
水下通信中信号跟踪方法的抗干扰设计
2018-04-04 09:10陈林
现代电子技术 2018年7期
关键词:抗干扰
陈林
摘 要: 针对传统的水下通信信号跟踪方法根据点观测信息对当前信号状态实施预测,对数据信噪比较为敏感,存在较高的误码率和较低的抗噪性能,设计一种抗干扰性强的水下通信信号跟踪方法。通过分块的信道跟踪方法对实际信道进行实时跟踪,减缓时变对信道的冲击,在跟踪的信道中采用弱小目标信号的检测前跟踪方法,将原始数据作为观测数据,利用跟踪算法预计目标状态,再对目标状态进行检测判决,有利于低信号噪音在高信噪比条件下的能量积累,提高目标检测性能,实现高噪声水下环境中通信信号的准确跟踪。实验结果说明,所提方法能够准确跟踪水下通信信号,具有较低的误码率,抗噪性能高。
关键词: 水下通信; 信号跟踪; 抗干扰; 弱目标; 信道跟踪; 抗噪性能
中图分类号: TN911.4?34; TP391 文献标识码: A 文章编号: 1004?373X(2018)07?0012?04
Anti?jamming design of signal tracking method in underwater communication
CHEN Lin
(School of Information Engineering, Suqian College, Suqian 223800, China)
Abstract: The traditional tracking method of underwater communication signal used to predict the current signal status according to the point observation information is sensitive to data SNR, and has high bit error rate and low anti?noise performance. Therefore, an underwater communication signal tracking method with high anti?jamming performance was designed. The channel tracking method based on block is used to track the practical channel in real time, and reduce the time?varying impact on channel. The tracking method of weak target signal before detection is adopted