基于模糊人工势场法的智能全向车路径规划
2018-03-19 02:45韩伟孙凯彪
计算机工程与应用 2018年6期
韩伟,孙凯彪
大连理工大学控制科学与工程学院,辽宁大连116024
基于模糊人工势场法的智能全向车路径规划
韩伟,孙凯彪
大连理工大学控制科学与工程学院,辽宁大连116024
CNKI网络出版:2017-07-19,http://kns.cnki.net/kcms/detail/11.2127.TP.20170719.1123.042.html
1 引言
路径规划是服务类机器人研究领域的一个重要方向,其目的在于为机器人局部路径规划寻找恰当的行驶路径,尤其在巡航和危险任务等方面的应用更加广泛[1]。路径规划的研究与应用可以解决服务类机器人在复杂环境下的安全行驶难题。关于路径规划的研究大致可分成两个方向:(1)在已知环境信息情况下进行全局路径规划;(2)在未知或者部分未知环境信息情况下进行局部路径规划[2]。根据以往的研究,路径规划主要用到了遗传算法[3]、蚁群算法[4]、模糊神经网络算法[5]以及人工势场法[6-7]等。人工势场法(Artificial Potential Field)相较于其他算法的主要优势在于其容易掌握,便于底层实现以及能够对未知环境的改变作出及时调整。因此,人工势场法在服务类机器人路径规划中得到了较为广泛的研究和应用。鉴于传统人工势场法在复杂环境中的不足,很多学者对其进行了改进研究[8-9]。当面对复杂障碍物,尤其是目标点附近分布复杂障碍物时,移动机器人容易产生剧烈震荡,或者陷入局部最小点,进而导致机器人无法正常行驶。针对于上述现象,文献[10-11]采用了模糊人工势场法对斥力参数或者其他参数做出模糊决策。但是这些研究没有综合考虑位置信息的变化,未能完全克服机器人剧烈震荡问题。基于以上考虑,本文提出了一种基于模糊人工势场法的动态路径规划方法,在动态环境下,机器人可对运动控制参数综合决策,动态改变虚拟力的大小,方向以及机器人的运行速度。结果表明,机器人运动轨迹更平滑,成功避免了路径规划过程中的震荡问题。
2 人工势场法及改进方案
2.1 人工势场法
