自适应移动转向多功能园林修剪机械设计
2018-03-28 00:49倪江楠朱西方
农机化研究 2018年3期
倪江楠,朱西方
(河南工业职业技术学院,河南 南阳 473000)
0 引言
自主导航技术研究的一个重要方向是避障功能,要想使农机作业有效地自主避开障碍物,首先是要对障碍物的距离、尺寸类型等进行检测[1-3]。虽然,这项技术进行了大量的研究,从不同环境模型到不同类型的传感器,但是完全实用性的产品还没有出现,其技术也有待于进一步提高[4]。在农机自主导航方面,要想实现路径规划和避障功能,必须使农机本身携带的传感器具有障碍物信息识别功能[5-7]。近年来,随着激光雷达技术的不断发展,激光传感器可以为导航提供精度更高的信息;并且信息精度较高,由此在移动自主导航机械中使用的也越来越多,将其使用在园林修剪机械的自主导航系统中,可以有效地提高系统的性能[8-12]。
1 园林修剪机械激光传感器定位系统设计
采用激光导航具有测量范围大、光束直径小、测量精度高等优点,且激光雷达作业时不受环境的影响,在光线不好的环境中依然能保持较高的测量精度,因此在农业中也开始被越来越广泛的应用由于园林枝叶修剪属于精细作业,作业速度慢,劳动强度大,其自动化作业需求较大。人工园林的枝叶修剪作业如图1所示。

图1 人工园林修剪作业场景图Fig.1 The scene graph of pruning operation of artificial garden
采用人工作业,修剪过程较慢、作业强度较高,但园林修剪作业又往往是行列较为整齐的树木,如果采用自动转向换行的修剪机械,可以大大地降低人工作业的劳动强度[15-19]。本文设计了一种基于激光传感器的自适应移动和转向修剪机械,其作业流程如图2所示。
根据激光测距自适应移动转向修剪机械的作业流程,设计了该机械作业装置的整体框架,主要包括PC处理器、激光发射和接收装置,以及CPLD时间间隔计时器等,如图3所示。
激光测距自适应转向系统采用脉冲开关实现PC机的自动复位,实现自适应功能,通过CPLD计时部分完成装置的自动化控制,最后将控制结果通过显示器实时显示[20-23]。
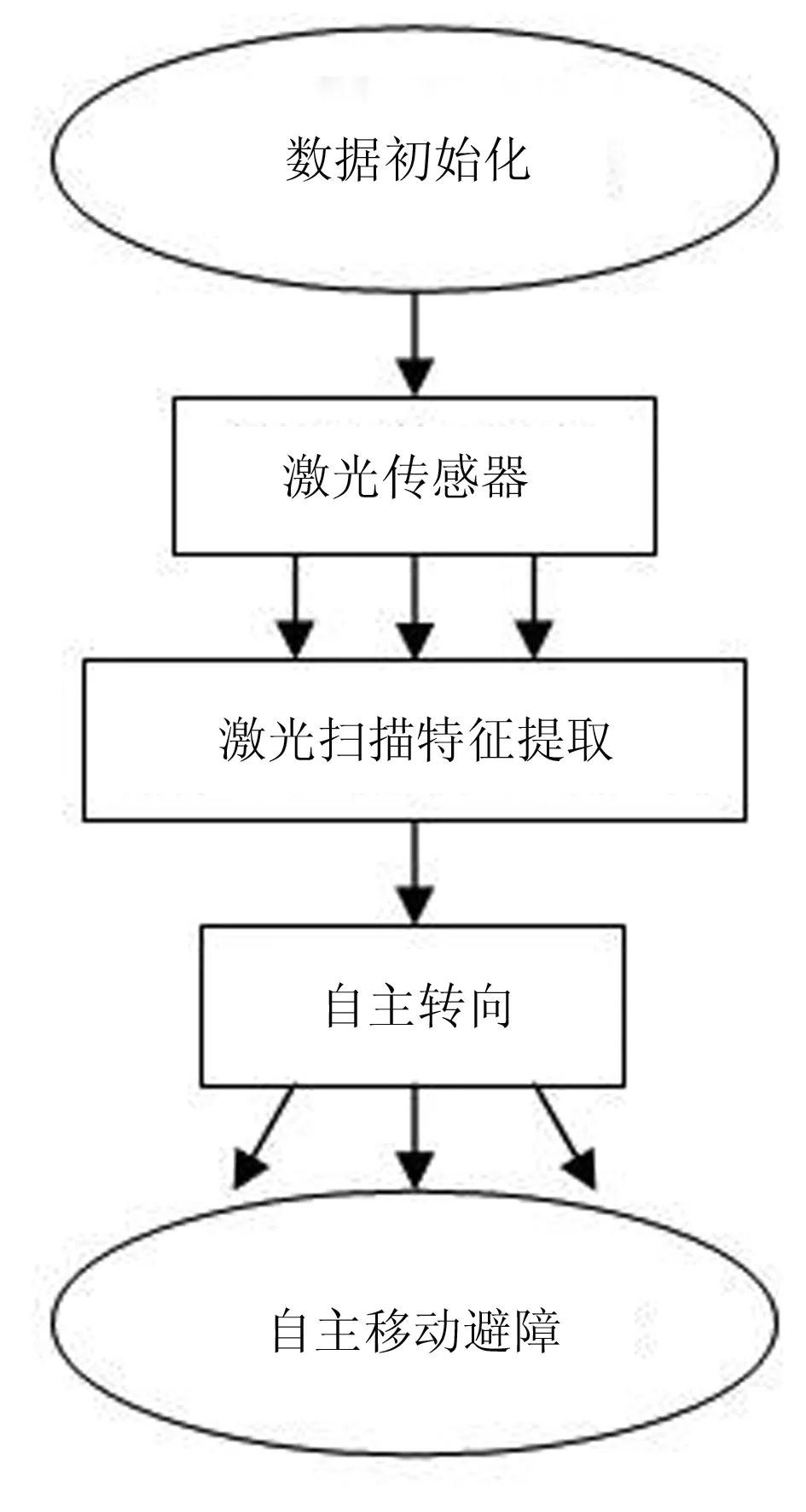
图2 自适应移动转向流程图Fig.2 The flow chart of adaptive moving steering

