基于计算机视觉的玉米田间除草系统开发
2018-03-28 00:49黄荣喜
农机化研究 2018年3期
黄荣喜
(广西农业职业技术学院 电子信息工程系,南宁 530007)
0 引言
农作物在生长过程中会受到各种生物和非生物逆境的影响,生物逆境主要包括病、虫和杂草危害。杂草会与农作物竞争营养、水分、光照和生长发育空间,并且传播病虫害,或者为病虫害提供滋生场所,给农业造成严重的损失。据初步统计,我国的农田杂草超过1 400种,分属于87科的366个属,严重危害农业生产的主要杂草有60种多,部分为从国外传人的恶性杂草。20世纪末,杂草在世界范围内给农业生产造成的损失达到了763亿美元[1]。联合国粮农组织的统计结果表明:世界的粮食作物因生物逆境损失30%~35%,其中归因于杂草的为10%,数量达到2.9亿t。在我国,这一比例也是10%,每年损失的粮食超过1 000万t,农产品质量同时受到影响[2]。
及时有效地去除杂草是保证农作物高产稳产的一项重要措施,目前采用的除草方法有人工除草、机械除草和化学除草。人工拔除杂草方法的劳动强度大、效率较低,不符合现代农业和精准农业的发展趋势。机械除草是在耕、翻、耙等田间作业过程中利用除草铲或除草耙等将杂草铲除或深埋,从而达到除草的目的。这一方法的作业速度快、效率高,是推动农业可持续发展的关键技术。目前,除草机械已经开发出了多种型号,能够满足不同农作物在各种种植条件下的生产需求;但是,机械除草方法的作业精度和选择性较差,适用于农作物出苗前的田间除草或作物行间的除草,无法实现对株间杂草的根除[3]。
化学除草即通过喷洒化学除草剂来杀灭杂草,是应用最广泛和最有效的除草方法。化学除草操作方便快捷,除草效率高,成本较低。但是,该方法也面临着一些问题和挑战,如部分除草剂对农作物具有毒性,同时除草剂的粗放式大面积喷洒也带来了浪费问题,以及在粮食和环境中残留所引起的安全问题[4]。另外,除草剂在局部的过量喷洒会对作物造成药害。随着基因工程技术的发展,一些能对特定除草剂产生抗性的基因已经被转入部分农作物,用于杂草的化学防治。例如,抗草甘膦的EPSP基因和抗草铵膦的Bar基因,它们转入棉花和水稻后都能赋予这些作物对上述除草剂的抗性,从而在化学除草作业中不会受到除草剂的危害。
针对粗放喷洒所引起的浪费和残留问题,人们提出了变量喷药的概念,并进行了相关的试验和研究[5]。变量喷药是基于精准农业发展起来的一种技术,它是根据杂草在田间的位置、种类和密度,对除草剂喷洒的时机和剂量进行变量调节,从而达到减少除草剂用量,及提高杂草去除率的效果。要实现变量喷药,关键在于对田间杂草的准确识别,准确获取其位置、分布、密度和种类等信息[6]。
目前,用于识别田间杂草的主要方法有人工识别、遥感识别和计算机视觉识别。其中,人工识别方法劳动强度大,效率较低,识别效果主要依赖于劳动者的实践经验,不是农业现代化的发展方向;遥感识别由于观测距离太远,导致分辨率低,只适合对种植区域内的杂草生长情况进行判别和预测,对局部乃至作物株行间的杂草识别效果较差,无法达到精准农业的要求[7];计算机视觉是利用拍摄设备获取图像,然后应用电脑对目标图像进行分析和识别。这一技术的核心是对图像的理解和分析,关键在于对图像的分割和对目标特征的识别上。计算机视觉可以用于对田间杂草的快速准确识别,是精准农业发展的一项重要技术[8-12]。
