杆作为转向的汽车转向机构,无法保证左、右前轮的转角关系完全符合阿克曼原理,从而导致汽车在转向过程中,车轮与地面之间存在着一定的滑移,影响汽车转弯时的稳定性,降低车轮使用寿命。
3 发明内容
本发明针对现有技术中的汽车转向机构无法保证左、右前轮的转角关系完全符合阿克曼原理,从而导致汽车在转向过程中,车轮与地面之间存在着一定的滑移,影响汽车转弯时的稳定性,降低车轮使用寿命等不足,提供一种新型的汽车转向机构,以使车辆在转向过程中,左、右前轮转角完全符合阿克曼转向特性,实现纯滚动,提高汽车转弯时的稳定性、延长轮胎寿命。
本发明的技术方案:一种汽车转向机构,包括方向盘、转向直拉杆,转向直拉杆的一端与方向盘连接;其特征在于:转向直拉杆的另一端与转向节臂的一端可转动连接,转向节臂的另一端与左梯形臂之间可转动连接;左梯形臂、右梯形臂的一端都与机架可转动连接,左梯形臂、右梯形臂的另一端可转动式连接转向横拉杆,转向横拉杆、右梯形臂、机架、左梯形臂之间构成一个梯形结构或矩形结构;
在右梯形臂上设置一个可滑动的套筒,在套筒上设置滚子;设置一固定的滑槽,滚子设置在滑槽内;滚子在滑槽内移动时,带动套筒、右梯形臂相应移动或转动。
进一步的特征是:所述的滑槽固定在机架上。
本发明的汽车转向机构,相对于现有技术,具有如下特点:
1、通过滚子在滑槽中受限的运动,可以保证在转向过程中,左、右前轮转角完全符合阿克曼转向特性,理论误差为零,实现纯滚动。
2、提高汽车转弯时的稳定性,延长轮胎寿命。
3、本转向机构采用杆件完成,与目前其他采用齿轮等线接触高副机构相比,运动副为面接触,可以承受更大的力,且结构简单,易于实现生产。
4 附图说明
图1是现有技术车轮转向关系示意图;
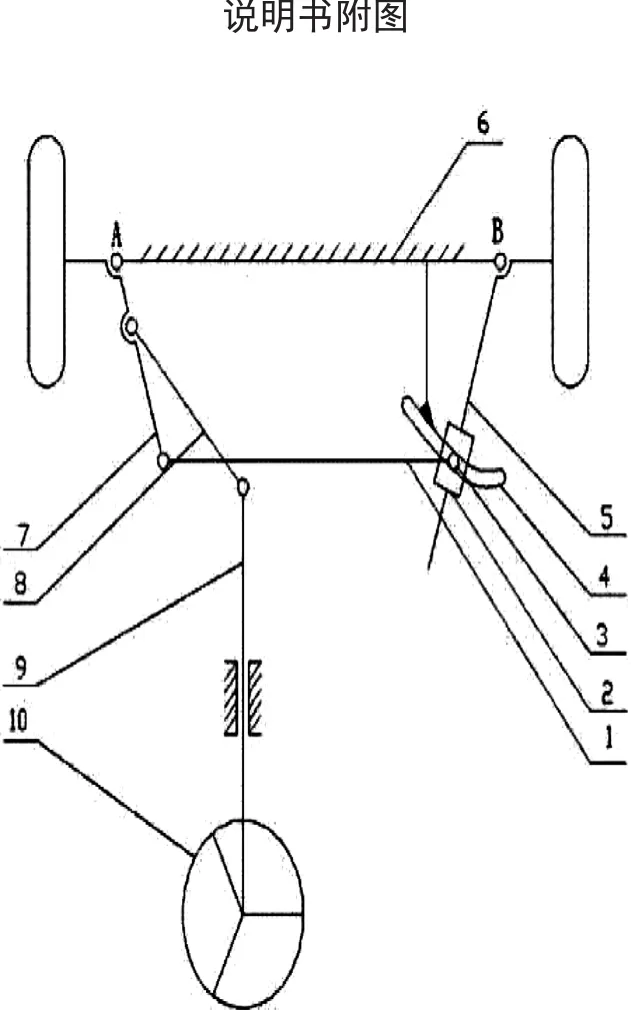
图中,1—转向横拉杆,2—套筒,3—滚子,4—滑槽,5—右梯形臂,6—机架,7—左梯形臂,8—转向节臂,9—转向直拉杆,10—方向盘。
5 具体实施方式
如图2中,本发明的汽车转向机构,包括方向盘10、转向直拉杆9,转向直拉杆9的运动方向固定,通常垂直于机架6,转向直拉杆9的一端与方向盘10连接,方向盘10与转向直拉杆9之间采用现有的齿轮齿条机构连接(未画出),使转向直拉杆9得到一个沿杆方向的推力。
转向直拉杆9的另一端与转向节臂8的一端可转动连接,转向节臂8的另一端与左梯形臂7之间可转动连接,转向直拉杆9与转向节臂8之间、转向节臂8与左梯形臂7之间均形成一个转动副,以传递转向时(转动方向盘10)产生的推力;左梯形臂7、右梯形臂5的一端都与机架6可转动连接,左梯形臂7、右梯形臂5的另一端可转动式连接转向横拉杆1,转向横拉杆1、右梯形臂5、机架6、左梯形臂7之间构成一个梯形结构或矩形结构(图中所示为梯形结构)。在右梯形臂5上设置一个可滑动的套筒2,两者之间构成移动副;在套筒2上设置滚子3,图中滚子3是固定在套筒2上的,套筒2与右梯形臂5之间构成滑动移动副;设置一固定的滑槽4,图中滑槽4与机架6固定设置,滚子3设置在滑槽4内,能在滑槽4内移动(滑动);滚子3在滑槽4内移动时,带动套筒2、右梯形臂5相应移动或转动。