Khatib最早提出利用虚拟力来解决路径规划问题,人工势场法因此诞生。人工势场法主要是将移动机器人所处的环境信息模拟成虚拟势场,其中引力势场由目标点作用于机器人,斥力势场由所有的障碍物产生。机器人在引力场的作用下不停地向目标点移动,同时环境中障碍物所产生的斥力场作用于机器人,使其能够避开周围的障碍物,最移动机器人绕开障碍物安全到达目标点。机器人人工势场虚拟力作用如图1所示。

图1 机器人人工势场虚拟力分析
在人工势场法路径规划过程中,规定引力的大小与机器人和目标点的距离成正比,机器人离目标点越远引力作用越明显。相反,机器人距离障碍物的距离越近,所产生的斥力越大。当机器人距离目标点越近,机器人受到的引力越小,引力势能也随着距离的缩小而减小,当引力势能减小为零,引力为零时,机器人到达目的点。当机器人距离障碍物在斥力作用范围以外时,不考虑斥力对机器人的影响,当距离进入斥力作用范围以内时,距离越近斥力势能越大,斥力越大。
为了方便人工势场法描述,记X为机器人当前位置,Xg是目标点位置,k是引力势场常数,则目标点对机器人的引力势函数为:

这里d(Xr,Xg)表示机器人和目标点之间的欧几里德距离。

根据物理学势场关系得到引力函数为:机器人斥力处理方式与此相似,记Xo为障碍物位置,m为斥力势场常数,障碍物斥力场的最大影响范围假设半径为p的圆环,当障碍物大于p时,障碍物不受斥力的影响,因此斥力势函数为:
这里d()Xr,Xo表示机器人和障碍物之间的欧几里德距离。
机器人所受斥力为斥力场的负梯度方向,斥力函数表示为:
机器人虚拟势场中受到的合力表示为:

这里n表示机器人在当前位置受到障碍物斥力影响的个数。
2.2 人工势场法局限性及其改进
针对人工势场法在复杂环境中容易陷入局部最小点或者产生剧烈震荡等局限性,可通过引入新的斥力函数或增加新的虚拟障碍物的方法进行改进。然而引入新的斥力函数、改变斥力影响,虽然能够在简单环境下避免机器人陷入局部最小点,但是机器人面对大范围“雷区式”的可穿越障碍物时,可能无法抵达目标点。增加新的虚拟障碍物,虽然可以解决简单的绕路问题,但是环境信息太过复杂,新增的虚拟障碍物和原始斥力发生冲突,过度改变行驶路径,导致机器人在复杂密集障碍物中震荡。机器人通过模糊决策选择恰当的参数,避免复杂环境中陷入局部最小点或者产生剧烈震荡的现象。
