一种基于掩星测量的月球探测器自主天文导航方法
2018-04-02 02:04:49周姜滨禹春梅马卫华
航天控制 2018年1期
周姜滨 禹春梅 马卫华
1.北京航天自动控制研究所,北京100854 2.航天飞行动力学技术重点实验室,西安 710072 3.西北工业大学,西安 710072
近年来,随着深空探测特别是月球探测的不断发展和深入,对自主导航技术的精度要求也越来越高。天文导航由于其量测信息是利用星敏感器量测的星光、太阳或行星星矢等,具有误差不随时间累积、抗干扰能力强、可靠性高、自主性强及成本低的特点。然而这些传统天文导航方法通常使用角度观测量来实现自主导航,往往受到星敏感器测角精度的约束或其他模型精度的影响,难以有效提高定位精度,只能达到公里甚至数百公里的量级[1]。
掩星是指空间中原本2个直视可见的星体,被其他星体或物质所掩盖,导致一个星体发射的电波信号不能直接到达另一个星体[2]。该现象被广泛应用于近地大气观测,借助特定卫星电波信号被地球大气所遮掩,经过地球大气和电离层折射后到达观测卫星的现象,可用于观测反演大气温度、密度、气压和电离层电子密度剖面,对于天气学、气候学和空间天气学一级测地学具有重要意义[3],并引起对掩星大气探测星座的关注[4-5]。
同样掩星观测方法作为天文学中用来精确测量天体位置、空间取向和表面形状的一种重要手段,同样在天文导航中发挥着重要作用。
不同于常规天文导航处理方法,掩星导航的量测信息为某颗恒星被行星或卫星遮挡或从遮挡状态中再现的时刻,或者说在星敏感器视场中心附近,被掩恒星亮度信息从有到无或从无到有的事件发生时刻[6-7]。因此,对星敏感器测角精度要求相对较低,观测仪器简便、成本更低,但量测精度更高,更能有效提高导航精度[8]。考虑到大气会对星体测量产生折射现象,导致测量精度降低,所以基于无大气或稀薄大气包裹的星球进行观测的掩星导航会有较好的应用前景[9]。
以月球探测器为应用对象,对掩星天文导航原理和方法开展了研究,包括掩星天文导航原理与数学模型、掩星天象预测方法和掩星天文导航数学仿真分析等几个方面,并对相应研究工作和成果进行了叙述。
1 掩星导航原理与数学模型
掩星是指某颗恒星被行星或卫星遮挡或从遮挡状态中再现的现象,图1描述了空间飞行器对于某颗恒星的月球掩星现象,其中P1点为被月球遮挡的掩星现象,P2点为从遮挡状态中再现的掩星现象。掩星导航则是通过对掩星现象序列的观测来确定空间飞行器的位置和速度,属于自主导航范畴。
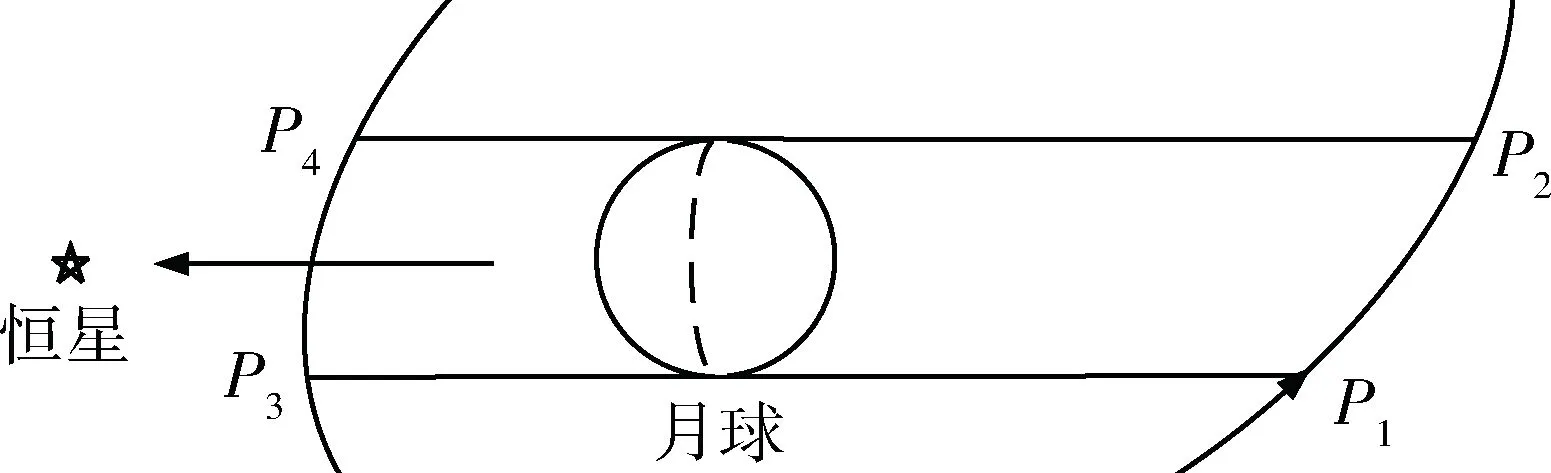
图1 掩星现象示意图
掩星导航的基本测量信息是出现掩星现象的时间,可以利用星敏感器进行测量。如果某颗恒星在星敏感器视场内突然消失,而不是从视场边缘消失,那么该恒星消失时刻发生了掩星现象,星敏感器输出这一时刻的时间以及相应的恒星编号;同样,如果某颗恒星在星敏感器视场内突然出现,而不是从视场边缘出现,那么该恒星出现时刻发生了掩星现象,星敏感器输出这一时刻的时间及相应的恒星编号。
以月球探测器为研究对象,为了简化问题,将月球探测器所受到的月球非球形引力、地球引力、太阳引力以及太阳光压等看作摄动项,可写出月球探测器的动力学模型为
(1)