玉米是我国重要的粮食作物,遍布在大多数省份。玉米的种植区域环境各异,使得田间杂草群落复杂,包括马唐、稗草、黎和牛筋草等,生命力强,引起玉米较大的产量损失。另外,各种农药和除草剂的频繁使用,也导致杂草防治的难度逐年增加。因此,提高现有玉米除草机械的自动化水平,具有很大的现实意义[13]。本文针对我国玉米各种植区域杂草种类繁多,危害严重且防治难度大的问题,开发了一种利用计算机视觉技术对玉米田间杂草进行识别、控制喷药装置进行变量喷药的除草系统,并在田间进行杂草的识别试验,在室内验证变量喷药的准确性,旨在为玉米田间的机械化除草提供技术支持。
1 系统的设计原理及结构
1.1 设计原理
利用数码相机拍摄玉米田间图像,导入计算机中用图像处理软件分析,经过灰度化、图像分割和目标特征识别后提取杂草的信息并传递给喷药控制系统。喷药控制系统根据杂草的位置和密度信息,结合机械的行进速度控制喷头的开闭时间和程度,实现变量喷药。系统每采集分析1幅图像后就行进1幅图像中的距离,并完成1个系列的喷药作业,然后进入下一个重复的操作。
1.2 总体设计
整个系统装载在由玛特斯1YWG型机械改装的自行履带式喷药机械上,机械距地高度0.5m,作业面宽2m,能够满足玉米苗期的作业要求。除草系统主要由图像采集处理模块和变量喷药控制执行模块两部分组成,图像采集处理模块包括数码相机、A/D转换器、计算机及装载的图像处理软件;变量喷药控制执行模块包括单片机、速度感应器、电磁阀和喷头。各模块由自行机械上所带的蓄电池提供电源。具体装置之间的连接如图1所示。
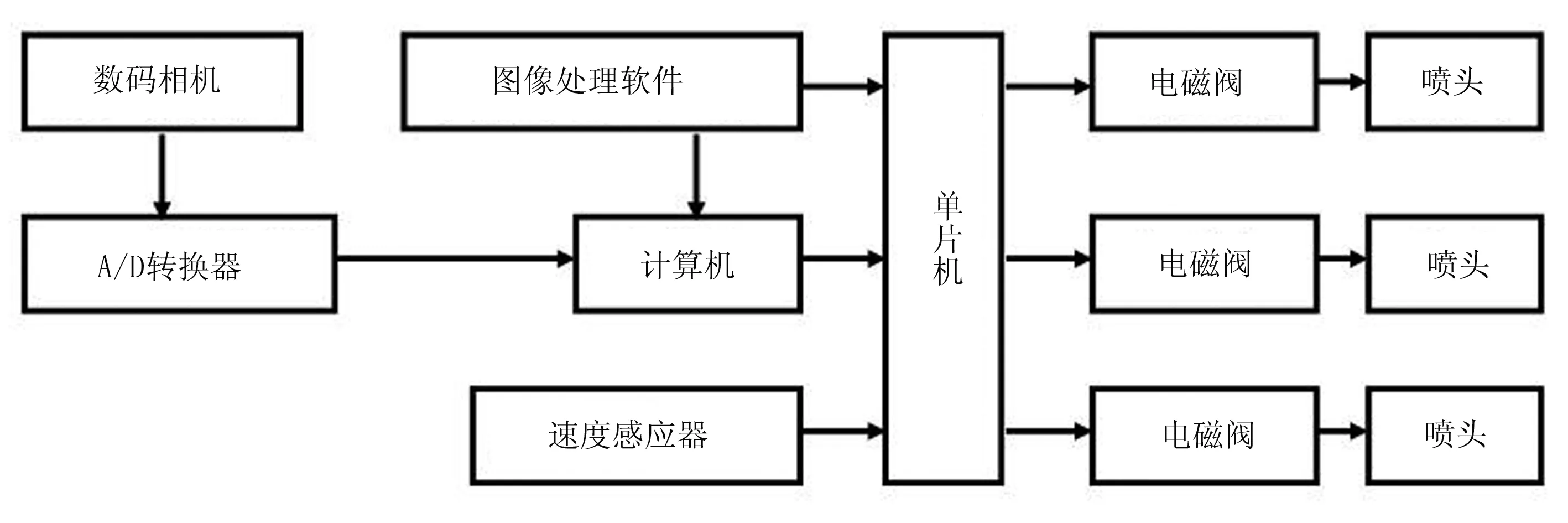
图1 系统的工作流程Fig.1 Working flow chart of the system
2 系统的组成
2.1 图像采集处理模块
图像采集处理模块由数码相机、A/D转换器、计算机和装载的图像处理软件组成。数码相机为尼康D810型单目相机,安装在除草机械的前部顶端,离地高度1.5m,俯视角30°。该型相机结构紧凑,体积较小,采用防抖动安装。相机一次拍摄可以获取2m×2m范围的田间图像用于分析,拍摄的频率受系统控制,由机械进行的速度决定。采集的原始图像为模拟信号,形成2 080万像素的JEPG格式图片,经过A/D转换器形成BMP格式后导入核心计算机中,由计算机的数字图像软件进行后续的处理。
核心计算机的硬件系统为联想T6900C型,CPU为Intel 酷睿i76700,内存为8GB的DDR4型,安装的图像处理软件为MatLab工具箱,运行速度快,可以满足对图像实时分析处理的要求。拍摄的图片因俯视角而存在一定程度的畸变,会影响后续处方图的网格划分。因此,采用纪寿文等的方法矫正图像的畸变,然后再通过中值滤波消除拍摄时随机扰动产生的噪音干扰[14]。
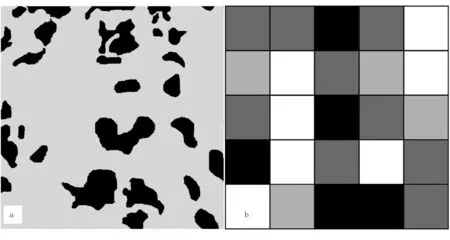
玉米田中的苗草都为绿色,土壤为黄褐色,同时还存在一些灰白色杂物,因此须要先利用颜色的差异将植物进行分离。本研究选用了超绿(2G-R-B)模型的颜色空间来对图像进行灰度化处理。处理后的图像如图2所示。

(a) 原始图像 (b) 灰度化图像 图2 玉米田间杂草图像的灰度化Fig.2 Graying of weed image in corn field