2.3 人工势场法的模糊决策
传统的人工势场法,机器人受到的虚拟力参数是恒定值,没有考虑相对位置比例尺的动态改变。移动机器人通过模糊决策对斥力常数或者引力偏角,以及行驶速度都做出调整,改进后的算法可以帮助机器人有效地脱离障碍物的危险范围,降低移动机器人实际运动过程中的震荡效果,防止机器人陷入局部最小点[12-13]。
如图2所示,机器人位于A、B、C三点时,人工势场法相应的参数需要根据相对比例尺变化,并且根据周围环境信息调整行驶姿态。机器人在A点附近时,相对障碍物和机器人都是较远的位置,此时斥力常数较小,同时引力偏转角度为零,机器人在安全区域内以正常速度行驶;机器人处在B点时,通过对机器人、障碍物、目标点模糊决策,斥力常数变大,引力偏转角度依旧为零机器人在障碍物影响范围内以正常速度行驶;当机器人处在C点时,机器人自身位置相对较为危险,模糊决策根据机器人反馈的决策信息判断引力偏转角度,降低行驶速度,以便更好脱离危险范围。整个路径规划过程中,模糊决策对运动方向和速度的改变均由模糊规则库决定,机器人通过隶属函数得到机器人的斥力参数、引力偏转角以及机器人行驶速度。
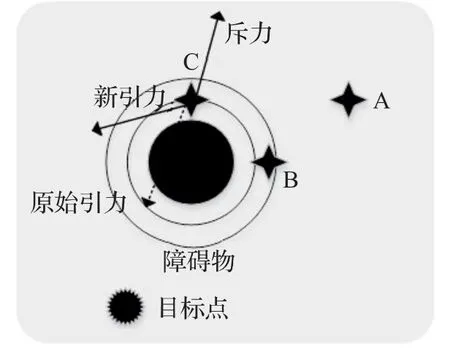
图2 机器人模糊处理分析
2.3.1 斥力场系数的模糊决策
机器人根据位置信息变化,通过双输入单输出的模糊控制器调整斥力场的斥力常数。斥力常数没有精确的计算公式,但是机器人在环境中不同位置,斥力常数必须做出相应的调整,根据专家经验得出的模糊规则库可以有效解决参数决策[14-15]。
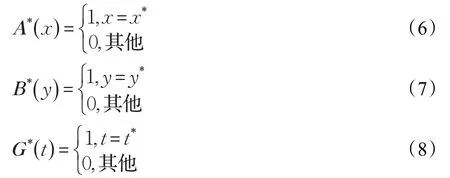
x和y分别采用单值模糊法方法进行模糊化。以x为例,单值模糊化就是将一个实值点x*∈X转化为X上的单点模糊集A*,A*在x*上的隶属度为1,在X上其他点的隶属度值为0。公式(6)~(8)分别为x,y,t单值模糊化后的隶属度函数:
去模糊化选取中心去模糊化方法,如式(9)所示:

这里zi∈Z,C*为经推理得到的模糊集。模糊控制原理图如图3所示。
斥力常数模糊决策规则库如表1所示,表1内的数值是输出论域上模糊集斥力常数Cm(m=1,2,…,5)的峰点。
