
基于可拓控制的感应电机节能滑模控制器的研究
2018-04-04 05:01陶国彬李道成刘幸幸任万程乔永娜东北石油大学电气信息工程学院黑龙江大庆163318
电气自动化 2018年1期
陶国彬, 李道成, 刘幸幸, 任万程, 乔永娜(东北石油大学 电气信息工程学院,黑龙江 大庆 163318)
0 引 言
对于新的应用领域及可替换电机来说,节能电机也许是一个正确的选择。电机效率的提升使其价格变得更高(大约5%的高效率集中在高档电机)。在纺织厂和制糖工业中重绕电机占比可能超过50%。由于重绕热处理的应用以及绕组老化导致电动机效率降低。此外,气隙的变化也会影响输出转矩和功率因数。在交流驱动中通过降低电压波动也可以实现节能,因为波动电压会导致能量额外的损失。例如一个完全稳定的三相2 kW的电机会消耗2 300 W的电能。同样的电机消耗2 800 W并且在A相电压有30%的压降。与稳定的供电相比,电压波动产生的损失会更高[1]。这种波动会导致线圈变热和负序电流的产生,这可以通过增加交流驱动避免。
1 感应电机数学模型
为了分析系统性能,系统的各种硬件部分应该用数学模型描述。交流电机的动态模型很复杂,因为三相转子绕组随着定子绕组运动。为了简化模型,模型应该用一个等效的两相d-q模型表示。基于AC-to-AC系统的智能功率模块(IPM)被认为是理想化的,逆变器输入端的直流电压没有交流分量,逆变器的输出端没有谐波[2]。在定子坐标系下的感应电机模型如下:
(1)
(2)
(3)
式中:ω为实际转速;Ψa、Ψb为转子通量;Μ为互感;ia、ib为定子电流;Lrot为转子电感。
2 提出的方法
感应电机因其坚固的结构和不需维护的运行特性是全球工业应用的首选。在额定转矩和额定转速(满载条件)下感应电机以最大效率运行。然而,在非满载的情况下感应电机由于在可变损耗(铜耗)和不变损耗(铁耗)之间的不平衡会导致效率下降。这促使了一些基于标量和矢量控制的效率改进方法的发展。
该系统包括前端整流器,后接一个逆变器,如图1所示。逆变器由Powerex Intellimod PM50L1A120制造。这个设备由栅极驱动,IGBT,续流二极管和保护电路组成。中间直流回路电压维持在700 V,在这个级别任何明显的增加都可以通过制动IGBT控制。

图1 系统框图
可拓控制器包含滑模控制(SMC),它会接收一个采样速度误差的向量来评估参考转矩。它的功能是基于传统磁场定向控制对滑模控制进行系统识别。可拓控制器为了以下几个重要功能而被调整:提供反馈、消除稳态误差。为了实现感应电机驱动器的转矩控制,在启动期间使用可拓控制器克服了超调,将稳态误差降到最低。
3 基于可拓控制的滑模控制器
滑模控制器的运行涉及到控制信号的快速转换,这样就导致了震颤的发生。震颤是指在滑动面周围的系统轨迹线不必要的快速振荡[3]。数字电路的取样过程也可以造成震颤现象。这是由于在任何两个采样瞬间系统都是开放循环的。