图3 激光测距自适应转向系统框架Fig.3 The adaptive steering system framework of laser ranging
2 激光测距和自适应移动转向原理
园林修剪机械的自适应移动转向主要依据激光测距和扫描原理,激光测距的原理比较简单[24-29]。假设激光发射器发出的激光在空气中的传播速度是V,其传播过程如图4所示。
当激光达到障碍物时会被反射回来,并被光电探测器接收,发射和接收共使用的时间为T,则测量距离为
S=VT/2
(1)
激光光强按高斯均匀分布,假设激光发射器的峰值功率为TtPt,发射的激光束的立体角为Ωt,激光的传送距离为R,由此可以得到激光在辐射被测物体上的照度为
(2)
其中,Ta是表示激光在传输过程中每传送距离为R时的大气透过率,则

(3)
其中,σ(λSRv)为大气消光系数。假定被测得的障碍物时理想的满反射体,则其可以作为二次辐射源,辐射亮度与出射照度之间的关系为
(4)
若被测障碍物的漫反射率为ρ,则目标的辐射出射度为Mm=ρEt,于是被测障碍物的辐射亮度为
(5)
在实际测量障碍物时,可以利用激光扫描得到的辐射亮度,判断障碍物的具体尺寸,然后结合距离信息,调整园林修剪机械的位姿和状态,为了提高测量精度,还需要使用激光放大器。

图4 激光测距原理图Fig.4 The schematic diagram of laser ranging
如图5所示:激光信号能量主要集中在一定的频带范围内,在实际使用时,可以根据障碍物可能的尺寸,选用合适的信号放大器。
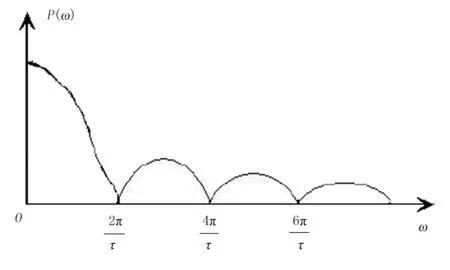
图5 激光信号功率谱密度Fig.5 The power spectral density of laster signal
图6为园林修剪机械激光自适应移动转向原理的框架结构图。园林修剪机械的移动和避障主要依据激光雷达的测距和扫描获取障碍物的信息,然后通过地图坐标和自身位置坐标的测试,预测自身距离。通过获取的障碍物距离和特征尺寸信息,园林修剪机械通过调整转向和移动距离,躲避障碍物,并实现自主转向和换行功能。
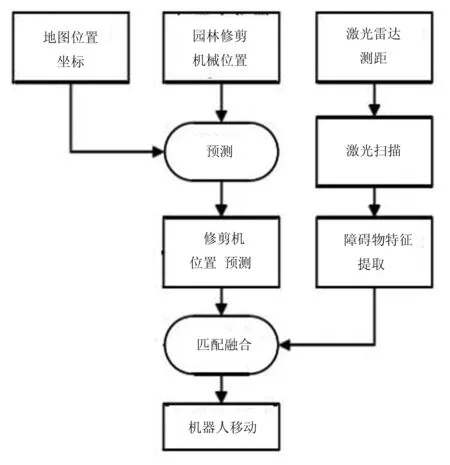
图6 园林修剪机械激光自适应移动转向原理Fig.6 The principle of laser adaptive moving steering in garden pruning machine
3 修剪机械自适应移动转向性能测试
为了验证激光传感器在自适应移动转向性能上使用的可行性,首先对基于激光传感器的自适应移动转向装置进行了实验测试,测试仪器主要分为PC机和激光发射与接收装置,如图7所示。当前方出现障碍物时,通过激光扫描,PC机对障碍物的距离和尺寸信息进行自动识别,从而判断出需要移动的距离和转向的角度。通过激光扫描得到的环境数据如图8所示。