导航的目的是确定载体的位置和速度,若能够得到载体的概略位置和速度矢量及其偏差即可确定其准确的位置和速度,月球探测器的概略位置和速度矢量可以根据动力学模型从初始位置和速度积分得到,概略位置和速度矢量的偏差则可以利用掩星观测信息估计得到。
根据月球探测器的动力学模型,可以得到月球探测器的位置和速度偏差的传播特性方程
(2)

考虑到在月球探测器的动力学模型中时间是一个独立变量,时间观测量在最优估计过程中比较难以处理,因此,掩星导航的一个关键点就是如何对时
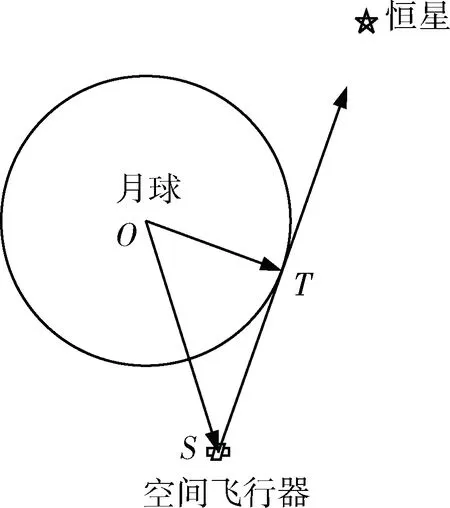
图2 掩星导航原理
间观测量进行适当的处理和转化。在本文的研究中,把掩星现象的时间观测量转化为沿着恒星星光方向上的最低高度。
在月球探测器上观测到掩星现象时刻,月球探测器、月球和恒星之间的关系如图2所示,其中OT即为沿着恒星星光方向上的最低高度。鉴于恒星距离足够远,可以认为在月球轨道附近区域恒星位于星空的同一位置;同时假设月球为一个球体。基于以上假设条件,取恒星星光方向上的最低高度偏差为观测量,可建立如下观测模型
可以写出线性化的观测模型为
(3)
其中,rL为月球平均半径;uSj为出现掩星现象的第j颗恒星的星光矢量方向单位矢量;δrL为月球地形起伏,将δrL建模为高斯白噪声。
卡尔曼滤波是一种常用且有效的最优估计方法,并在工程中得到了成功应用,本文采用卡尔曼滤波器对掩星观测信息进行融合处理,实现掩星自主天文导航。离散卡尔曼滤波算法公式见文献[10]。
考虑到掩星现象出现周期的不确定性,在掩星自主天文导航计算过程中将选择固定的滤波周期T=tk-tk-1,而掩星现象出现在时刻t∈[tk-1,tk],需要插值计算出掩星现象出现时刻月球探测器的位置和速度:
r=(1-3τ2+2τ3)rk-1+(3τ2-2τ3)rk+
(τ-2τ2+τ3)Tvk-1+(-τ2+τ3)Tvk
(4)
v=(-6τ+6τ2)rk-1/T+(6τ-6τ2)rk/T+
(1-4τ+3τ2)vk-1+(-2τ+3τ2)vk
(5)