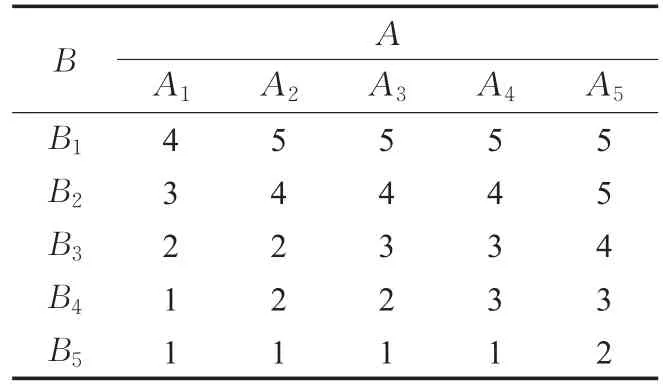
表1 斥力常数模糊决策规则库
这里Ai(i=1,2,…,5)是论域X上的模糊集,表示机器人到障碍物之间的距离,依次表示“很近、较近、适中、较远、很远”等语言值;Bj(j=1,2,…,5)是论域Y上的模糊集,表示障碍物到目标点之间的距离,依次表示为:“很近、较近、适中、较远、很远”等语言值;Gj(j=2,4,…,10)是论域T上的模糊集,表示机器人到目标点之间的距离,依次表示为:“很近、较近、适中、较远、很远”等语言值。
以斥力常数为例进行模糊推理,斥力常数模糊推理采用取小原则,对于任意的x*∈X,y*∈Y推理结果为:
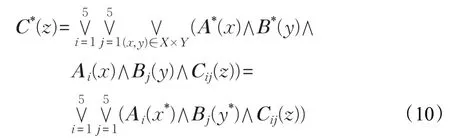
将式(6)、(7)表示的模糊化方法带入上式,并将得到的结果用式(9)所表示的去模糊化方法去模糊,得到的结果为:
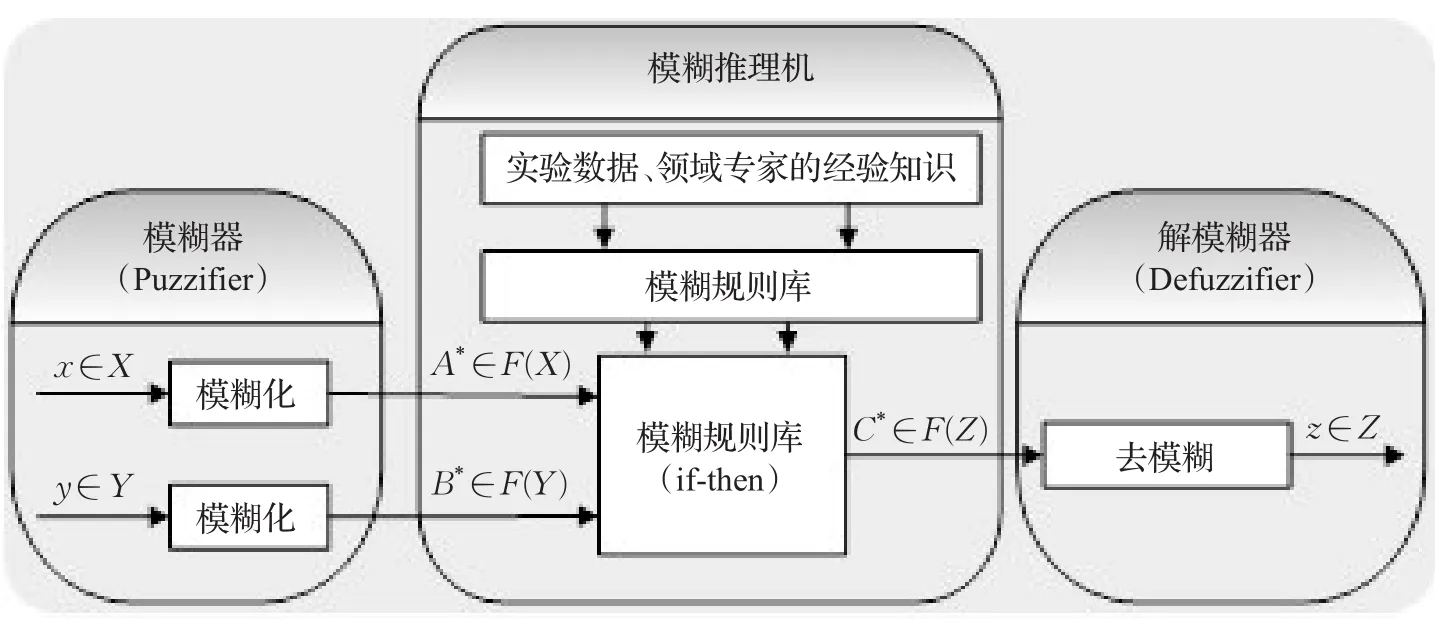
图3 模糊控制原理图

特别的,记xk(k=1,2,…,n),yl(l=1,2,…,m)分别表示模糊划分Ai(i=1,2,…,n),Bj(j=1,2,…,m)的峰值,则
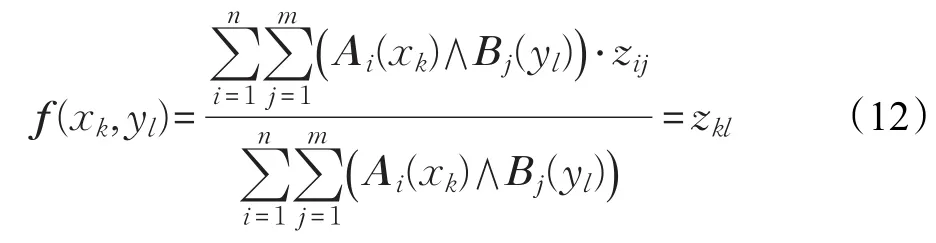
这里zkl为规则库中Ai(i=k)和Bj(j=l)所对应的峰值。
如图4所示为斥力常数模糊推理观察界面。
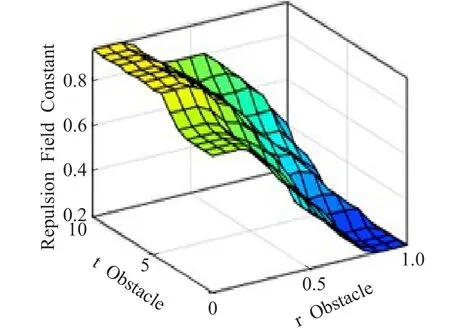
图4 斥力常数模糊推理观察界面
2.3.2 引力偏转角度的模糊决策
如图2所示,机器人在相对障碍物很近的情况下,引力方向依旧为初始规定,机器人的位姿调节容易产生震荡或陷入极小值点,此时机器人应该根据环境信息的相对比例尺对引力方向施加偏转角度。机器人通过双输入单输出的模糊控制器调整引力偏转角度。引力偏转角度主要是由机器人到障碍物的距离和机器人到目标点的距离决定。
引力偏转角度模糊决策规则库如表2所示,表2内的数值是输出论域上模糊集引力偏转角度Rm(m=0,15,…,90)的峰点。
图5是引力偏转角度模糊推理观察界面。
