
基于电磁传感阵列的输电线路探测与跟踪方法
2018-03-21 02:49吴国松倪宏赵海丽陈京
综合智慧能源 2018年2期
吴国松,倪宏,赵海丽,陈京
(国网河南省电力公司许昌供电公司,河南 许昌 461000)
0 引言
目前,取代人工巡线的主要方法是采用无人机巡检作业,包括遥控巡检飞行和自主避障跟踪巡检飞行2种作业方式,无人机在线路巡视中需要解决的主要问题是[1-2],具体飞行任务、起降位置坐标、续航时间有限、应对突发特请、姿态与高度监控、路径选择、超限返航等[3-4]。关于姿态调整问题和返航问题目前已经有比较成熟的解决方案,主要问题在于线路识别与线路选取。巡检作业要求飞行器与输电线路保持合理的距离和相对位置,方便、可靠的线路跟踪、避障技术等,所以,设计提供一种由无人飞行器搭载的,能够自动识别输电线路空间位置,进而为飞行器提供导航、跟踪、控制信号的空中跟踪传感装置,以实现飞行器的避障、自动跟踪巡线飞行功能,具有非常广阔的市场前景[5-6]。
1 系统总体架构与控制策略
系统由被动式阵列磁感应天线装置、阵列扫描与采集控制电路、姿态与距离数据处理器3部分组成,被动式阵列磁感应天线装置与后续控制、信息处理环节的关系如图1所示。

图1 检测与跟踪方法原理框图
基于距离输电线路越近,磁场强度越大的基本原理[7-8],被动式阵列磁感应天线装置采用由螺旋管电感线圈组成n×m矩阵型电磁场传感阵列,作为输电线路沿线空间磁场感知装置,根据输电线路空间敷设走向(通常是平行于地面),传感阵列平面与输电线保持平行且垂直于地面,该位置状态由飞行器的姿态控制系统实现。依据输电线路的特定电压等级以及飞行器的空间坐标(飞行器自带卫星定位接收机),实时感知输电线的存在与否,感知飞行器相对输电线的距离信息和位置角度信息,为后续信号处理电路提供判别依据。阵列扫描与采集控制电路按照一定方式控制n×m矩阵型电磁场传感阵列,可逐点扫描、逐行扫描、逐列扫描等,实现快速扫描驱动和信号采集,并将信息传输给后面的姿态与数据处理器。姿态与距离数据处理器按照特别设计的快速数据处理算法,通过数字滤波、曲线拟合算法处理,解算出姿态参数、距离参数并实时传送至机载飞空系统,用于调整飞行器的飞行轨迹,实现对输电线路的自动跟踪与避障飞行。
高压输电线路通常沿与地面平行方向架空敷设,依据电压等级不同,线路与地面的距离是固定的某确定值(斜坡、丘陵地带也是如此)。传感阵列组件与阵列扫描与采集控制器之间还包含有稳压电路、谐振采样电路、滤波调理电路、高速模数转换电路等,系统控制电路原理如图2所示。
2 输电线路探测与巡线方法
被动式阵列磁感应天线采用10×10阵列,阵列扫描与采集和姿态与距离数据处理分别由2个处理器承担,扫描与采集处理器进行本周期扫描与采集控制的同时,数据处理器进行上一周期的数据处理,以提高系统的响应速度,实现满足飞行器飞控要求的实时信息输出。针对输电线路50 Hz交流电产生的磁场,将电感线圈感应产生的50 Hz电压信号进行4倍频处理,由高速模数转换器进行高速转换、存储并提取幅值参数,理论计算完成100个单元的驱动与采集不超过500 ms,包括数据解算处理耗时在内可实现每秒2次输出数据的刷新,完全满足巡线无人机对线路或设备跟踪和避障的飞控要求。
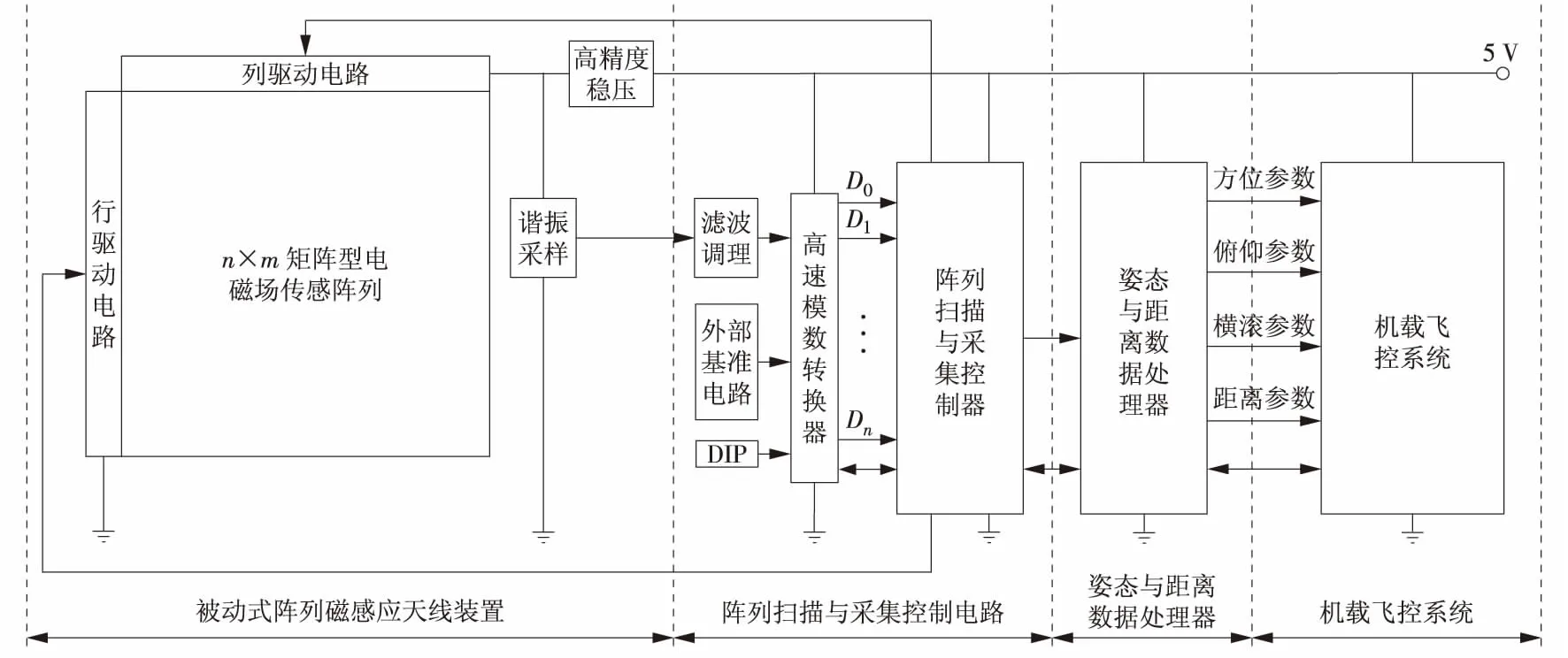
图2 系统控制原理
每个扫描采样周期所采集存储的数据组,在本周期的最后阶段通过高速串口传输给姿态与距离数据处理器,处理器根据本周期的数据按照设计算法解算出方位、俯仰、横滚、距离等参数,并实时传输给机载飞控系统。
如图3a所示,距输电线x距离P点的磁场分布由下式确定