基于可拓控制的滑模控制器的设计原理与步骤和可拓控制器类似,有两点不同:一是由于可拓变换的准则不同,由此产生可拓变换后经典域与可拓域的不同;二是在经典域中采用的控制策略有所差异[4]。
首先对经典域进行可拓扩大变换,引起矛盾问题的转换,由最初的能否满足控制指标变换为是否能由可拓智能控制算法取得良好的控制效果[5-9]。
为了解决这一矛盾,可对经典域采用可拓扩大变换:
(4)
即:
(5)

(6)
这种可拓集合的建立方式体现的矛盾双方即为能否用滑膜控制策略可以取得良好控制效果[10],程序框图如图2所示。
可拓集合建立之后就可以按照相同的方法构造关联度函数、求解关联度、确定测度模式,最终基于可拓控制的滑模控制器的算法为[11]:
(7)
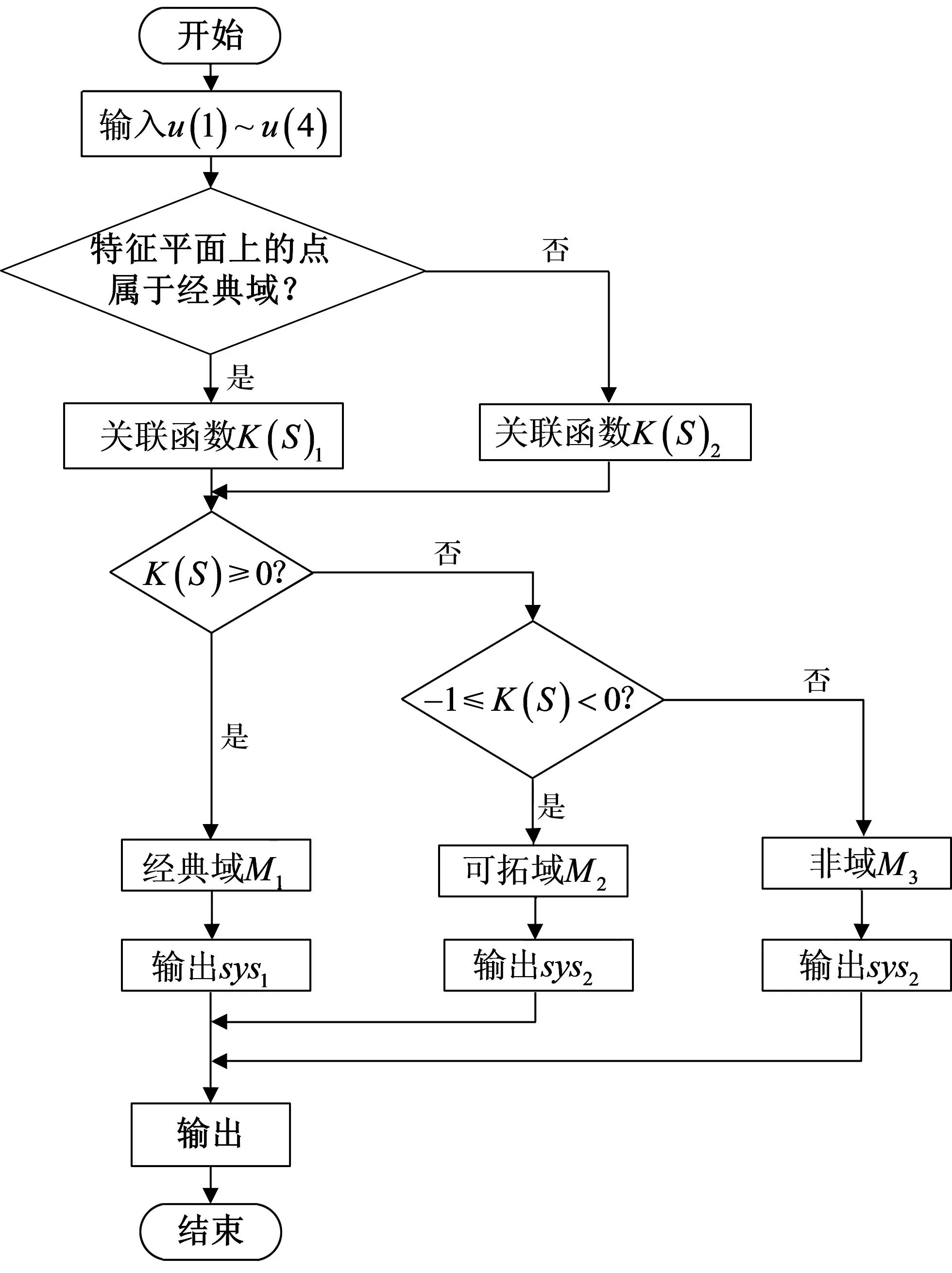
图2 可拓控制的算法流程图
4 结果和分析
为了验证本文所提出的控制策略的有效性,采用MATLAB/Simulink的对算法进行模拟仿真。
4.1 满载
查看以下参数仿真结果:转速(ω)、转矩(T),如图3所示。

图3 满载情况下各参数的仿真波形
从速度响应可以看出,可拓控制器以更少的超调和静态误差提供了一个良好的跟踪性能。
4.2 部分负荷(非满载)
非满载条件下的效率改进如图4所示。电机负载在时间t= 1 s时,从148 N·m的满载值降到70 N·m。每两秒循环采样系统的负载变化。
4.3 鲁棒性测试
鲁棒性测试是通过改变定子、转子的电阻和电感测试电机的性能。这将表示在高温条件下连续运行过热的实际情况。仿真结果如图5所示。可以观察到,即使参数变化速度依然稳定。
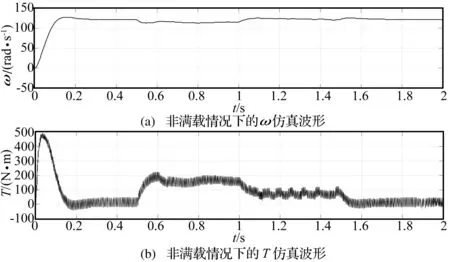
图4 非满载情况下各参数的仿真波形
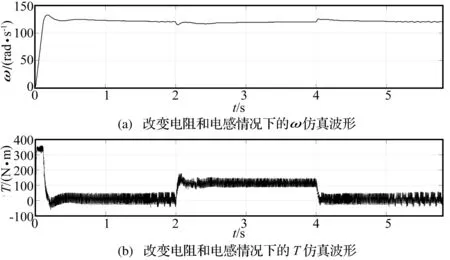
图5 改变电阻和电感情况下各参数的仿真波形
5 结束语
本文研究了可拓智能控制器在部分负载的情况下使电机以最大效率运行的方法。该方案可以在工业应用中提供节能。该方法的主要亮点是完全消除传统的比例-积分控制器或比例-积分-微分控制器的计算负担。部分负载的电机效率在转矩没有任何扰动的情况下可提高7% 到10%。
参考文献:
[ 1 ] 于彪. 圆网印花机可拓智能同步控制策略的可行性研究[D]. 苏州: 苏州大学, 2012.
[ 2 ] 王宏. 异步电机的变频器节能控制运行研究[J]. 山东工业技术, 2016,35(10): 77-78.
[ 3 ] 于彪, 朱翚. 双电机可拓模糊PID同步控制策略的研究[J]. 上海电气技术, 2012,5(1):9.
[ 4 ] 宋海良, 唐勇奇, 董明, 等. 基于等效滑膜控制的永磁同步电机矢量控制[J]. 湖南工程学院学报(自然科学版), 2013, 23(4): 5-8.
