
基于改进NSGA?Ⅱ算法的纯电动汽车机电复合制动控制策略研究
2018-04-04 09:10潘盛辉许平宋仲达吴甜甜
现代电子技术 2018年7期
潘盛辉 许平 宋仲达 吴甜甜
摘 要: 为了使纯电动汽车在制动过程中满足制动安全和充分回收制动能量的需求以及保持一定的制动舒适度,引入最优前端个体系数对NSGA?Ⅱ多目标遗传优化算法进行改进,并将解集筛选模块应用到制动控制器的设计中,随后嵌入到ADVISOR中进行仿真测试。实验结果表明,提出的控制策略可以有效保证足够的制动安全性,在能量回收效率和制动舒适性方面较标准的NSGA?Ⅱ算法优化的控制策略均有提高。
关键词: 纯电动汽车; 机电复合制动系统; NSGA?Ⅱ; 制动力分配; 控制策略; 制动安全
中图分类号: TN876?34; U469 文献标识码: A 文章编号: 1004?373X(2018)07?0097?05
Research on modified NSGA?Ⅱ algorithm based electro?mechanical
hybrid braking control strategy of electric vehicle
PAN Shenghui1, XU Ping2, SONG Zhongda1, WU Tiantian1
(1. Guangxi University of Science and Technology, Liuzhou 545006, China; 2. Liuzhou No.1 Vocational and Technical School, Liuzhou 545007, China)
Abstract: In order to make that the electric vehicle can meet the requirements of braking safety and sufficient energy recovery in braking process, and maintain a certain braking comfort level, an optimal front?end individual coefficient is introduced to improve the multi?objective genetic algorithm based on non?dominated sorting genetic algorithm?Ⅱ (NSGA?