in tracking channel. The original data is taken as the observation data to predict the target state by means of the tracking algorithm, and then detect and judge the target state, which are conducive to the energy accumulation of low?noise signal under high SNR condition, can improve the target detection performance, and realize the accurate tracking of communication signal in the underwater environments with high SNR. The experimental results show that the method can track the underwater communication signal accurately, and has low bit error rate and high anti?noise performance.
Keywords: underwater communication; signal tracking; anti?jamming; weak target; channel tracking; anti?noise performance
0 引 言
随着信息通信技术的快速发展,水下通信网络目标跟踪技术广泛应用在军事、检测等领域。水下通信网络受到环境复杂性的干扰,当前的跟踪方法抗干扰性较差,该课题成为相关学者研究的重点。
以分布式卡尔曼滤波算法为基础的水下通信信号跟踪方法,通过设置检测数据的门限,采集点观测信息,再基于点观测信息对当前信号状态实施跟踪。该方法对传感器获取的检测数据信噪比较为敏感,不能解决实际水下通信中的复杂环境中高信噪比的干扰,存在较高的误码率和较低的抗噪性能。因此,本文设计了新的水下通信信号跟踪方法,提高信号跟踪的抗噪性,实现水下通信信号的准确跟踪。
1 水下通信中信号跟踪方法的抗干扰设计
1.1 水下通信中信道的准确选取
水下通信中信道的时变性较显著时,信道的估计值与实际值的差别较大。在水下通信中信道的时变是可控的,信道的变化是连续的过程,通过对实际信道进行选取[1],实现减缓时变对信道的冲击,进而为后续信道中信号的准确跟踪提供好的环境。在海洋水声环境中可采用分块选取法对某个连续时间的信道冲击进行修正,将整个数据块分为多个小的子块。因为信道的变化是连续的,所以当子块足够多时,可认为信道的冲击是非时变的。这种分块信道选取方法的基本思想是:当前子块均衡时的冲击为上个子块的信道冲击的估计值,子块结束均衡恢复出信号后,利用均衡信号重新估计当前信道的冲击。按照这种思想处理后续的所有子块。