若令
r=a1rk-1+a2rk+a3vk-1+a4vk
(6)
则出现掩星现象的第j颗恒星对应的观测方程有

(7)
2 掩星天象预测方法
在掩星自主天文导航过程中,需要对掩星现象进行预测,以便及时对掩星现象进行测量,进而完成掩星导航。
定义星光矢量与轨道坐标系z轴的夹角为α,x轴到星光矢量在轨道平面投影的角为β,则星光矢量在轨道坐标系中的表达式为
月球探测器在轨道坐标系中的位置矢量为


(8)
其中,rL为月球平均半径;f为轨道真近点角;e为轨道偏心率;a为轨道半长轴。
相应的一阶导数为

(9)
利用以上两式采用牛顿迭代即可预测出指定恒星出现掩星现象的轨道真近点角以及对应的时间。
值得注意的是,对于指定恒星而言,上述方程解的情况大致可以分为2类:有4个解和无解。其中,无解意味着该恒星对于月球探测器不会出月球现掩星现象;有4个解的情况会出现2次掩星现象,即有2个增根,这2个增根需要通过验算进行甄别,若r·uS>0为增根,应舍去,如图1所示,P3和P4为增根。

3 数学仿真与分析
为了验证掩星自主天文导航方案的可行性和正确性,以及自主天文导航精度,开展了相关的数学仿真验证工作。
在仿真中,假设月球探测器运行在轨道高度为200km的圆轨道上,太阳处在月心惯性坐标系的正x轴方向;星敏感器对星光矢量的测量精度为60′′,对掩星现象时刻的测量精度为10ms;陀螺零次项误差为0.1(°)/s;月球地形的精度为100m;月球引力模型的精度为1.0×10-4m/s2。
针对5等以上的1710颗恒星,对月球探测器观察到的掩星现象进行预测。计算结果表明,考虑太阳的影响,在每个轨道周期内共观察到1542次掩星现象。图3给出了5个轨道周期发生掩星现象的情况,横坐标表示时间,单位为轨道周期数,纵坐标为观察到掩星现象对应的恒星编号。

图3 掩星现象预测结果
根据仿真条件和参数,对月球探测器自主天文导航方法进行100次数学仿真,单次仿真时间为36000s(约5个轨道周期),相应的仿真结果如图4~6所示。从仿真结果可以看出,在本报告的仿真假设条件下,自主天文导航方法的三轴位置精度优于100m,三轴速度精度优于0.1m/s。