Ⅱ). The solution set screening module is applied to the design of braking controller, and embedded into ADVISOR for simulation test. The experimental results show that the control strategy can ensure the sufficient braking safety, and its energy recovery efficiency and braking comfort level are improved than those of control strategy based on standard NSGA?Ⅱ algorithm.
Keywords: electric vehicle; electro?mechanical hybrid braking system; NSGA?Ⅱ; braking force distribution; control strategy; braking safety
0 引 言
在能量管理系统的控制下,电机在纯电动汽车制动过程中可以有效地回收制动能量,提高车辆的能量利用率。然而,电机通常能够提供的力矩有限,且受到自身外特性的约束,所以纯电动汽车的制动系统须由电机系统和机械制动系统共同组成。如何在总的制动力矩中分配机械制动力矩和电机制动力矩是复合制动控制系统所要解决的主要问题之一[1],并且分配的结果须满足所需的制动效能[2]和稳定性,充分回收制动能量以及保持制动舒适性。
近年来,诸多学者对机电复合制动力控制分配提出了一些解决方法[3?7],都是以单个目标或某个目标为主的多目标进行策略设计,取得了一定的成果。而文献[8?9]将机电复合制动归为多目标优化问题,得到的Pareto解集可以较好地解决多个评价函数竞争的问题。然而这种带精英策略的非支配排序遗传算法存在种群分布不均匀、全局搜索能力较弱以及运算速度较慢的不足[10],且在控制器运行过程中,制动力分配结果会在诸多解集中随机挑选,造成电机制动力和前后轴制动力在短时间内大幅度变化,从而影响制动的舒适性。
针对以上出现的问题,本文提出一种基于改进NSGA?Ⅱ(Non?dominated Sorting Genetic Algorithm?Ⅱ)多目标优化算法的纯电动汽车机电复合制动控制策略,该算法引入最优前端个体系数概念,在Pareto最优前端通过锦标赛制度筛选出在前沿面的种群,使均匀分布的个体保留下来,防止早熟,提高了算法的收敛速度。另外,新添加的选择模块从最优前端中选择与上一个输出状态距离最近的个体作为最终结果,可以使车辆各执行机构输出变化相对最小,有效提高了制动的舒适度。
1 机电复合制动
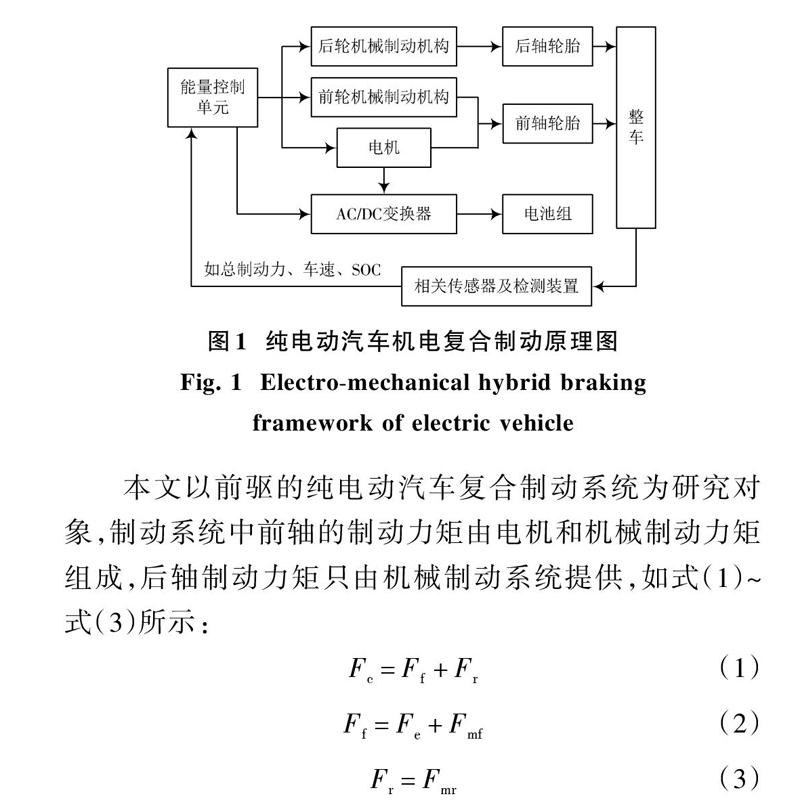