图7 激光测距移动转向测试Fig.7 The mobile steering test of laser ranging

图8 激光扫描得到的数据Fig.8 The data obtained by laser scanning
利用PC机可以对数据进行最小二乘法拟合,利用拟合特征曲线可以得到障碍物的特征信息。由扫描数据可知,该设备可以有效地对环境进行扫描,得到障碍物的相关尺寸数据,其使用在园林修剪机械设备上进行自适应移动和转向导航是可行的。
将自主移动转向导航设备安装在园林修剪机上作进一步的测试(见图9),为了验证激光传感器自动作业机成功避障转向率与传统园林修剪机相比较的优势,进行了多次实验对比,得到了如表1所示的结果。

图9 园林修剪机自动作业测试Fig.9 The automatic work testing of garden pruning machine表1 园林修剪机自适应移动转向作业性能测试 Table 1 The performance test of adaptive shift steering for garden pruning machine
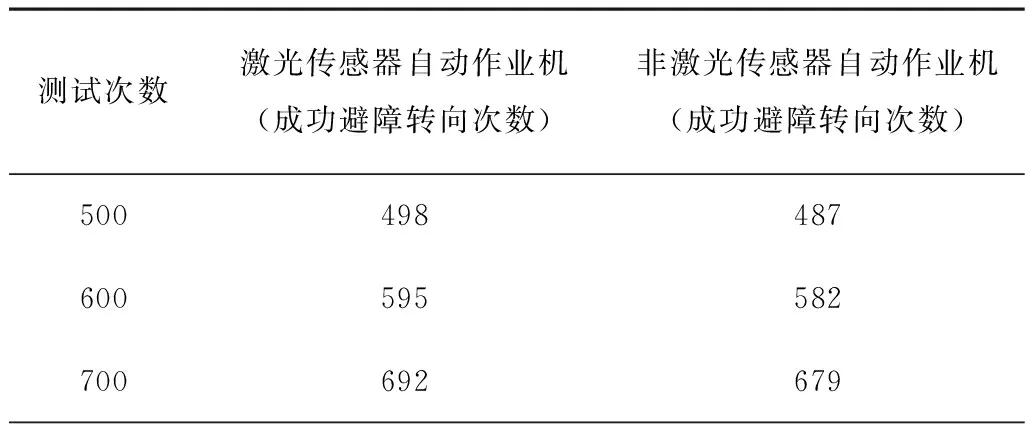
测试次数激光传感器自动作业机(成功避障转向次数)非激光传感器自动作业机(成功避障转向次数)500498487600595582700692679
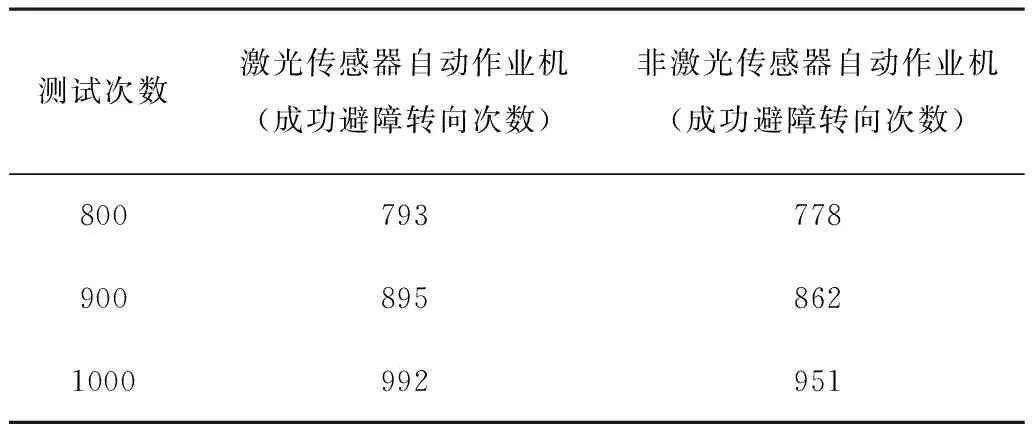
续表1
由表1对比结果可以发现:采用激光传感器自适应移动转向的修剪作业机,其成功避障的次数要明显高于非激光传感器,且随着测试次数的增加,其稳定性好,满足园林修剪机械自主导航的设计需要。
4 结论
将激光传感器引入到了园林修剪机械定位导航系统中,并设计了自适应移动和转向方案,通过激光测距和障碍物特征扫描,实现了修剪机械的自动化定位、避障和换行等作业能力。根据激光测距和扫描原理,设计了激光传感器自适应移动和转向装置,并通过试验验证了作业环境的激光扫描功能。最后,对激光传感器自适应移动和转向的精度进行了测试,并将其与传统的导航定位装置进行了对比。测试结果表明:采用激光传感器自主移动和转向系统,成功避障的准确性和稳定性都有所提高,可以满足园林修剪机械的作业需求。
[1] 王海青,姬长英,顾宝兴,等.基于机器视觉和支持向量机的温室黄瓜识别[J].农业机械学报,2012,43(3): 163-167.
[2] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12): 165-170.
[3] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68,112.
[4] 高春城.我国农业发展的资源环境问题与展望[J].当代生态农业,2013,3(4):151-154.
[5] 万宝瑞.当前我国农业发展的趋势与建议[J].农业经济问题,2014,4(1):110-114.
[6] 徐茂,邓蓉.国内外设施农业发展比较[J].北京农学院学报,2014,29(2):75-79.
[7] 刘峰.脉冲半导体激光测距机的研制与应用[J].红外与激光工程,2003:32(2)118-122.
[8] 彭宇,苏弘,董成富.一种适用于高速窄脉冲的峰值保持电路[J].核电子学与探测技术,2007,27(2): 254-256.
[9] 冯国旭,常保成.高精度激光测距技术研究[J].激光与红外,2007,37(11):1137-1140.
