
基于STM32的爬墙机器人的设计
2018-03-30 09:00,,
机械与电子 2018年3期
,,
(重庆交通大学, 重庆 400074)
0 引言
爬墙机器人一直是国内外研究的一个热点[1],可以代替人进行高空作业,如高楼的清洁作业、地震救灾、大型船舶除锈和桥梁检测等。目前,国内外在爬墙机器人的研究上存在着一个关键性的技术难题,即机器人的吸附方式。在常见的吸附方式中,真空吸附原理是利用气压差,缺点是容易漏压;钢毛吸附原理是利用分子与分子之间的范德华力[2],设计的机器人对重量要求很轻;磁力吸附的爬墙机器人只能应用于导磁面[3],该类机器人局限性大。
在此,采用真空吸附方式,研究了仿生学的相关理论[4],参考了许多已有的仿生的机器人的研究,设计了一款六足机器人。
1 爬墙机器人机械结构
现有的仿生机器人具备和自然界某些动物类似的行走方式,如华南理工大学研究的六足机器人模仿蜘蛛的行走姿态[5],南京航空航天大学研究的四足机器人模仿壁虎的行走姿态及吸附方式[6]。前者是利用传统的真空吸附方式,由于自由度比较多,用的驱动电机比较多,导致机器人本身较重,控制难度也增加了。后者采用钢毛吸附,这是目前研究的一个热点,但是由于技术不成熟,仿壁虎机器人的稳定性不高,无法进行搭载质量较重的设备进行作业。本文设计的机器人尽量减少机器人不必要的自由度,从而减少驱动电机的数量,降低控制难度,增强机器人的稳定性。去除机器人上不必要的结构,设计的机器人如图1所示。

图1 多足爬墙机器人3D模型
从图1可以看出,机器人由走行大骨架、走行小骨架、垂向导轨、横向导轨、2个步进电机、舵机和6个吸盘足组成。其中主要的结构如走行大、小骨架都是用铝合金,其他螺纹部件和支架用Q235。吸盘下面用大密度的海绵材料与墙面贴合,吸附效果好,漏压可能性小,可以应对多种粗糙的墙面。
机器人的走行的大、小骨架的关键结构为等边三角形,即骨架上的3个脚之间的连线是1个等边三角形。机器人运行时,首先,6只吸盘同时吸附在墙上,关闭小骨架上的控制电磁阀,使所有压强转到大骨架上的3个吸盘;接着,使小骨架远离墙面,运行大骨架上的步进电机,使小骨架上或下运动;小骨架上或下移动一段距离后,使小骨架靠近墙面,打开电磁阀,使小骨架的3个吸盘吸附在墙面上;然后,移动大骨架使爬墙机器人向下或者向上移动。转弯的时候,利用舵机先使小骨架转一定角度,然后使大骨架转动相同的角度。爬墙机器人的运行流程如图2所示。

图2 多足爬墙机器人运行流程
2 爬墙机器人真空吸附系统
采用真空吸附方式的机器人,通常采用2种方式抽真空,一种是机器人本身自带抽真空装置,另一种是通过外置抽真空装置,通过管道排出吸盘里面的空气。前者的不足之处是会使机器人重量增重,后者不足之处需要外置气管。本文采用的是外置空压机将压缩空气转化为真空的方法,设计的吸附系统如图3所示。
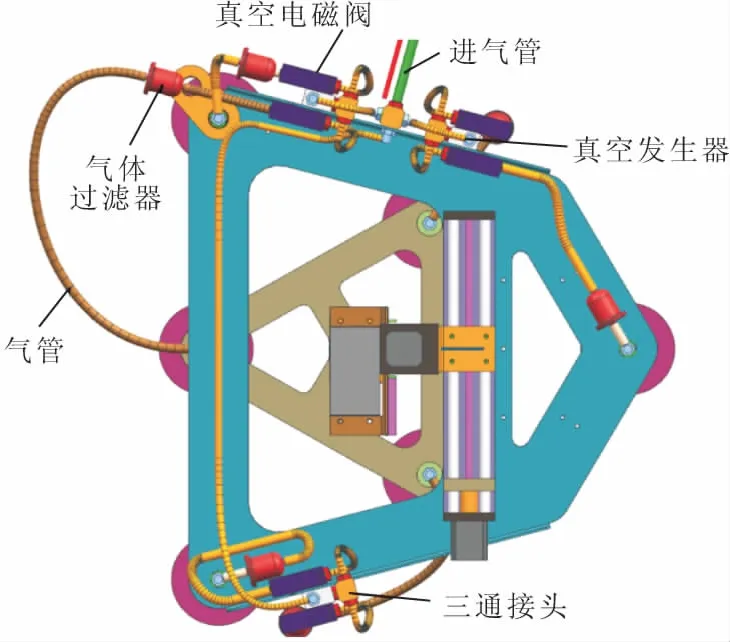
图3 真空吸附系统3D图
空压机产生的压缩空气通过进气管进来,通过三通接头分别给3个真空发生器供气,真空发生器与三通接头相连。气管出来与真空电磁阀相连。一共3个真空发生器,每个真空发生器负责排出2个吸盘里面的空气从而产生真空。每个吸盘配备1个真空电磁阀,电磁阀通电状态就会停止抽真空。每个吸盘连接处有1个气体过滤器,防止抽真空的时候把墙面的杂质给吸入管道。
真空发生器的原理是利用伯努利效应,当气体流动的速度加快时,气体周围的压力会变小。真空发生器的原理如图4所示。