机械制动是利用制动盘与液缸或气缸之间的摩擦作用而达到使车辆减速的过程,车辆的动能最终以热的形式散发到空气中。这种制动方式输出力矩大、工作稳定可靠,并得到了广泛的应用。电机制动过程是在驾驶员有一定的制动需求下,轮胎与地面之间的摩擦力通过传动系统带动电机工作在其外特性曲线的第二象限内,由发电产生的电流经AC/DC变换器转换后存储到电储存装置中[11]。这种制动方式可以有效地回收制动能量,延长车辆续驶里程,但受到自身外特性的限制,能够提供的制动力矩有限且与车速等因素有关。纯电动汽车的机电复合制动系统原理如图1所示。
本文以前驱的纯电动汽车复合制动系统为研究对象,制动系统中前轴的制动力矩由电机和机械制动力矩组成,后轴制动力矩只由机械制动系统提供,如式(1)~式(3)所示:
式中:[Fc]为总制动力;[Ff]为前轮制动力;[Fr]为后轮制动力;[Fe]为电机制动力;[Fmf]为前轮机械制动力;[Fmr]为后轮机械制动力。
2 机电复合制动多目标优化
纯电动汽车机电复合制动系统的主要任务是合理分配车辆前、后轴制动力及机械摩擦制动力与电动机制动力分配两部分:前、后轴制动力的分配主要影响制动时的制动效能和方向的稳定性;机械摩擦制动力与电动机制动力分配主要影响的是制动能量的回收以及制动的舒适性。因此,复合制动系统制动力分配的设计目标是:保证车辆制动安全;尽可能多地回收制动能量;保持一定的制动舒适性。然而,多个控制目标之间却存在相互制约的关系,不能同时达到最优。因此,机电复合制动控制实际上就是一种多目标优化问题。
2.1 优化变量选取
根据汽车动力学理论,车辆的制动器制动力分配系数[β]应控制在I曲线、f线、ECE线包围的范围内。另外,电机制动力矩[Tm]的参与直接影响到能量回收的充分性和制动舒适性,且[Tm]的输出与电机转速、电池的状态都有着密切的联系。因此,本文选择的优化设计变量[X]为:
2.2 目标函数
2.2.1 制动安全性
利用附着系数可以定量地表示车辆对路面附着条件的利用状况。
显然,利用附着系数越接近制动强度,地面的附着条件就会发挥的越充分。最理想的安全状态是利用附着系数等于制动强度。因此将制动稳定性的目标函数写为:
式中[φf]和[φr]分别表示前后轴利用附着系数。
2.2.2 能量回收的充分性
设电机的发电效率为[η1,]DC?DC转换器的转换效率为[η2,]蓄电池的充电效率为[η3,]则电能回收效率可以表示为:
因此,表示能量回收充分性的目标函数为:
式中:[Tm]是电机输出力矩,单位是N·m;[ω]是电机转子角速度,单位是rmp。
2.3 约束条件
2.3.1 ECE法规线
联合国欧洲经济委员为保证行车制动安全,制定的ECE R13法规对车辆制动过程中前后轴制动力比例提出了明确的要求:
2.3.2 电机制動力
电机制动力的确定主要受到自身外特性的约束,假定所选电机制动力矩和驱动力矩大小相当:
2.3.3 电池充电特性
蓄电池充电接受能力的大小对制动能量回收的发挥起决定作用。蓄电池的功率有限,传输给电池的功率不能超过电池的最大充电功率。
2.3.4 制动的舒适性