基于分块的信道选取需要将长为[N]的数据分为若干小的子块,假设子块的数据长度为[Ns,]为留存当前子块对下一子块的码间干扰,可在子块的尾端附加长度为[Ntoil]的数据,为了能保留完整的码间干扰[2],需满足[Ns>Ntoil>L,][L]表示该信道的最大可辨识路径。图1为基于分块的信道选取数据帧的分割结构。
对水下通信的信号进行信道选取时,首先将上个子块对当前子块的码间干扰消除,然后对上个子块估计的冲击进行均衡控制[3],恢复当前子块的前[N]个数据,再将恢复的数据作为训练序列重新对当前信道进行冲击估计,并计算当前子块的拖尾干扰,方便下个子块数据的处理。
假设一个被分成[r]个子块的数据帧,对信道选取的过程如下:
1) 根据导频序列估计出初始信道的冲击为[h0,]计算出导频序列中第一个子块的码间干扰[d1]。
2) 计算第[t]个子块的数据块向量为:
假设第[t-1]个子块对第[t]个子块的码间干扰向量为:
当干扰被消除后,得到均衡的数据块向量:
[yt=y′t-dt] (3)
子块均衡前,视为其信道冲击响应等同于其上一子块的信道冲击响应[h′t-1,]输入[yt]和[ht-1,]进入频域均衡,输出时域信号[xt]。
3) 取时域信号[xt]的前[Ns]个数据作为判决,将其判决到最近的星座点,得到时域的判决向量[xt]。
4) 已知[xt]的序列,[yt]为接收序列,采用信道估算法对当前信道进行重新估计,结果用[ht]表示,对[xt]和[ht]进行卷积运算[4],得出当前子块对下个子块的码间干扰[dt+1]。
5) 重复过程2)直至将[r]个子块全部处理。
应用过程中,若均衡算法的应用对象是频域均衡,还要进行时域和频域的信号转换,在过程2)中对[yt]和[ht-1]向量进行DFT转换,过程4)在进行卷积运算前先将[Ns]点的DFT转换到频域相乘再做2[Ns]点的IDFT转换到时域,[Ns]点为码间干扰。
1.2 水下通信中干扰信号的跟踪方法设计
通过1.1节的分析过程实现了水下通信中信道的实时准确跟踪,在该信道中采用弱小目标的检测前跟踪方法,实现高噪声水下环境中通信信号的准确跟踪。
弱小目标的监测与跟踪问题包括水中追踪目标,隐秘性较高、目标偏小、噪声和杂波过强造成声呐回波弱[5]。本文提出水下通信中弱小目标的检测前跟踪法,将原始的观测数据作为观测数据,利用跟踪算法预计目标状态,再对目标状态进行检测判决,有利于低信号噪音在高信噪比条件下的能量积累,提高目标检测性能。图2为本文水下通信目标检测与跟踪中信号处理流程。