[10] 孙杰,潘继飞.高精度时间间隔测量方法综述[J].计算机测量与控制,2007,15(2):145-148.
[11] 周武林,岳永坚.基于时幅转换插入法的脉冲激光测距[J].光电工程,2008,35(7):104-115.
[12] 余冬菊,苏玉萍.基于 FPGA 的数字 TDC 设计[J].中国科技信息,2008,(8):122-123.
[13] 张延,黄佩诚.高精度时间间隔测量技术与方法[J].天文学进展,2006,23 (1):12-14.
[14] 雷武虎,刘松秋.一种高精度大范围时间测量电路的实现[J].核电子学与探测技术,2004,24(5):449-452.
[15] 王艳,唐秀芳.基于昆虫协作机理的分布式无线传感器网络节能方法[J].南京理工大学学报,2013,37(6): 826-832.
[16] 张迎胜,单志龙.线性回归在无线传感器网络定位中的应用研究[J].小型微型计算机系统,2014,35(7): 1500-1504.
[17] 赵景堂,杜国明,李秀海.基于总体最小二乘法的二维坐标转换方法[J].黑龙江工程学院学报,2015,29(1): 21-22.
[18] 陈荣,管吉兴,张喜明.数字Costas环的设计与实现[J].无线电工程,2010,40(3):24-26.
[19] 孙言强,王晓东,周兴铭.无线网络中的干扰攻击[J].软件学报,2012,23(5):1207-1221.
[20] 何文清,严昌荣,刘爽,等.典型棉区地膜应用及污染现状的研究[J].农业环境科学学报,2009,28(8): 1618-1622.
[21] 王学农,史建新,郭俊先,等.悬挂式棉秆粉碎还田搂膜机搂膜机构的设计与试验研究[J].农业工程学报,2008,24(1):135-140.
[22] 方磊.我国棉田生态污染及其防治对策[J].安徽农学通报,2007,13(12):56-58.
[23] 任淑英,徐林芳,马中启,等.残膜回收机在皇宫镇的推广应用[J].农业农机化,2007(4):15.
[24] 高杰.残膜回收机发展现状及存在问题[J].农业机械化,2007(4):180-189.
[25] 刘成莲.残膜回收技术的研究与分析[J].农业技术装备,2009(12):20-21.
[26] 许斯军,曹奇英.基于可视图的移动机器人路径规划[J].计算机应用与软件,2011(3):220-222.
[27] 尹建军,武传宇,YangSimonX,等.番茄采摘机器人机械臂避障路径规划[J].农业机械学报,2012(12):171-175.
[28] 姬伟,程风仪,赵德安,等.基于改进人工势场的苹果采摘机器人机械手避障方法[J].农业机械学报,2013(11):253-259.
[29] 周芳,朱齐丹,赵国良.基于改进快速搜索随机树法的机械手路径优化[J].机械工程学报,2011(11):30-35.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年9期)2021-11-02
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
泰山学院学报(2019年6期)2020-01-14
创新作文(1-2年级)(2019年4期)2019-10-15
制导与引信(2017年3期)2017-11-02
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24