在右转向时,驾驶员右转方向盘10,通过方向盘10与转向直拉杆9之间的齿轮齿条机构(未画出),使转向直拉杆9得到一个沿杆方向的推力;转向直拉杆9经转向节臂8、左梯形臂7传递转向推力,使得左梯形臂7绕其与机架6的连接点(图中的A铰链点)顺时针转,带动左前轮右转;左梯形臂7与转向横拉杆1之间由转动副连接,由于左梯形臂7的顺时针转,带动转向横拉杆1向左运动;从而使得滚子3随着转向横拉杆1运动;由于滚子3放置在滑槽4中,因此滚子的运动轨迹沿着滑槽向左滚动,其中滑槽4固定在机架6上;在这个过程中,由于滚子3是固定在套筒2上的,套筒2与右梯形臂5之间构成滑动副,所以套筒2在右梯形臂5上滑动,从而带动右梯形臂5绕其与机架6的连接点(图中的B铰链点)顺时针转,而右前轮右转。这样整个过程就实现了汽车的右转,且能保证左前轮与右前轮的转角关系完全符合阿克曼转向特性。
在汽车左转时的情形与右转相类似。
本发明实现原理分析:
本发明转向结构的理论误差可以为零,左、右前轮转角关系可完全符合阿克曼转向特性,实现车轮绕同一瞬时转向中心纯滚动的新转向机构,且转向功能完全由杆机构实现。
在右梯形臂上增加一个套筒,两者之间构成移动副;套筒与转向横拉杆之间通过固定在套筒上的滚子构成转动副连接。设置一个固定滑槽,将滚子置于其中,即固定滚子运动轨迹。其中滑槽特征在于:运用Solidworks的建模及COSMOSMotion的运动仿真功能,在左梯形臂上,添加一个运动,运动方式为角位移α,右梯形臂也添加一个运动,运动方式为阿克曼公式得到的转角β,自变量α为:α=1Xtime
β=Atan(1/(1/Tan(α)-B/L))
这样,左、右梯形臂转角关系完全符合阿克曼原理。
猜你喜欢
农业装备与车辆工程(2022年7期)2022-10-31
科学技术创新(2022年28期)2022-10-21
机械设计与制造(2022年10期)2022-10-12
机床与液压(2022年7期)2022-09-17
轴承(2022年2期)2022-06-08
科技与创新(2021年15期)2021-11-28
西安航空学院学报(2021年1期)2021-07-20
商情(2020年31期)2020-07-23
航空学报(2020年5期)2020-06-03
发明与创新·中学生(2018年8期)2018-09-08