图2中各个小方块为本文信号跟踪方法步骤,外部的大方框表示信号检测跟踪各个步骤是同时进行的且不存在检测限制[6]。
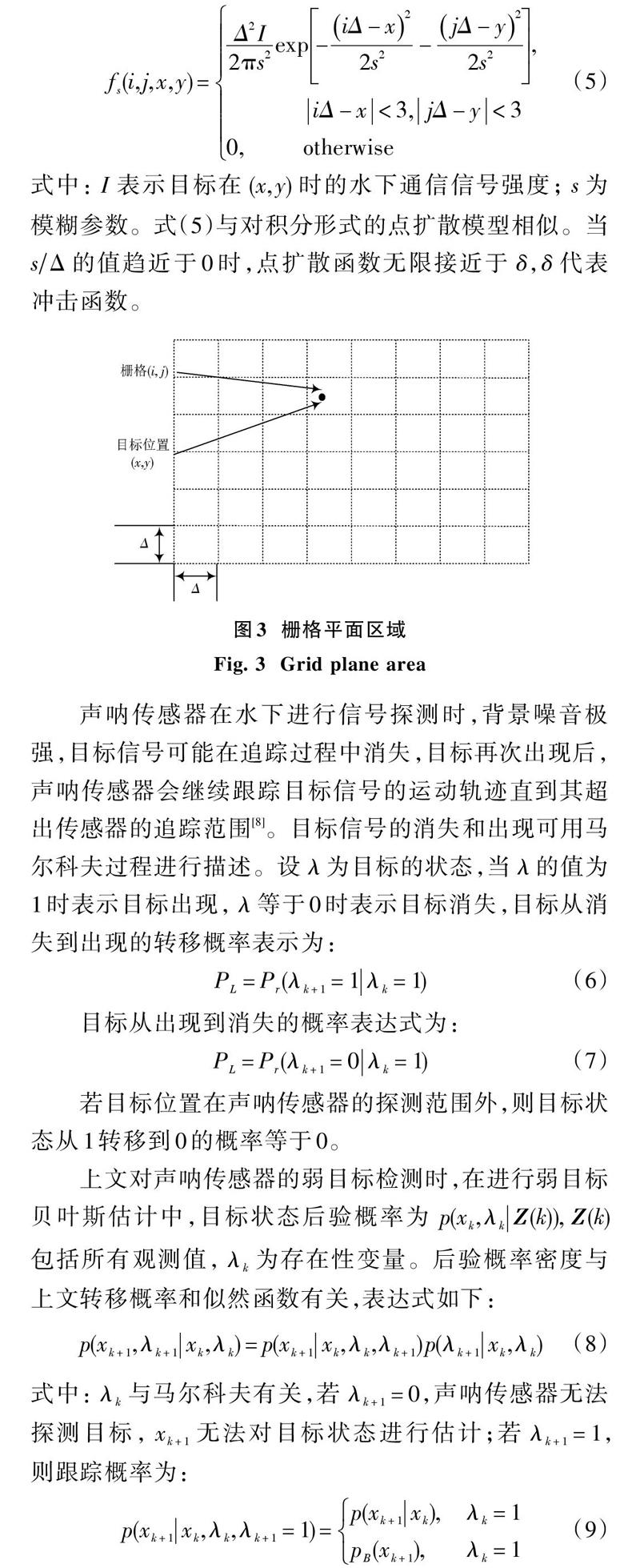
设置声呐传感器的探测区域是[X×Y]的平面区域,也就是栅格平面区域,如图3所示。根据声呐的灵敏度将探测区域分成[M×N]大小为[Δ×Δ]的分辨小块,假设在[k]时间内产生了[zij(k)]观测数据,[i=1,2,…,N;j=1,2,…,M,]得出[k]时间内声呐传感器的全部观测向量为:
[Z(k)=zij(k):i=1,2,…,N;j=1,2,…,M] (4)
若目标位置在平面区域的中心,该目标会对周围的区域带来影响。假设该目标对[(i,j)]的分辨小块的影响为[fs(i,j,x,y)],若该目标为点目标,可以采用扩散函数表示该点对周围区域的影响[7],扩散函数通常用二维截断圆对称高斯模型表示。
[fs(i,j,x,y)=Δ2I2πs2exp-iΔ-x22s2-jΔ-y22s2, iΔ-x<3,jΔ-y<30, otherwise] (5)
式中:[I]表示目标在[(x,y)]时的水下通信信号强度;[s]为模糊参数。式(5)与对积分形式的点扩散模型相似。当[sΔ]的值趋近于0时,点扩散函数无限接近于[δ,][δ]代表冲击函数。
聲呐传感器在水下进行信号探测时,背景噪音极强,目标信号可能在追踪过程中消失,目标再次出现后,声呐传感器会继续跟踪目标信号的运动轨迹直到其超出传感器的追踪范围[8]。目标信号的消失和出现可用马尔科夫过程进行描述。设[λ]为目标的状态,当[λ]的值为1时表示目标出现,[λ]等于0时表示目标消失,目标从消失到出现的转移概率表示为:
目标从出现到消失的概率表达式为:
若目标位置在声呐传感器的探测范围外,则目标状态从1转移到0的概率等于0。
上文对声呐传感器的弱目标检测时,在进行弱目标贝叶斯估计中,目标状态后验概率为[p(xk,λkZ(k)),][Z(k)]包括所有观测值,[λk]为存在性变量。后验概率密度与上文转移概率和似然函数有关,表达式如下:
式中:[λk]与马尔科夫有关,若[λk+1=0,]声呐传感器无法探测目标,[xk+1]无法对目标状态进行估计;若[λk+1=1,]则跟踪概率为:
[p(xk+1xk,λk,λk+1=1)=p(xk+1xk),λk=1pB(xk+1),λk=1] (9)
式中:[p(xk+1xk)]为状态概率转移密度;[pB?]为目标首次出现的概率。
2 实验结果与分析
2.1 跟踪结果检测
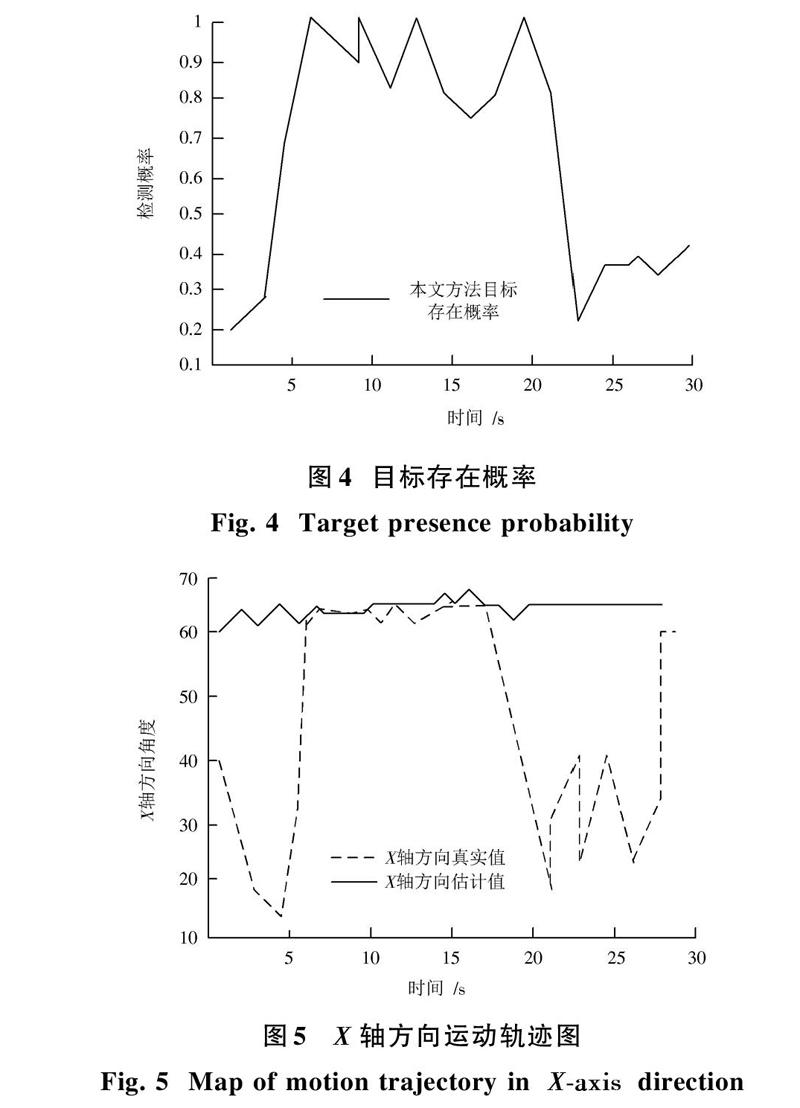