计算机视觉要按照特定的标准或依据才能实现对杂草的识别,即杂草与玉米植株之间的特征差异。在大部分研究中,都是根据外部形态特征来判别杂草,本文选用的是叶片的长宽比和圆度这两个特征。长宽比是叶片的最小外接矩形的长与宽的比值,圆度是叶片面积与周长平方的比值。为提高杂草识别速率,图像的分割采用运算模型较为简单的阈值分割法。将灰度化图像变换为直方图后,对3个分量分别做最大类间方差分析,然后进行图像的二值化,获得各形状特征的阈值T1和T2。
将每张图像划分为5行×5列的处方图,计算每个区域中两个形状特征值,若某个区域的长宽比<阈值T1且圆度>阈值T2,即判定存在杂草。特征值的大小则反映杂草的密度或生长状况,在处方图中通过灰度的深浅表示。对于一些叶片性状与玉米相识的单子叶杂草,则根据玉米苗期茎的颜色特征,用绿-红指标进行分割识别。试验发现,该模块对田间杂草的识别率为90%,处理单张图片的平均耗时为86ms,能满足机械快速行进过程中对杂草进行实时识别的要求,最后的识别结果如图3所示。
(a) 识别图像 (b) 处方图 图3 玉米田间杂草的识别Fig.3 Identification of weed in corn field
2.2 变量喷药控制执行模块
变量喷药控制执行模块由单片机、速度感应器、电磁阀和喷头组成。以AT90C51型单片机作为控制模块的核心,用于接受计算机发来的杂草信息,并结合速度感应器的数据,通过计算确定需要喷药的网格区域及合适的喷药时机,然后向除草执行模块发出作业指令,实现变量喷药。速度感应装置为安装在机械地轮上的YS96B型霍尔元件,用于采集机械行进时输出轴转动产生的脉冲信号,转换为速度后输出。
喷头安装在机械的前端,离地高度0.7m,共5个。每个喷头由1个电池阀控制,对应处方图中的1列方格。喷头类型为实心锥,喷洒的药液呈圆形分布,一次喷洒的药液调节为覆盖以方格中心为圆心,半径达0.2m的圆形面积。若某个方格内有杂草,喷头运动到其中点上方时便开启喷药。电磁阀通过脉冲宽度调制技术改变喷头控制阀门的开关状态和开关程度,从而实现变量喷药。4种占空比分别为0、33%、67%、100%,对应处方图中4种除草剂喷洒剂量。
3 试验结果与分析
3.1 试验设计
除草系统的准确性在室内进行验证,试验在制作的土槽上进行。将土槽划分为5列方格,每个方格的大小为0.4m×0.4m,随机选择50个方格栽种杂草。机械在土槽边上与其在轮距相同的轨道上行走,设置3个速度分别是0.2、0.3、0.4、0.5m/s,进行不同速度下的变量喷药试验。喷药精确性的评价为:杂草叶表面75%以上被喷药液定义为精确喷洒,杂草叶表面25%~75%被喷药液定义为较精确喷洒,杂草叶表面25%以下被喷药液定义为漏喷洒,无杂草方格被喷洒的定义为误喷。
3.2 试验结果和分析
当机械速度为0.2m/s时,喷洒的精确率为96%,漏喷洒数很少,没有出现误喷洒的情况,变量喷药表现出很好的准确性。随着机械速度的增加,喷洒的精确率下降,漏喷洒数增加,并且出现误喷洒的情况,导致药液的浪费和残留污染。若要兼顾变量喷药的准确性和作业效率,则该系统的行进速度设定在0.3m/s较为合适。具体试验结果如表1所示。
4 结论
