
步进伺服电机综合实训装置
2018-04-02 07:17覃贵礼黄月英
装备制造技术 2018年1期
覃贵礼,黄月英
(广西职业技术学院,广西 南宁530226)
1 步进伺服电机综合实训装置设计要求
(1)该步进伺服电机实训装置集电气控制、PLC、步进、伺服、变频、传感和组态等为一体的综合实训装置[1]。
(2)学生可根据实训任务要求,自行完成系统方案设计、接线、编程和整体调试的过程,全面掌握机电一体化技术综合实训。
(3)该实训装置要以机电类相关专业核心课程相对接,可单独或者综合实训。
(4)该实训装置除可完成学生相关实训外,同时可为教师科研提供开发平台。
2 步进伺服电机综合实训装置结构说明
实训装置是在铝合金底板上装有输送装置、加工装置和辅助控制装置。输送装置、加工装置通过电缆和气源管与辅助控制装置连接。输送装置包含电机、皮带、推料气缸、夹料气缸、工作台及检测传感器。加工装置包含立柱、摇臂、主轴箱、主轴、位置检测传感器、加工机器固定槽。辅助控制装置包含指示灯组、按钮、变频器、交流伺服驱动器、步进电机驱动器、电源组、气缸组、电磁阀组、PLC控制器。本实用新型装置将机电类专业学生所学的电机、控制、气动、检测等知识有机融合;实训装置为开放式,实训内容丰富,根据教学实训要求,学生可以按自己的思路安装、接线、调整、调试完成实训任务,实训装置如图1和图2所示。
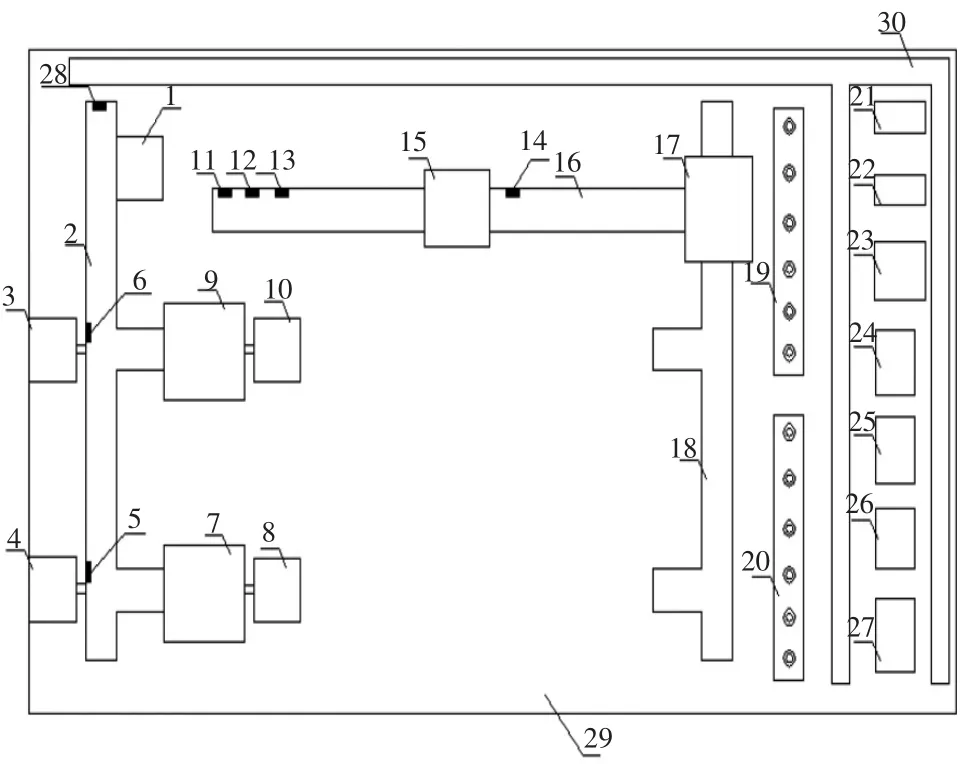
图1 实训装置平面布置图
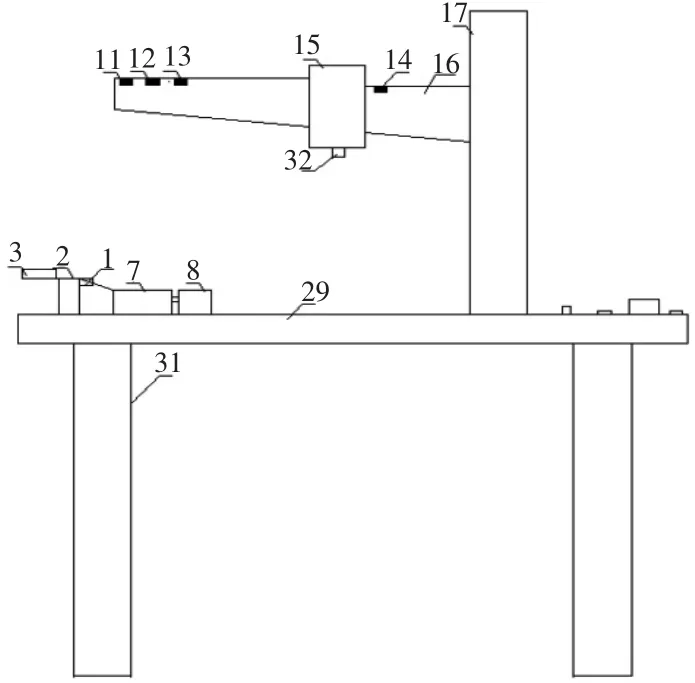
图2 实训装置立面图