制动舒适性的影响因素主要是考虑汽车在制动过程中减速度的突变。文献[12]建立的制动感觉指数实验评估体系(BFI)可以有效反映制动舒适性的主观感受。因此优化设计过程中考虑制动力突变时线性度的约束:
式中[α]是制动感觉极限线性度指数系数,可取0.8。
3 改进NSGA?Ⅱ算法及其应用
在多目标优化算法中,基于NSGA?Ⅱ的遗传算法应用广泛,提出了精英机制的非支配排序,其分级快速排序降低了算法的复杂程度[8?9]。但是该算法在处理父代和子代合并的过程中,只在非支配前沿面末端进行密度筛选,排在前面的非支配集可能会存在拥挤度大、个体相近的问题,这种选择过程在一定程度下会导致种群收敛点分布不均匀、速度较慢[10]。本文提出的改进算法通过设置最优前端个体系数控制最优前端种群的个体数量,在修剪种群时,当最优前沿面的个体数大于设定量时,需进一步以密度为条件筛选,降低种群分布密度,直到该层面分布的个体数量小于或等于设定的量。这种方式可以有效地改善前沿面分布密度,进而防止早熟。种群进化示意图如图2所示。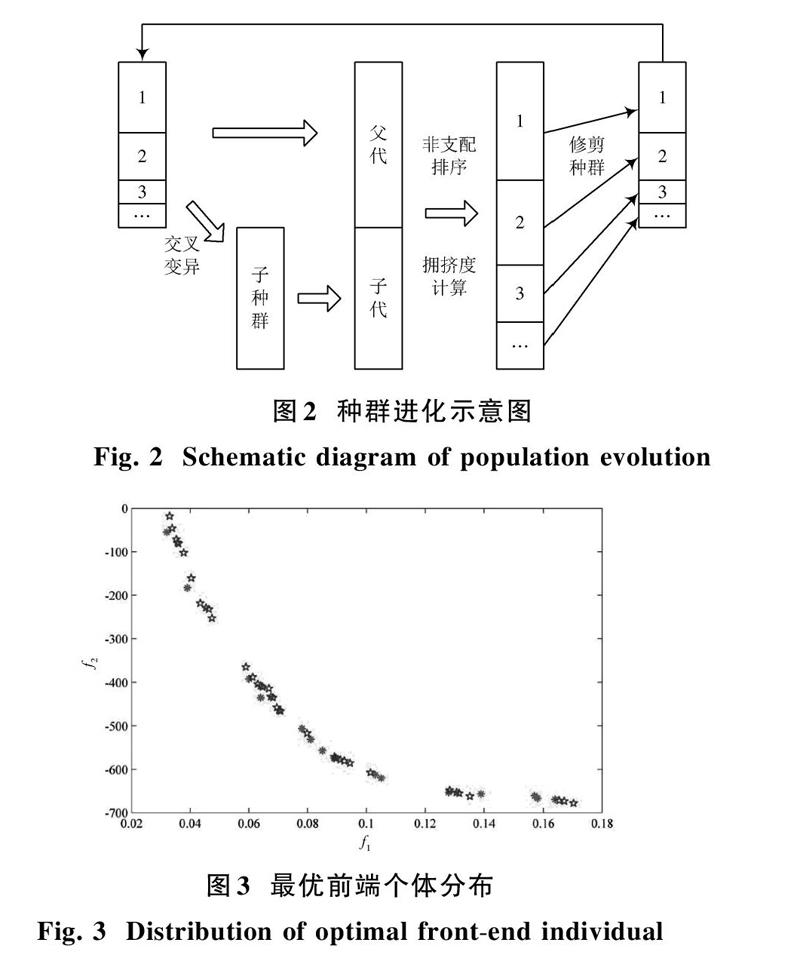
除此之外,由标准的NSGA?Ⅱ优化算法得到的结果是一个最优解集,只能人为从中选择一个解作为最终结果。而考虑到实际制动过程中,为避免电机制动力大小和前后轴制动力分配系数在短时间内变化过大给制动系统带来较大的负担和引起的驾驶员制动感觉不适,本文对最优解集进一步处理,在待选的个体间再增加一个优化函数,设[Tm]和[T′m]分别是[t]和[t-1]时刻的制动力分配系数和电机制动力矩,[β]和[β]分别是[t]和[t-1]时刻分别对应的值,[γ1,γ2]分别为[β]和[Tm]差值的权重系数。则公式可以表达为:
[minf=γ1Tm-T′m2+γ2β-β2] (13)
假设车辆在[v=]60 km/h的路况下以[z=]0.2制动,在求解[β]和[Tm]的过程中,设置种群规模大小为100,初始种群均匀分布,锦标赛选择法选择父代,交叉率为0.8,变异率为0.1,最优前端个体系数为0.15,最大进化代数为100。
最优前端个体分布如图3所示。从图3中可以看出,改进的NSGA?Ⅱ算法最终得到了15个Pareto最优前端个体,说明算法有效地控制了最优前端个体数量。而其Pareto分布较标准的目标函数的平均值对比分别如图4、图5所示。由图4、图5可得,种群在进化过程中,目标函数[f1]和[f2]的值均收敛,标准的NSGA?Ⅱ算法在进化代数的中段出现了进化停滞的现象。因此,和改进的NSGA?Ⅱ算法相比,虽然在进化代数的前半段收敛速度快于后者,但是本文提出的算法在整体上有更快的收敛速度,分析原因是改进的NSGA?Ⅱ算法在迭代的过程中引入局部竞争机制有效地控制了最优前端的数量和密度,使种群维持了较好的多样性,而且算法也不易陷入过早收敛和停滞现象。

4 仿真研究
根据算法优化的策略对ADVISOR2002相关控制模块进行修改,修改后的模型如图6所示。
