
基于Android的UAV低空巡航航迹管理系统
2018-03-23 06:32马书敏
自动化与仪表 2018年3期
马书敏,李 娜
(山东科技大学 电子通信与物理学院,青岛 266590)
无人飞行器UAV是一种由预编程序操纵的无线电遥控设备控制的无人驾驶的飞行器,由于其具有成本低、反应灵敏、受外界环境影响低、可操作性强等特点,因而被广泛应用于军事、环境监测、智慧农业、矿产资源勘测等许多领域[1-3]。无人飞行器(无人机)主要包含飞行控制系统和地面管理系统。其中,管理系统不仅完成轨迹规划、导航控制、准确地向无人机发送飞行指令和定位操作,还需要实时显示无人机当前的位置和状态信息[4-7]。
无人飞行器通过无线方式与地面站点通信,飞行高度较高、巡航距离远的UAV通常采用专用通信方式[8-9],而低空飞行、距离较近的UAV有的采用专用的通信方式,有的则利用移动通信的GPRS或3G,4G网络[10-11]。考虑成本和链路带宽,在此利用地面WiFi网络与UAV进行实时通信,通过由机载GPS得到的UAV位置信息实时更新地图上的地理位置,在百度地图上实现实时显示UAV的当前位置,以便观测UAV的飞行状态。同时,为了便于后期查看无人机的飞行轨迹,方便数据重建、场景重现的验证,将无人机的飞行轨迹信息即经纬度信息,通过WiFi网络保存在数据库SQLite中,通过调用SQLite数据库函数,实现无人机轨迹的回放。
1 地面管理系统总体设计
无人机低空巡航系统结构如图1所示。无人飞行器的航迹为预设航迹 (或人工遥控),通过地面WLAN站点接入局域网,地面控制系统通过WLAN获取来自UAV的视频、图像及位置信息,并上传控制信息到无人飞行器。飞行器的地面管理系统目的是与机上系统建立联系,控制飞行器的飞行走向,并及时地返回飞行数据。

图1 UAV巡航系统结构Fig.1 UAV cruise system architecture
地面管理系统的设计框架如图2所示。整个地面管理系统无人机分为无线通信模块、数据采集模块、图像和视频传输模块、电子地图模块、数据存储模块5大部分。

图2 地面管理系统的系统框架Fig.2 System framework of ground management system
2 航迹管理子系统
作为巡航无人机地面管理系统的重要组成部分,航迹管理子系统主要完成轨迹规划、航迹显示、场景重现等。航迹显示由地面管理系统的航迹显示系统部分完成。其中,机载控制系统通过数据链路通信模块(WiFi模块)与移动控制终端系统直接连接或通过WiFi网络AP进行连接,通过数据链路,将自身的信息或者摄像机已经拍摄或携带的图像、影像、位置、时间等信息在客户端展示。
当移动终端与无人机通过WiFi建立连接之后,无人机将GPS模块接收到的无人机的位置信息(即无人机的经纬度信息)提取出来,经过无线通信模块传输到移动终端,卫星利用导航数据进行定位,在电子地图上准确显示,并记录航迹。由此可将航迹管理子系统分为无线通信模块、数据存储模块、电子地图模块3部分,其具体设计如图3所示。
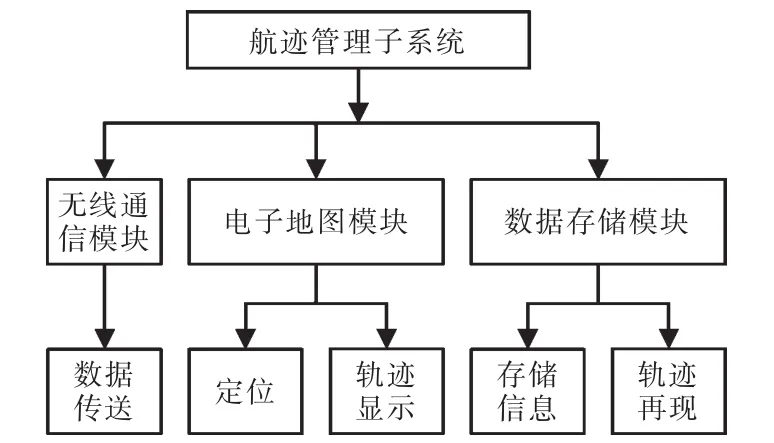
图3 航迹管理子系统Fig.3 Track management subsystem
3 航迹显示与存储
航迹的显示使用了Android移动终端调用百度地图。首先搭建Android开发平台,下载安装JDK,Eclipse,ADT及Android SDK,并对其中的开发包进行配置,根据百度地图API所提供的开发实例,配置开发百度地图所需的环境与权限,管理地图生命周期,最终成功完成调用百度地图显示航迹的功能。
数据回放模块用于后期查看或者离线条件下观察无人机的运行轨迹,重现无人机的飞行过程。无人机航迹回放需要在数据库中读取数据,利用SQLite建立小型数据库,完成数据查询的工作。航迹回放时要首先选定回放的时间,然后调用函数开始在数据库中进行查询。
4 系统测试
测试地点选在山东科技大学校园若水园南侧的道路和草坪,测试现场如图4所示。
UAV采用六旋翼无人机,其微控制系统模块主控芯片选用STM32F407VG系列单片机,飞行姿态检测模块采用MPU6050芯片。为更好地检验航迹实时显示性能,共进行了3次测试,前2次采用人工遥控飞行的方式,最后1次采用预设航迹方式。图5为无人机实时回传视频的截图。