1为直流电机、2为皮带、3为推白色料气缸、4为推黑色料气缸、5为黑色料检测传感器、6为白色料检测传感器、7为黑色工件加工工作台、8为夹紧黑色工件气缸、9为白色工件加工工作台、10为夹紧白色工件气缸,11-14为位置检测传感器、15为主轴箱、16为摇臂、17为立柱、18为机器固定槽、19为指示灯组、20为按钮、21为变频器、22为交流伺服驱动器、23为步进电机驱动器、24为电源组、25为气缸组、26为电磁阀组、27为PLC控制器、28为工件检测传感器、29为汇线槽、30为铝合金底座、31为支架立柱、32为主轴。
所述步进伺服电机综合实训装置,在铝合金底板上安装有输送装置、加工装置和辅助控制装置。输送装置、加工装置通过电缆和气源管与辅助控制装置连接。
(5)从工艺上讲,对小于0.045 mm细泥在底流中的混杂率要求并不很严格,本次试验为21.27%,水力分级效率=粗粒正配率-细泥混杂率=77.56%,此值符合现实情况。
所述的步进伺服电机综合实训装置,输送装置包含工件检测传感器28、直流电机1、皮带2、推白色料气缸3、推黑色料气缸4、黑色料检测传感器5、白色料检测传感器6、黑色工件加工工作台7、夹紧黑色工件气缸8、白色工件加工工作台9、夹紧白色工件气缸10,电机 1、检测传感器 5、6、28 通过电缆,气缸 3、4、8、10通过电缆和气源管与辅助控制装置连接。
所述的步进伺服电机综合实训装置,加工装置包含立柱17、摇臂16、主轴箱15、主轴32、位置检测传感器11-14、机器固定槽18.摇臂16上下控制采用伺服电动机拖动,摇臂16左右控制采用步进电动机拖动,主轴箱15移动控制由交流电动机采用变频器拖动,主轴32动作由直流电动机控制。摇臂16、主轴箱15、主轴32、位置检测传感器11-14通过电缆与辅助控制装置连接。
所述的步进伺服电机综合实训装置,辅助控制装置包含指示灯组19、按钮20、变频器21、交流伺服驱动器22、步进电机驱动器23、电源组24、气缸组25、电磁阀组26和PLC控制器27.