图4 掩星导航x向位置和速度误差曲线
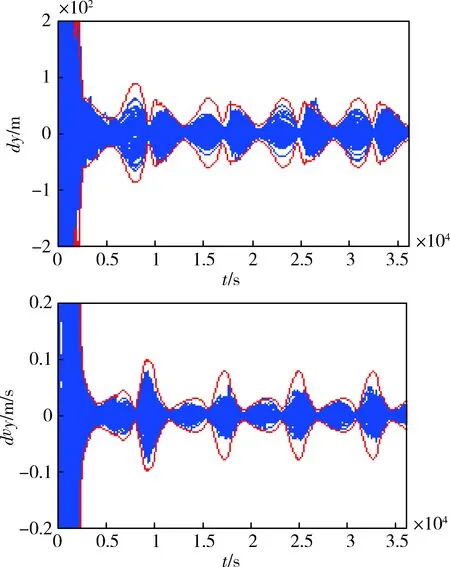
图5 掩星导航y向位置和速度误差曲线
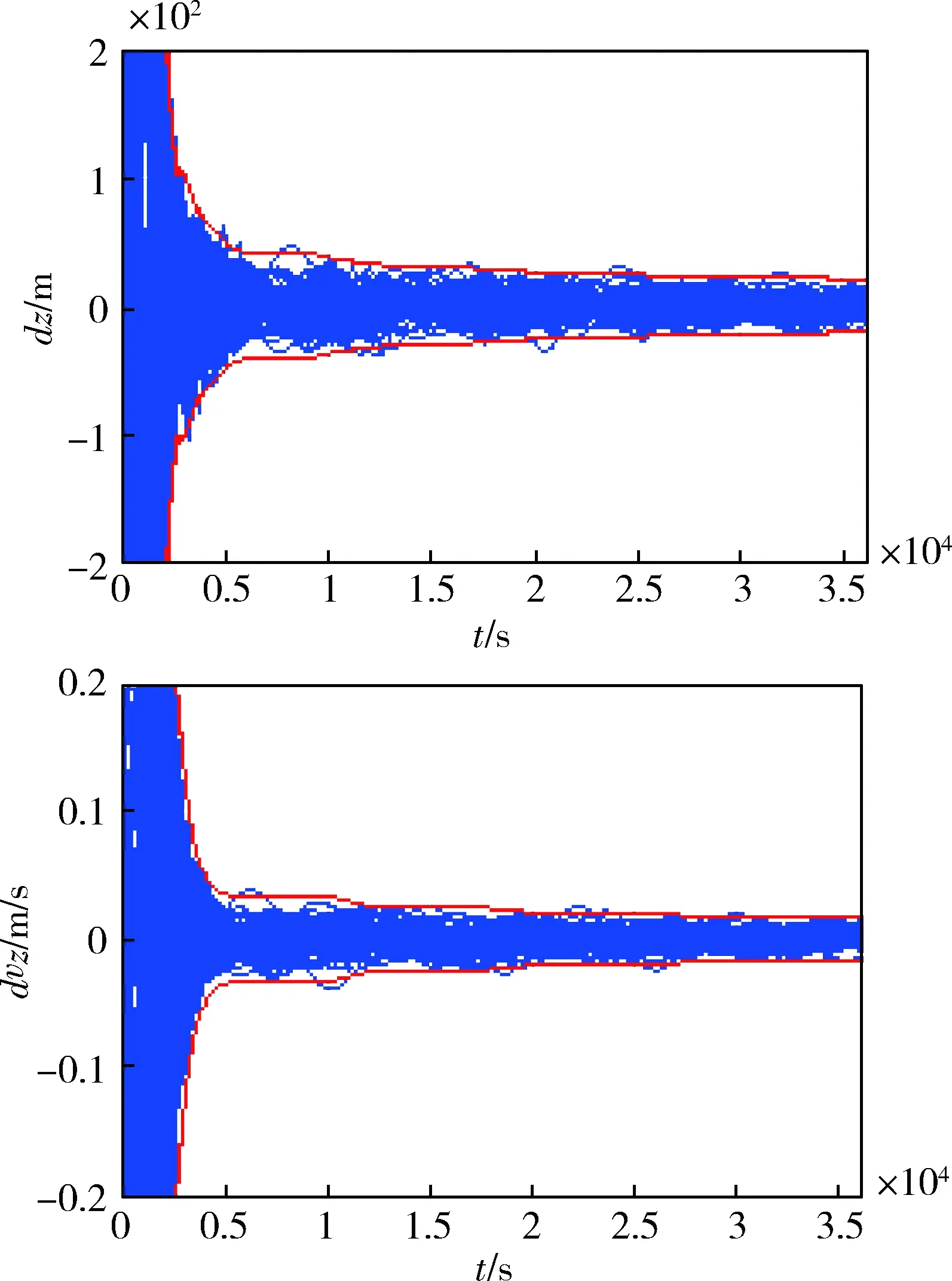
图6 掩星导航z向位置和速度误差曲线
4 结论
针对月球探测器自主导航定位问题,研究了掩星天文导航原理和方法。利用星敏感器掩星现象发生的时刻,将时间信息转化为位置信息,结合月球探测器的动力学模型,采用卡尔曼滤波器实现掩星自主天文导航。同时推导了掩星现象的预测算法,开展了相关的数学仿真验证工作。仿真结果表明月球探测器掩星自主天文导航原理可行,星敏感器对星光矢量的测量精度为60′′,对掩星现象时刻的测量精度为10ms时,三轴位置精度优于100m,三轴速度精度优于0.1m/s。
[1] 房建成, 宁晓琳, 田玉龙. 航天器自主天文导航原理与方法[M]. 北京: 国防工业出版社, 2006.
[2] GPS掩星[EB/OL]. https://baike.baidu.com/item/GPS%E6%8E%A9%E6%98%9F/16604987.
[3] 胡雄, 曾桢, 张训械,等. 大气GPS掩星观测反演方法[J]. 地球物理学报, 2005, 48(4):768-774.(Hu Xiong,Zeng Zhen,Zhang Xunxie,et al. Atmospheric Inversion Methods of GPS Radio Occultation[J]. Chinese Journal of Geophysics, 2005, 48(4):768-774.)
[4] 陈志平,罗佳,肖晓,等. COSMIC掩星反演的水汽廓线质量分析[J]. 国防科技大学学报, 2017,39(3):201-206.(Chen Zhiping, Luo Jia, Xiao Xiao, et al. Assessment of COSMIC Radio Occultation Water Vapor Profile[J]. Journal of National University of Defense Technology, 2017, 39(3): 201-206.)
[5] 梁斌,王珏瑶,李成魏,等. 多GNSS掩星大气探测卫星星座设计[J]. 宇航学报. 2016,37(3):334-340.(Liang Bin, Wang Jueyao, Li Chengwei, et al. Design of Multi-GNSS Occultation Sounding Satellite Constellation, Journal of Astronautics, 2016, 37(3):334-340.)