实验设置采样时间间隔为1 s,待检测的水下通信栅格范围[9]是100×100,水下通信信号强度[I=20,]实验中的噪声为高斯白噪声,其标准差为10,方差为[0.0052,]当目标信号在5~20 s出现[10]时,算出目标出现的概率为0.2,消失概率为0.2。初始状态[x=63,0,0.2,0r,]采用本文方法对实验水下通信中的信号进行跟踪仿真实验,效果图如图4,图5所示。
分析图4可知,在5~20 s时,水下通信目标出现,此时目标出现的概率大于0.6,在其他时刻目标出现的概率急速下降。分析图5水下通信信号在[X]轴方向运动轨迹图能够看出,当水下通信目标的出现概率大于0.6时,检测到本文方法跟踪的信号[X]轴运动轨迹与信号真实的[X]轴运动轨迹差别不大;当概率小于0.6时,运动轨迹差别较大,其同图4中的实际结果一致,说明本文方法是一种有效的水下通信信号目标跟踪方法。
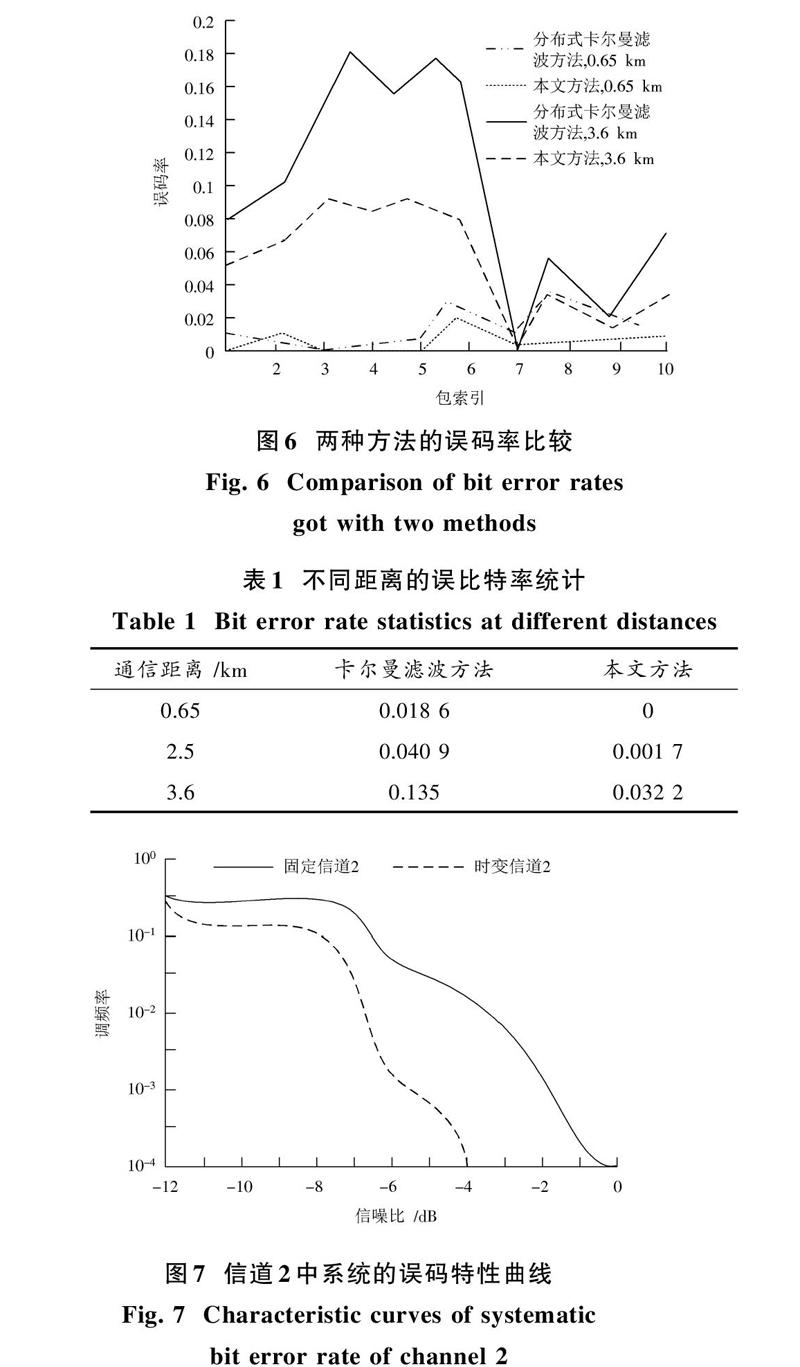
2.2 误码率检测
实验采用本文方法对某沿海地区海域进行实验分析,利用本文方法对信道进行预估,在信号发射端输入文本信息,接收数据的同时采用卡尔曼滤波方法和本文方法对均匀分布的数据信息进行预估,得到如图6所示的两种方法的误码率性能图。发射端发射信号后,在接收端采用两种方法进行调节,得到如表1所示的不同距离接收到数据处理后的误比特率统计情况。
2.3 时变信道中通信性能检测
实际应用中水中的信道大多为时变信道,对时变信道的分析需采用水声时变信道模型,上文介绍了采用比较简单的方法构建水声信道模型,在一定程度上可以体现水声信道的时变性,利用该模型和接收系统进行性能仿真分析,仿真环境为:载波频率[fc=]4 000 Hz,利用QPSK进行信号调节,码元速率为400 SPS,为了提供每条信道的多径叠加随机时延,采样频率为[fs=64×fc,][Kf1=0.01,][Kf2=0.0110,][λ=0.99,]图7为本文方法下信道处于时变信道2时的误码特性曲线,为了得到强烈的对比结果,给出相同条件下工作在时不变信道2的误码特征曲线。由图7得出信号处于时变信道2时,性能相比时不变信道2时下降了4 dB左右。通过对仿真实验结果进行分析得出结论:信号处于时变信道时,性能稍有下降,但当输入的信噪比较大时,就可进行正常的信号追踪。应用时变信道模型时应根据实际情况加以利用,说明本文方法可以降低一些由信道带来的随机时变相位起伏和幅度起伏功能,具有较高的抗噪性能。
3 结 论
本文提出新的水下通信中信号跟踪方法,采用分块的信道跟踪方法对实际信道进行实时跟踪,有效处理了时变对信道的冲击,并通过弱小目标的检测前跟踪方法实现水下复杂环境中通信信号的准确跟踪。
参考文献
[1] 郭阳勇.水下军事通信中短距离通信优化方法研究[J].计算机仿真,2014,31(7):10?13.