本文在相同的工况下对比了三个控制策略:方案1为ADVISOR自带的控制策略;方案2为基于标准NSGA?Ⅱ优化算法的控制策略;方案3为基于改进的NSGA?Ⅱ优化算法的控制策略。
4.1 制动安全性验证
将初速度为60 km/h,制动强度斜率为1的正比例函数作为行驶工况进行仿真。仿真结果如图7所示。
由图7易得,方案2和方案3的前后轴比例分配点都处在I曲线、ECE线和f线之间的合理范围之内,说明两种控制策略都满足汽车理论及相关法规的要求,是安全可靠的。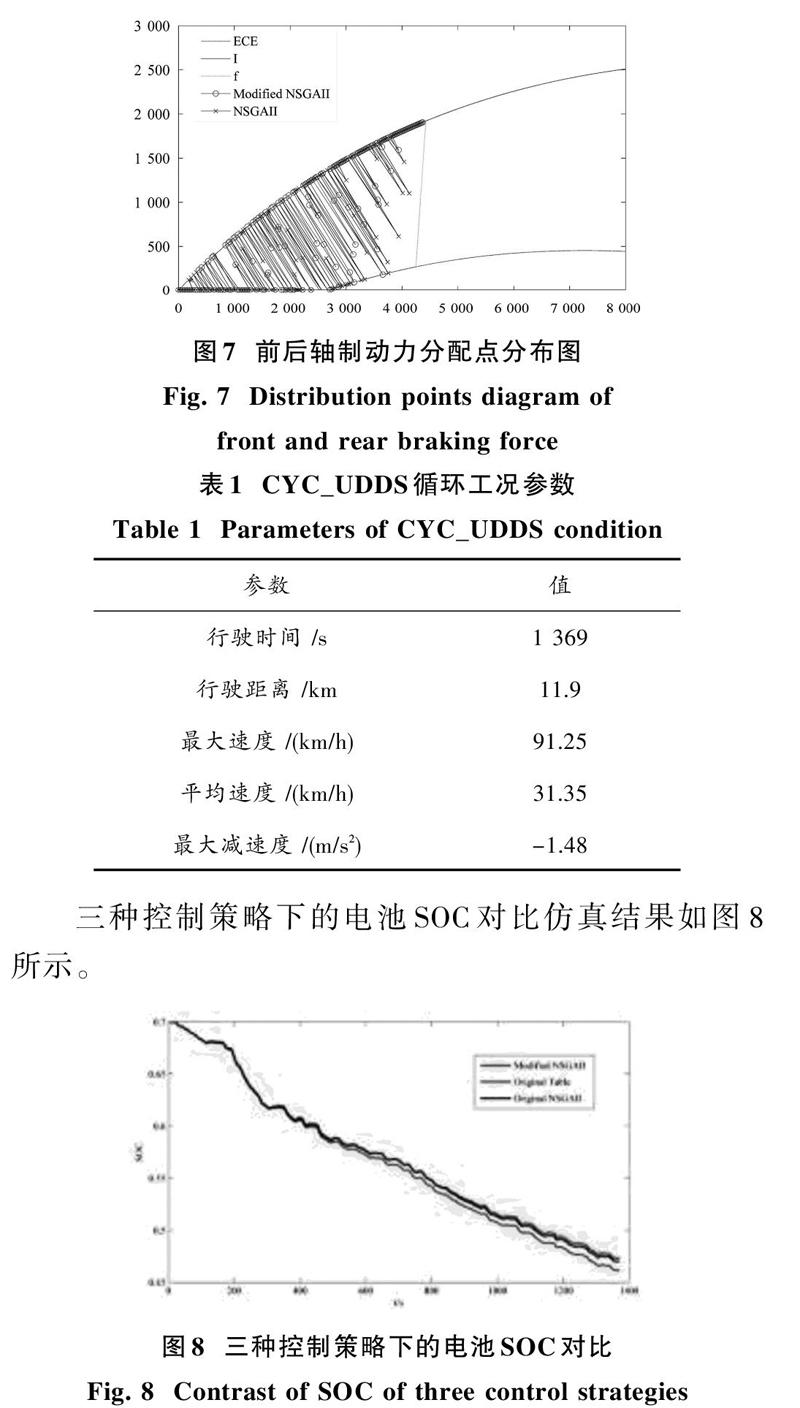
4.2 制动能量回收充分性
本文选择美国环境保护机构(EPA)制定的城市工况CYC_UDDS来验证纯电动汽车机电复合制动策略的控制效果,该工况兼顾了道路拥挤状况与城郊行车较为顺畅的工况。考虑到车辆每次上路时电池不一定都是充满的,所以设置初始SOC为0.7。CYC_UDDS循环工况参数如表1所示。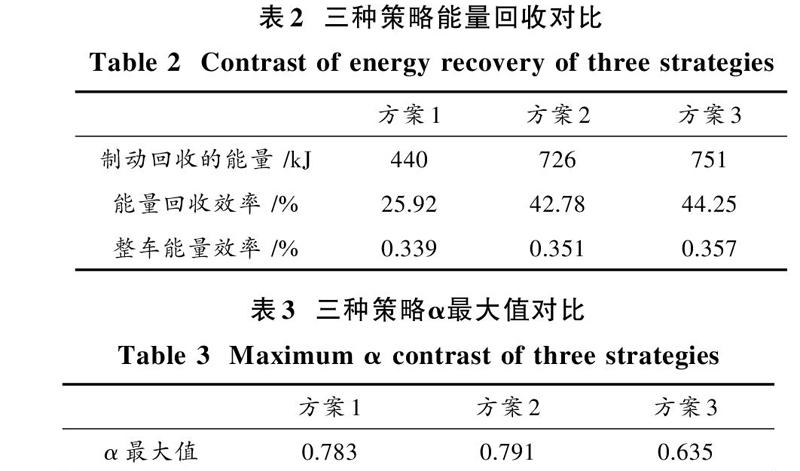
三种控制策略下的电池SOC对比仿真结果如图8所示。
由图8易得,对比方案1和方案2,方案3得到的SOC曲线相对平缓。因此,在同等行驶工况下,蓄电池可获得的剩余电量最多。
三种策略能量回收对比如表2所示。由表2可知,纯电动汽车采用本文提出的方案3回收的制动能量较方案1以及方案2分别提高了18.33%和1.47%,即在频繁的加、减速过程中可以提高能量回收效率,延长汽车的行驶距离。
4.3 制动舒适度对比
利用式(12)分别求出每种策略在CYC_UDDS工况下[α]最大值并进行对比,具体见表3。
由表3易知,基于改进的NSGA?Ⅱ优化的控制策略在控制[α]大小方面表现较好,因此可明显降低由于策略上的缺失,即制动机构工作状态大幅度切换导致的制动感觉不适。方案2的[α]值最大,引起的原因是在Pareto最优解集中隨机选择的[β]和[Tm]没有考虑相对于上一个状态的变化程度。
5 结 语
本文提出的基于改进的NSGA?Ⅱ优化的控制策略的仿真结果在各指标上均优于标准NSGA?Ⅱ优化的控制策略和ADVISOR自带控制策略的仿真效果,满足制动法规要求,同时有效地提高了能量的利用效率,尤其是在提升制动舒适度方面,解决了标准NSGA?Ⅱ算法解的随机性,可以使驾驶员获得较好的制动舒适性。
参考文献
[1] SATZGER C, DE CASTRO R, BUNTE T. A model predictive control allocation approach to hybrid braking of electric vehicles [C]// Proceedings of 2014 IEEE Intelligent Vehicles Symposium. Dearborn, USA: IEEE, 2014: 286?292.