[ 5 ] 徐燕, 杨跃农. 异步电机相控优化节能控制技术分析[J]. 电机与控制应用, 2012, 39(11): 43-46.
[ 6 ] 郭玮嘉, 孟凡毅. 基于 DSP 的三相异步电机节能控制技术研究[J]. 电子设计工程, 2012, 20(15): 159-161.
[ 7 ] KUMAR R S, GANAPATHY V. Implementation of a sliding mode controller trained ANN for energy conservation in induction motor[J]. International Journal of Control and Automation, 2016, 9(7): 221-234.
[ 8 ] MEMON A J, SHAIKH M M. Confidence bounds for energy conservation in electric motors: An economical solution using statistical techniques[J]. Energy, 2016(109):592-601.
[ 9 ] WINSTON D P, SARAVANAN M. Novel energy conservation scheme for three phase induction motor drives employed in constant speed applications[J]. Przeglad Elektrotechniczny, 2012, 88(11): 243-247.
[10] HAISEN Z, BO W, YILONG W. Research on sectionalized energy-saving control strategy based on frequency and voltage regulator technique for induction motor with potential loads[J]. Proceedings of the CSEE, 2015, 35(6): 1490-1497.
[11] 郭玮嘉, 孟凡毅. 基于 DSP 的三相异步电机节能控制技术研究[J]. 电子设计工程, 2012, 20(15): 159-161.
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
哈尔滨铁道科技(2020年4期)2020-07-22
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
组合机床与自动化加工技术(2014年10期)2014-03-01