基于计算机视觉技术开发的玉米田间变量喷药除草系统,结构紧凑、智能化程度高、成本较低,能够准确快速地识别田间杂草。其在室内0.3m/s的速度下表现出最好的作业效率,具有在实际生产中应用的潜力。系统的准确性试验是在室内进行的,若在田间实际应用,就会面临更为复杂的环境,其性能势必会受到各种因素的干扰。另外,随着速度的增加,漏喷洒和误喷洒的数目也随之增加,说明系统对杂草的识别及对变量喷药的控制准确性开始降低。因此,针对上述问题,还须要在后续研究中进行相应的优化和改进,以提高其性能的稳定性。
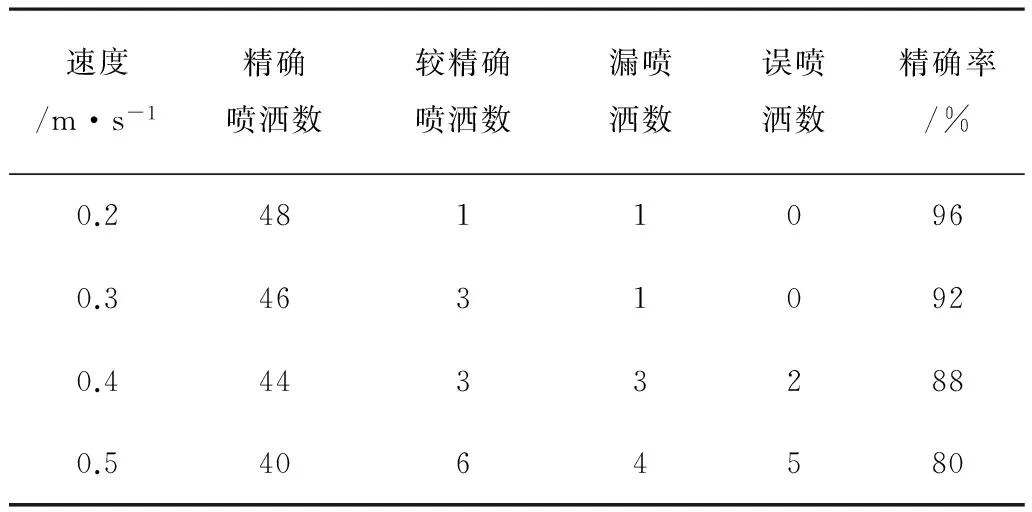
表1 系统准确性的室内验证Table 1 Accuracy verification of the system in laboratory
[1] 方如明,蔡健荣,许俐.计算机图像处理技术及其在农业工程中的应用[J].北京:清华大学出版社,1999:171-178.
[2] 李江国,刘占良,张晋国,等.国内外田间机械除草技术研究现状[J].农机化研究,2006, 28(10):14-16.
[3] 范德耀,姚青,杨保军,等.田间杂草识别与除草技术智能化研究进展[J].中国农业科学,2010, 43(9):1823-1833.
[4] 裴文超,陈树人,尹东富.基于DSP和单片机的实时对靶喷施除草系统[J].农机化研究,2012, 34(1):149-153.
[5] 尹东富,陈树人,裴文超,等.基于处方图的室内变量喷药系统设计[J].农业工程学报,2011, 27(4):131-135.
[6] 刘艳红.田间杂草识别软件系统的研究[J].农业网络信息,2015(5): 31-33.
[7] 杨会清,孙丽燕,刘红.田间杂草识别的机器视觉系统及机械除草研究[J].农业机械,2011(19):126-129.
[8] 纪寿文,王荣本,陈佳娟,等.应用计算机图形处理技术识别玉米苗期田间杂草的研究[J].农业工程学报,2001,17(2):154-156.
[9] 侯晨伟,陈丽.基于概率神经网络的玉米苗期杂草识别方法的研究[J].农机化研究,2010,32(11):41-43.
[10] 金小俊,陈勇,侯学贵,等.基于机器视觉的除草机器人杂草识别[J].山东科技大学学报:自然科学版,2012,31(2):104-108.
[11] 李谦,蔡晓华.机器视觉在除草机器人中的应用[J].农机化研究,2014,36(7):204-206.
[12] 张红旗,刘宇,王春光.改进田间杂草识别图像预处理方法的研究[J].农机化研究,2015,37(6):70-73.
[13] 张漫,项明,魏爽,等.玉米中耕除草复合导航系统设计与试验[J].农业机械学报,2015,46(S1):8-14.
[14] 纪寿文,王荣本,陈佳娟,等.应用计算机图形处理技术识别玉米苗期田间杂草的研究[J].农业工程学报,2001,17(2):154-156.
猜你喜欢
今日农业(2022年15期)2022-09-20
今日农业(2022年14期)2022-09-15
趣味(作文与阅读)(2022年3期)2022-06-10
信息记录材料(2022年3期)2022-05-17
今日农业(2021年8期)2021-11-28
今日农业(2021年13期)2021-11-26
今日农业(2021年21期)2021-11-26
今日农业(2021年2期)2021-03-19
金桥(2020年9期)2020-10-27
农家参谋(2020年6期)2020-07-29