[2] 余志生.汽车理论[M].北京:机械工业出版社,2005:88.
YU Zhisheng. Automobile theory [M]. Beijing: China Machine Press, 2005: 88.
[3] GAO Yimin, CHEN Liping, EHSANI Mehrdad. Investigation of the effectiveness of regenerative braking for EV and HEV [J]. SAE, 1999(1): 2910.
[4] 李玉芳,周丽丽.纯电动汽车电?液复合制动系统控制算法的多边界条件优化设计[J].中国机械工程,2012,23(21):2634?2640.
LI Yufang, ZHOU Lili. Optimization design of EV electro?hydraulic composite braking system control algorithm with multi?boundary conditions [J]. China mechanical engineering, 2012, 23(21): 2634?2640.
[5] 刘丽君,姬芬竹,杨世春,等.基于ECE法规和Ⅰ曲线的机电复合制动控制策略[J].北京航空航天大学学报,2013(1):138?142.
LIU Lijun, JI Fenzhu, YANG Shichun, et al. Control strategy for electro?mechanical braking based on curves of ECE regulations and ideal braking force [J]. Journal of Beijing University of Aeronautics and Astronautics, 2013(1): 138?142.
[6] 王耀南,刘东奇.电动汽车机电复合制动力分配策略研究[J].控制工程,2014(3):347?351.
WANG Yaonan, LIU Dongqi. A study of mechanical and electrical compound braking force distribution strategy for electric vehicle [J]. Control engineering of China, 2014(3): 347?351.
[7] 吴普兴,滕青芳.混合动力电动汽车再生制动能量回收的研究[J].机械传动,2014(3):58?62.
WU Puxing, TENG Qingfang. Research of regenerative braking energy recovery of hybrid electric vehicle [J]. Journal of mechanical transmission, 2014(3): 58?62.
[8] 吴炎花.基于EHB的电动汽车电?液复合制动系统优化设计研究[D].南京:南京航空航天大学,2013.
WU Yanhua. Optimization design of electric vehicles with electro?hydraulic brake system based EHB [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013.
[9] 王龙.基于联合仿真的电动汽车电?液复合制动系统多目标优化设计研究[D].南京:南京航空航天大学,2014.
WANG Long. Research on multi?objective optimization design of EV electro?hydraulic composite braking system based on co?simulation [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014.
[10] 陈婕,熊盛武,林婉如.NSGA?Ⅱ算法的改进策略研究[J].计算机工程与应用,2011,47(19):42?45.
CHEN Jie, XIONG Shengwu, LIN Wanru. Improved strategies and researches of NSGA?Ⅱ algorithm [J]. Computer engineering and applications, 2011, 47(19): 42?45.
[11] AHMED A, CUI Shumei. Control and analysis of regenerative power distribution on electrical variable transmission using fuzzy logic on HEV system [C]// Proceedings of 2011 Electrical Machines and Systems. Piscataway: ACM, 2011: 1?6.
[12] 花庆荣,陈士杰.轿车制动感觉评估与制动感觉指数[J].上海汽车,2008(6):35?37.
HUA Qingrong, CHEN Shijie. Braking feel evaluation and braking feel index [J]. Shanghai automobile, 2008(6): 35?37.
猜你喜欢
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
大陆桥视野·下(2016年11期)2017-02-28
青春岁月(2016年22期)2016-12-23
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
科技视界(2016年4期)2016-02-22
现代经济信息(2016年1期)2016-01-25
中国高新技术企业(2015年16期)2015-04-30
电测与仪表(2014年24期)2014-04-09