(1)
对于无限长输电线有
(2)
式中:B为磁感应强度;μ0为真空磁导率;I为电流;Im为电流最大值;ω为角速度;t为时间。
P点处电感为L的线圈产生的感应电动势
ε=NSB=NSBmcosθsin(ωt)=
εmcosθsin(ωt) ,
(3)
式中:N为线圈匝数;S为线圈横截面积,与线圈自感L有关;θ是磁感应强度B矢量方向与线圈轴线的夹角,且与线圈在磁场中的姿态位置有关;Bm为最大磁通量;εm为最大磁感应强度。故有
ε∝LBmsin(ωt)∝L/x。
(4)
当频率、电感一定时,电感两端产生的感应电动势反比于距离x。距输电线x距离P点的磁场分布如图3b所示。依据传感阵列各单元的检测数据,可以构建出输电线路与传感阵列间的相对位置关系(方位角α、俯仰角β、横滚角γ)与距离参数(x)。

图3 路径选择示意
3 总结
系统在ARM系列的STM32F104硬件平台上搭建完成,并与八旋翼无人机飞控系统进行了集成,本系统以2次/s的刷新速度向无人机飞空系统提供姿态、距离信息,在无人机沿输电线路巡航限定速度小于2次/s的情况下,针对220 kV输电线路进行了限制接近距离为7 m的测试飞行试验。试验结果表明,无人机能够保持水平距离在5.5~8.5 m,高度误差在±1.2 m的范围内稳定飞行,自动飞行效果要优于自稳飞行,获得了较满意的效果。
[1]张柯,李海峰,王伟.浅议直升机作业在我国特高压电网中的应用[J].高电压技术,2006,32(6):45-46.
[2]陈晓兵,马玉林,徐祖舰.无人飞机输电线路巡线技术探讨[J].南方电网技术,2008,2(6):59-61.
[3]姜强,曾勇,刘强,等.四旋翼飞行器姿态航向参考系统设计与实现[J].控制工程,2013,20(S1):167-169,172.
[4]柳煌,夏学知.无人机航路规划[J].舰船电子工程,2008,28(5):47-51.
[5]JONESDI.Anexperimentalpowerpick-upmechanismforanelectricallydrivenUAV[C]//IEEEInternationalsymposiumonindustrialelectronics.IEEE,
2007:2033-2038.
[6]CHEE K Y, ZHONG Z W. Control, navigation and collision avoidance for an unmanned aerial vehicle[J].Sensors and actuators A: physical, 2013,190(1):66-76.
[7]林韩,詹仁俊,汤明文,等. 一种适用于山区电网巡检的专用无人机避障系统及其工作流程:201210514548.9[P]. 2012-12-05.
[8]王群,李永卿,陈静,等.110 kV高压输电线路电磁场分析及评价[J].北京工业大学学报,2005,31(3):308-312.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
传感器世界(2022年6期)2022-11-25
无线电工程(2022年10期)2022-10-24
智慧电力(2022年1期)2022-03-02
传感器与微系统(2022年2期)2022-02-28
科技研究·理论版(2021年4期)2021-09-10
河南电力(2020年5期)2020-05-22
无人机(2018年1期)2018-07-05
中南民族大学学报(自然科学版)(2015年2期)2015-12-16
中学生数理化·高二版(2008年6期)2008-11-12