[6] Mark L. Psiaki and Joanna C. Hinks, Autonomous Lunar Orbit Determination Using Star Occultation Measurements[J], AIAA 2007-6657.
[7] Sun Hur-Diaz, Bill Bamford, Dave Gaylor. Autonomous Lunar Orbit Navigation Using Optical Sensors[J]. AAS 07-312.
[8] John A. Christian and E. Glenn Lightsey, Review of Options for Autonomous Cislunar Navigation[J]. Journal of Spacecraft And Rockets. 2009, 46(5):1023-1039.
[9] Amin Ali Mody. Autonomous Navigation: Optical State Acquisition Systems For Lunar And Interplanetary Small Satellites[J]. IAC-16-B4.8.4, 2016, Mexcio.
[10] 秦永元, 张洪钺, 汪书华. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出版社, 1998.
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:08:34
空间科学学报(2022年3期)2022-06-20 09:04:20
空间科学学报(2021年4期)2021-08-30 08:31:14
小学阅读指南·低年级版(2021年5期)2021-05-28 15:12:15
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:24
空间科学学报(2020年6期)2020-07-21 05:36:46
百科探秘·航空航天(2018年12期)2018-12-29 03:57:56
奥秘(2018年10期)2018-10-25 05:38:56
学生天地(2016年31期)2016-04-16 05:16:00
百科探秘·航空航天(2015年10期)2015-11-07 07:05:15