所述的步进伺服电机综合实训装置可进行多种实训的组合。
(1)直线定位控制系统:通过PLC控制器、交流伺服电机、主轴箱、主轴、位置检测传感器组合,控制主轴箱精确达到摇臂指定位置。
(2)角度定位控制系统:通过PLC控制器、步进电机、立柱、摇臂、主轴箱、主轴、位置检测传感器组合,控制主轴箱旋转一定角度精确到指定位置。
(3)电机变频控制系统:通过PLC控制器、直流电机、变频器、皮带、工件组合,实现工件按一定速度在皮带运输控制实训。
(4)物体输送装置控制系统:通过PLC控制器、直流电机、皮带、推白色料气缸、推黑色料气缸、黑色料检测传感器、白色料检测传感器、黑色工件加工工作台、夹紧黑色工件气缸、白色工件加工工作台、夹紧白色工件气缸组合,实现PLC对输送工件装置控制实训。
(5)气源管路安装系统:将推白色料气缸、推黑色料气缸、夹紧黑色工件气缸、夹紧白色工件气缸通过气源管,经汇线槽与电磁阀组连接;电磁阀组气源与供气装置连接,实现气源管路安装实训。
(6)电气线路安装系统:将电机、检测传感器、电磁阀组、指示灯组、按钮、变频器、步进电机、交流伺服电机的电源线、信号线通过汇线槽连接到PLC控制器及电源组,实现电气线路安装实训。
(7)气动部件拆装:通过对推白色料气缸、推黑色料气缸、夹紧白色工件气缸、夹紧黑色工件气缸的拆卸和安装,实现对气动部件拆装实训。
3 步进伺服电机综合实训装置应用意义
随着中国经济的迅速发展,产业升级,智能化产业应运而生,机器人的使用将大量普及,并逐步取代人工岗位[2]。企业自动化生产线上的机器人控制中精确定位将大量使用到步进电机,伺服电机,PLC控制器及变频器,而机器人的使用也必将需要大量的工程技术人员进行开发,维护维修[3]。培养智能化技术人员,服务于企业是高职院校的主要职责,步进伺服电机综合实训装置的开发应用对于培养高职学生掌握机器人相关知识具有重要的应用意义,具体如下:
(1)本实训装置由专业教师与企业从事机电一体化的技术人员共同研制,根据企业实际使用零件加工设备提炼浓缩,依据教学理论及手段,综合企业实际实用案例,将两者有机结合而成。
(2)步进伺服电机综合实训装置,将机电类学生所学的电机、控制、气动、检测等知识有机融合,整个实训装置为开放式,实训内容丰富,学生可以按自己的思路安装、接线、调整、调试完成工作,增强锻炼学生实际动手能力和编程能力。
(3)综合实训装置在提高学生动手能力的同时,也提高了教师整合能力。
(4)为相关课程开展线上线下混合式教学提供实训平台,可极大的扩展实训内容。
(5)实训装置为教师提供科研平台,可利用相关设备开展科学技术研究,实现服务于企业技术改革创新。
4 结束语
本实训装置为学生提供了丰富的创新性实验,通过直流电机、步进、伺服、变频和组态等课程实训,可将相关课程进行相互融合、相互渗透,全面提升高职院校机电类专业学生综合设计分析能力,以及解决问题的实际能力。该实训装置已经应用于我系学生的相关课程实训当中,在实际应用中取得了良好的效果,极大推动了系部相关课程的改革工作。
参考文献:
[1]刘遥生,林 玲,潘 锋.多轴运动控制技术实验平台的设计[J].深圳职业技术学院学报,2007(4):197-199.
[2]赵光伟,张 帆,杨松立,等.步进电动机速度控制系统的设计[J].科技视界,2014(9):53-54.
[3]李金城,付明忠.三菱FX系列PLC定位控制应用技术[M].北京:人民交通出版社,2007.
猜你喜欢
微特电机(2020年11期)2020-12-30
当代陕西(2019年24期)2020-01-18
汽车维护与修理(2019年1期)2019-07-09
模具制造(2019年4期)2019-06-24
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
科学与财富(2016年34期)2017-03-23
电子制作(2016年1期)2016-11-07