GUO Yangyong. Short distance communication optimization method in underwater military communication [J]. Computer simulation, 2014, 31(7): 10?13.
[2] 朱静.实时信号检测在水下信号识别中的研究及系统仿真[J].舰船科学技术,2015,37(5):155?158.
ZHU Jing. Research of real time signal detection in underwater signal identification and system simulation [J]. Ship science and technology, 2015, 37(5): 155?158.
[3] 万磊,张英浩,孙玉山,等.基于自抗扰的自主水下航行器地形跟踪控制[J].兵工学报,2015,36(10):1943?1948.
WAN Lei, ZHANG Yinghao, SUN Yushan, et al. AUV′s bottom following control method based on ADRC [J]. Acta armamentarii, 2015, 36(10): 1943?1948.
[4] 赵利芳,荆丽丽.大型无人机电子通讯信号抗干扰方法研究仿真[J].科技通报,2015,31(12):218?219.
ZHAO Lifang, JING Lili. Large UAV electronic communication signal anti?jamming method study and simulation [J]. Bulletin of science and technology, 2015, 31(12): 218?219.
[5] 丁雪芳.大型网络通信系统干扰下的稳定性控制模型仿真[J].控制工程,2015,22(6):1161?1165.
DING Xuefang. Simulation of stability control model under disturbance of large scale network communication system [J]. Control engineering of China, 2015, 22(6): 1161?1165.
[6] 闫云斌,田庆民,马晓琳,等.跳频信号与跟踪干扰信号DOA估计方法[J].海军工程大学学报,2016,28(1):108?112.
YAN Yunbin, TIAN Qingmin, MA Xiaolin, et al. DOA estimation methods of FH signals and follower jamming signals [J]. Journal of Naval University of Engineering, 2016, 28(1): 108?112.
[7] 沈晓燕,杜薇,洪波.控制后肢运动的脊髓神经信号追踪方法研究[J].高技术通讯,2015,25(4):393?396.
SHEN Xiaoyan, DU Wei, HONG Bo. A study on tracking the neural signals for hindlimb movement control in the spinal cord [J]. Chinese high technology letters, 2015, 25(4): 393?396.
[8] 杨学永,宋国栋,钱轶,等.现代雷达信號分选跟踪的几种方法[J].现代雷达,2014,36(3):43?48.
YANG Xueyong, SONG Guodong, QIAN Yi, et al. Several methods of radar signal sorting and tracking [J]. Modern radar, 2014, 36(3): 43?48.
[9] 马月红,于志坚,张晓林,等.一种极低载噪比高动态信号跟踪的线性预测器设计[J].宇航学报,2015,36(9):1068?1074.
MA Yuehong, YU Zhijian, ZHANG Xiaolin, et al. The design of an adaptive linear predictor for the tracking of extremely low?CNR high?dynamic signals [J]. Journal of astronautics, 2015, 36(9): 1068?1074.
[10] 赵文礼,范剑,吴敏,等.微弱信号混沌检测的自跟踪扫频控制方法[J].控制理论与应用,2014,31(2):250?255.
ZHAO Wenli, FAN Jian, WU Min, et al. Self?tracing?frequency control in weak signal chaotic detection [J]. Control theory & applications, 2014, 31(2): 250?255.
猜你喜欢
卷宗(2016年10期)2017-01-21
科技视界(2016年18期)2016-11-03
经营者(2016年12期)2016-10-21
科技视界(2016年17期)2016-07-15
科技视界(2016年13期)2016-06-13
科技视界(2015年25期)2015-09-01