图4 测试现场Fig.4 Test site

图 5 无人机回传的视频截图Fig.5 UAV return video capture
无线数据传输选用NRF 24L01通信芯片,GPS模块采用瑞士UBLOX公司的UBLOX-6M模块,其位置信息与飞行控制信息显示如图6所示。

图6 信息显示Fig.6 Information display
图7为第2次测试实时飞行航迹在百度地图上的显示。无人机轨迹回放的结果与图7相同。
5 结语
设计了基于Android智能移动终端的无人飞行器航机管理系统,在WiFi网络和Socket通信协议下,对无人机进行位置追踪,在百度地图上实现航迹显示与回放,实时并准确地显示无人机位置,并利用SQLite数据库对无人机的飞行数据进行存储,在需要的时候进行轨迹的回放。该软件已在Android智能移动终端上进行了安装测试,使用结果表明:该软件能够实时、准确地显示无人机的航迹;由于采用Java语言编写,因此软件具有很好的通用性和扩展性,可用于不同的无人机。

图7 电子地图轨迹显示Fig.7 Trajectory display of electronic map
参考文献:
[1]史一凡,孙健,胡昊.基于无人机技术的低空海洋溢油监测巡航路径[J].中国航海,2014,37(1):136-140.
[2]李怀亮,唐红霞.基于北斗导航的智能无人机喷淋系统[J].自动化技术与应用,2016.35(8):80-83.
[3]张波,罗锡文,兰玉彬,等.基于无线传感器网络的无人机农田信息监测系统[J].农业工程学报,2015,31(17):176-182.
[4]李怀涛,唐道光,刘大卫,等.基于Qt的无人机综合管理系统设计与实现[J].电子设计工程,2016,24(8):75-79.
[5]刘洋,马丽娜,刘磊.无人机地面站飞行监控系统软件设计[J].计算机测量与控制,2014,22(1):294-296.
[6]赵跃,祖家奎.无人机飞行综合数据管理软件设计及实现[J].伺服控制,2012,9(4):47-49.
[7]Luca Damilano,Giorgio Guglieri,Fulvia Quagliotti,et al.Ground control station embedded mission planning for UAS[J].Journal of Intelligent&Robotic Systems,2013,69(1):241-256.
[8]安建欣,何晓垒,杨乾远,等.小型无人机空地无线激光通信的应用研究[J].光通信技术,2017,41(6):10-13.
[9]王鹏宇.无人机高速DS/FH混合扩频通信系统关键模块设计[J].飞行器测控学报,2016,35(4):301-308.
[10]欧阳秋萍,李杰,沈林成.考虑3G/4G网络特性的多无人机环保监测任务调度[J].计算机应用,2016,36(3):871-877.
[11]张佳.基于无线通信网络的无人机监控系统设计[J].自动化与仪表,2017,32(5):22-25.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
Defence Technology(2020年4期)2020-07-02
青年歌声(2019年12期)2019-12-17
电子制作(2018年2期)2018-04-18
青年与社会(2018年2期)2018-01-25
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
中国医学人文(2015年6期)2015-06-08
小朋友·快乐手工(2015年5期)2015-06-06
舰船科学技术(2015年8期)2015-02-27