图4 真空发生器的原理
图4中,压缩空气在管道内形成高速气流,使压缩空气管道上方管道压强减小,从而将吸盘里面的气体排出来,使吸盘吸附在墙面上。压缩空气流动的速度越快,真空发生器产生真空的能力越强。
3 爬墙机器人硬件设计
爬墙机器人的硬件部分主要分为电源、步进电机驱动、舵机控制电路、单片机时钟电路、复位电路、无线模块和传感器控制电路。硬件电路的组成如图5所示。

图5 硬件电路组成
整个控制供电采用24 V开关电源供电。爬墙机器人通常采用2种供电方式,一种是自带电源,另外一种是采用线路输送。前者会增加机器人的重量,续航也会受到影响。后者因为要使用电线输电,机器人的便携性要大打折扣。无线模板采用的是NRF24L01,传感器采用了陀螺仪和压力传感器,陀螺仪是直接通过单片机读取数据[7],压力传感器是通过比较传感器的电压来判断吸盘的压力是否工作在正在范围内。舵机和步进电机的控制,在满足其规定的PWM频率范围内,调节PWM的占空比,从而控制舵机的角度和步进电机的快慢。STM32F103系列可以产生多达30路的PWM[8],所以该芯片完全满足控制要求。
4 爬墙机器人程序设计
机器人的程序设计主要分为自动控制模式、手动模式。
机器人的程序流程如图6所示。自动控制模式只要根据连接好机器人的外部设备,并放到墙上,机器人就会根据设定的路线一步步的稳定前行,需要停止的时候,通过上位机或者手柄发送停止或者终点指令。手动模式主要用于调试的时候,手动控制机器人的每一个动作,严格按照机器人机械结构运行流程来操作。

图6 多足爬墙机器人程序流程
自动控制模式涉及到轨迹规划和避障。在轨迹规划中,主要通过陀螺仪来读取当前机器人的位置信息,然后生成机器人下一步的步态,机器人的行进距离是通过控制机器人步进电机的占空比来调整,旋转的角度也是通过控制舵机PWM的占空比来调整。在避障模式中,对于吸盘吸合过程,检测气压传感器是否达到标定的数值,如果发现负压不足,则使骨架移动相应的距离,重新测定气压传感器的数值。在自动控制模式中,通过上位机或者手柄发送停止模式,机器人在检测处于稳定吸附在墙面的情况下才会停止,停止后可以解除停止指令后继续运行。发送终点指令后,执行与停止指令相同的动作,但是不具备可恢复性,只能从程序的开始进行选择模式。
5 结束语
设计了爬墙机器人,通过UG建模后进行样机实验,解决了实际爬行过程中的各类问题,如吸盘的材质、空压机功率的选择等。控制系统基于32位的STM32的F1系列处理器,执行速度比传统的8位和16位单片机更快。
[1] 谢浩.多足爬墙机器人运动控制及步态研究[D].广州:华南理工大学,2015.
[2] 李言和,关阳.仿壁虎机器人地壁过度步态规划与运动仿真 [J].机电工程,2016,33(12):1428-1435,1447.
[3] 张小松.轮式悬磁吸附爬壁机器人研究[D].哈尔滨:哈尔滨工业大学,2012.
[4] 王国彪,陈殿生,陈科位,等.仿生机器人研究现状与发展趋势[J].机械工程学报,2015,51 (13):27-44.
[5] 王晓丰.多足爬墙机器人运动协调控制方法研究[D]. 广州:华南理工大学,2014.
[6] 杨斌,俞志伟,杨新海,等.仿壁虎机器人足端三维力采集系统研究[J].科学技术与工程,2016,16(32):75-79.
[7] 段栋栋.高精度MEMS陀螺仪的滤波算法研究[D].成都:电子科技大学,2014.
[8] 刘军,张洋,严汉宇.例说STM32[M].2版.北京:北京航空航天大学,2014.
猜你喜欢
当代陕西(2020年17期)2020-10-28
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
学苑创造·A版(2017年5期)2017-05-09
制造业自动化(2017年2期)2017-03-20
小猕猴学习画刊(2016年4期)2016-11-19
故事作文·低年级(2016年2期)2016-09-10
林业与生态(2016年2期)2016-02-27
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
