
基于ADAMS的桁架式三自由度伺服机械手路径规划和仿真
2018-04-02 07:17鲍仲辅曾德江
装备制造技术 2018年1期
鲍仲辅,曾德江
(广东机电职业技术学院,广东 广州510515)
0 前言
桁架式三自由度伺服机械手通常以伺服电机为动力元件,以滚珠丝杠、同步带、齿条机构等直线模组为主要传动形式,精度要求不高的场合可以气缸代替,机械手基体多为金属型材构成的桁架式结构。此类机械手一般多为三个轴向移动自由度,或两个移动和一个转动,可实施上下料、移栽、码垛、焊接、点胶、3D打印等多种工作。这种机械手体积较大,但是结构简单,便于控制,对工作环境要求不高,具有良好的性价比,因此在制造类企业中有广泛的应用。
机械手在使用过程中最常见的问题就是运动规划,也就是根据需要的动作路径和运动参数求出运动输入规律,即动力学反问题。常用的解决办法就是基于DH坐标系构建机械手的坐标体系,通过矩阵变换求解,计算过程较为复杂[1]。基于机械数字仿真技术,可探索解决机械手轨迹规划的新思路和途径,如天津大学梅江平等人基于仿真对并联机械手动态特性展开分析[2]。本文基于ADAMS动力学分析软件,以一款桁架式三自由度伺服机械手空间螺旋线匀速路径规划问题为例,采用虚拟仿真实现求解。
1 机械手结构分析
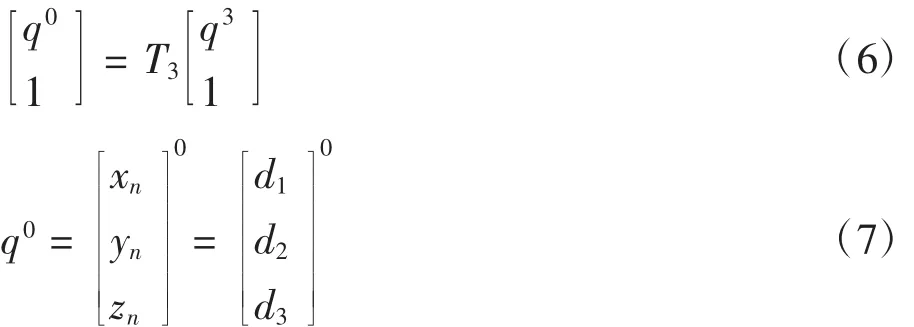
桁架式三自由度伺服机械手一般分为基座、肩部和手臂三个部分,其中肩部在基座上可以水平直线运动,通常标记为X轴,也称为横行机构。手臂在肩部上也可以水平直线运动,通常记为Y轴,也称为引拔机构。手臂自身可以在垂直方向直线运动,通常记为Z轴,主要结构如图1所示。该机械手的X轴因需承载另外两轴方向的结构件和工件,惯性载荷较大,所以多选择稳定性较强的滚珠丝杠作为动力传动元件。Y轴惯性载荷较小,同时需要有较快速的响应性能,以同步带进行传动。Z轴直接连接执行元件,需要有较高的稳定性和定位精度,采用齿条机构进行传动。为保证结构稳定和传动准确,每个自由度均需配有直线导轨加以导向,其中X和Y轴均采用导轨固定滑块移动的安装形式,而Z轴由于空间局限,则采用滑块固定,导轨移动的安装形式。

图1 机械手结构
2 机械手轨迹规划原理
2.1 基于DH坐标系求解关节直线位移
基于DH法构建机械手坐标系[3],如图2所示。

图2 机械手坐标系
将工作轨迹的动点q坐标建在机械手末端执行器参考原点O3,则q点在O3坐标系的坐标为:

给定工作动点q的轨迹,求解其在基坐标系O0下q0与各个关节位移量,即可确定要是实现预定运动每个关节所要输出的位移量。
2.2 由关节直线位移求解电机角位移
由于该机械手三自由度均由伺服电机提供动力,并采用了不同的传动形式,为进一步求出电机输出转数,还要确定各个关节线性位移与电机转数的关系。
X轴因采用丝杠传动,因此电机输出转数与横行机构平台线性位移d1有以下关系:

其中p是滚珠丝杠导程,本文取值20 mm.
Y轴因采用同步带传动,因此电机输出转数n2与引拔机构平台线性位移d2有以下关系:

其中r是同步带轮节圆半径,为40 mm.
Y轴因采用齿轮和齿条传动,因此电机输出转数n3与手臂线性位移d3有以下关系:

其中m是齿轮和齿条的模数,为5 mm;z为齿轮齿数,为20.
3 基于ADAMS的仿真分析
3.1 机械手数字建模
ADAMS是机械运动学和动力学分析的有效工具,由于其三维建模功能较弱,因此先在solidworks中建模再导入ADAMS中。再按照机械运动类型添加构件之间的运动副,为减少计算量省略所有联接类零件,无相对运动的零件均采取“Fixed Joint”配合,最终样机如图3所示。
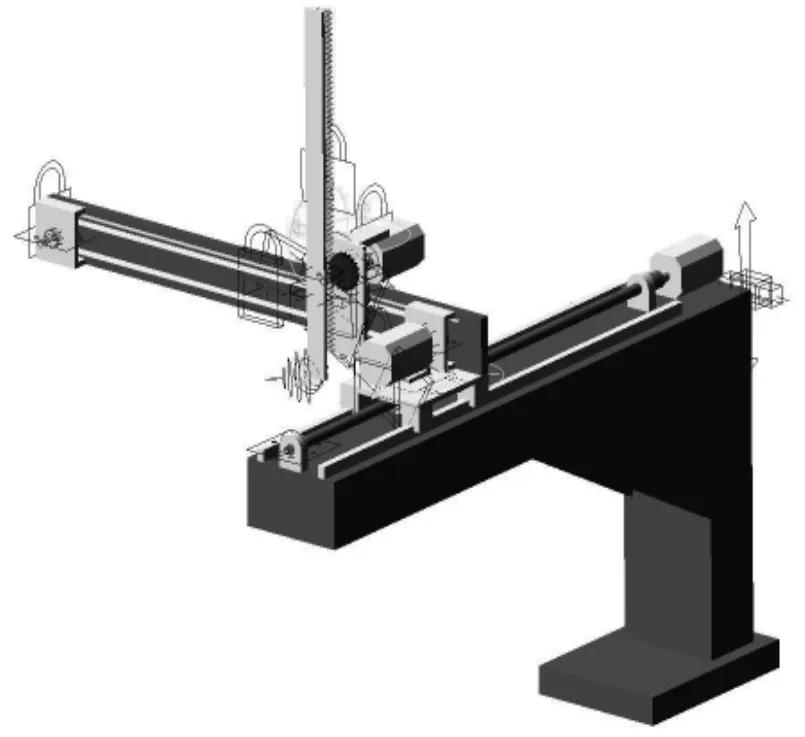
图3 基于ADAMS构建机械手数字样机模型
3.2 定义机械手末端路径
利用ADAMS中“一般点驱动”和“样条函数驱动”工具,可直接对机械手末端执行器的参考点定义驱动函数。由空间解析几何可知空间螺旋线方程为:

其中a为螺旋线半径,b为导程,T为周期,t为自变量,在ADAMS用time表示。
依据以上方程式,给机械手末端执行器参考点添加运动驱动,只需要给该点X,Y,Z三个方向的自由度输入参数方程即可。本文a取值0.25,b取值0.08.需要说明的是,机械手的坐标原点不一定是运动的起始点,因此在建立一般点驱动之前要明确运动起始点。可利用建立参考坐标系的方法来指定该点,同时也可以利用次坐标来作为方程的参考坐标。例如本文中机械手初始运动起点即为(0.8,0.3,0.2)。
4 仿真结果分析
4.1 运动轨迹验证
经过仿真计算后,输出机械手末端执行器参考坐标轨迹,如图4所示。由图可知,运动轨迹为空间螺旋线,完全复合预定要求。
图4 对手臂端点的轨迹跟踪
4.2 关节位移与电机输出分析
以轨迹起点为参考坐标原点查询各关节的相对位移,分别建立三个关节的位移测量值,同时依据公式(8)、(9)、(10),由关节的线性位移计算出相应伺服电机转数,输出结果如图5所示。


图5 根据运动轨迹反求各电机输入
以工作台为对像查询位移结果分析可知,机械手X轴方向线性位移d1和Y轴方向位移d2都以正弦规律直线运动,两者频率和幅值相同仅相差一个相位角。Z轴方向直线位移d3匀速直线向下运动,三者运动合成为空间螺旋线。
从电机运行的图解来看,X轴的驱动电机输入转速相较于Y轴要快很多,这是由于丝杠的导程较小,使得其传动比比同步带要小。
4.3 机械手工作性能分析
基于仿真可以对该款机械手的工作性能有进一步的深入分析。由于X轴采用的滚珠丝杠,稳定性较高但当机械手执行动作范围较大以及速度变化快的作业时,其电机的负荷比较重。Y轴采用同步带驱动,传动比大,响应速度快,但是由于皮带属于挠性件传动,本身刚度低,在加减速阶段惯性载荷较大的情况下,易发生振动,对机械手精度有一定影响。Z轴采用齿轮齿条,具有较好的综合性能。综上该机械手在执行具体工作时应该要结合其自身性能特点设计路径。
5 结束语
本文对一款三自由度机械手做空间螺旋线路径运动开展了规划研究,先基于DH坐标法构建了机械的数学模型,再基于ADAMS仿真分析精确的获得各轴电机的驱动规律,最后针对不同类型的传动机构的分析了机械手运动特性,对机械手实施高精度的作业提供了建设性意见。基于数字仿真技术开展机器人的规划研究,能避免复杂的矩阵计算,能快速精确的获得动力学反问题的求解,这种思路和方法在实际生产中可显著提高开发设计工作的效率和精度。
参考文献:
[1]蔡自兴.机器人学[M].北京:清华大学出版社,2009:50-53.
[2]梅江平,薛 娜,刘松涛,等.一种4自由度高速并联机械手动态特性分析[J].天津大学学报(自然科学与工程技术版),2015,48(12):1083-1090.
[3]李海驻,胡志刚,郭利君,等.三自由度机械手的仿真研究[J].机械设计与制造,2014(10):186-189.
猜你喜欢
橡胶科技(2022年5期)2022-07-20
重庆理工大学学报(自然科学)(2022年2期)2022-03-23
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
长春大学学报(2021年4期)2021-05-17
小学生学习指导(高年级)(2021年3期)2021-04-06
娃娃乐园·综合智能(2020年9期)2020-09-25
电子技术与软件工程(2020年6期)2020-02-03
探测与控制学报(2018年1期)2018-03-12
制造技术与机床(2017年3期)2017-06-23
探测与控制学报(2017年1期)2017-03-23