2.3.3 行驶速度的模糊决策
工程应用中,机器人的行驶速度一般是恒定值或者保持微小变化。但是,如图3所示,机器人在相对障碍物很近的情况下,根据周围环境信息自主调节行驶速度,在保证安全的同时,减小位姿调节的幅度。行驶速度通过机器人到障碍物的距离和机器人到目标点的距离作为输入的模糊控制器决定。
行驶速度模糊决策规则库如表3所示,表3的数值是输出论域上模糊集行驶速度变化系数Km(m=0.2,0.4,…,1)的峰点。
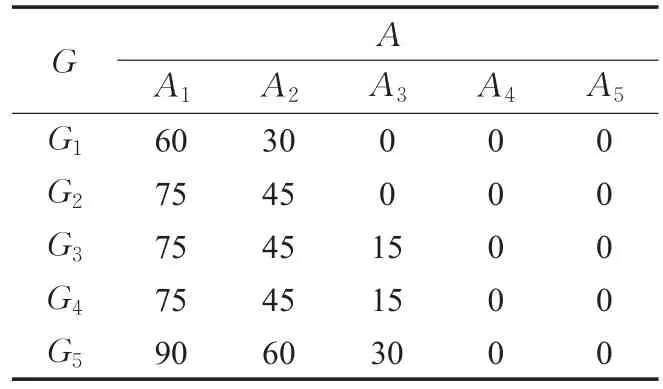
表2 引力偏转角度模糊决策规则库

图5 引力偏转角度模糊推理观察界面
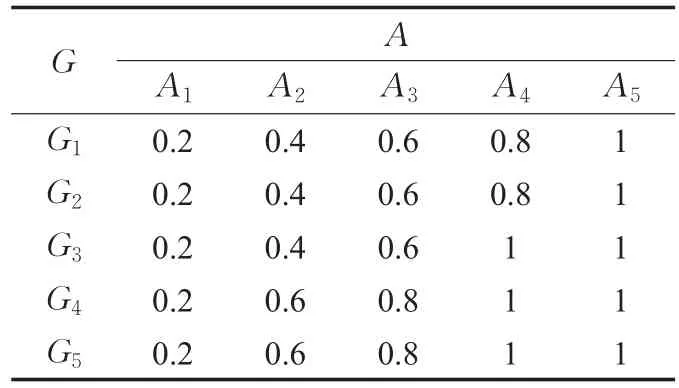
表3 行驶速度模糊决策规则库
图6是机器人行驶速度模糊推理界面。
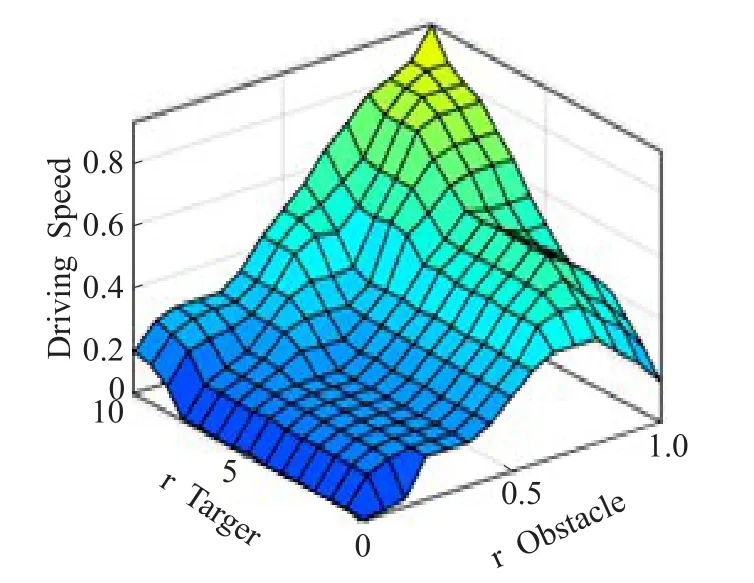
图6 行驶速度模糊推理观察界面
3 模糊人工势场法的应用
3.1 智能全向车平台
图7是处于路径规划中的智能全向车,智能全向车所用激光扫描测距仪为URG-04LX 2D,激光扫描测距产品拥有4 m,240°测量范围,DC5V输入,100 ms扫描时间,可用于机器人避障和位置识别。智能全向车通过激光传感器以及定位导航算法记录环境信息,然后机器人根据模糊人工势场法实现运动控制、路径规划。

图7 路径规划中的智能全向车
3.2 模糊人工势场法的仿真验证
模糊人工势场法路径规划算法在Matlab平台上进行仿真验证,并且将仿真结果与以往改进的人工势场法做比较。机器人在仿真模拟中以质点的形式存在,机器人的模拟运动环境是一个10×10的直角坐标系,模拟环境下的仿真结果如图8、9所示。
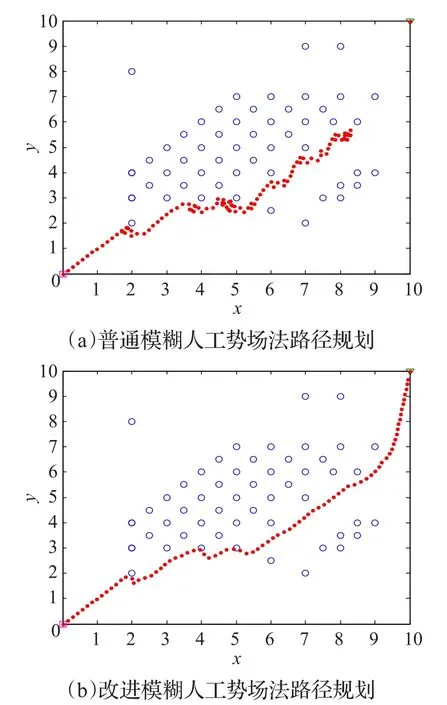
图8 密集多障碍物可穿越地形的路径规划
图8验证了密集多障碍物可穿越地形的路径规划。图(a)是普通模糊人工势场法改进结果,图(b)是改进的模糊人工势场法仿真结果。图(a)在路径规划过程中,障碍物的密集程度过高,产生剧烈震荡,普通的模糊人工势场法始终把机器人前进的方向作为虚拟势场的引力方向,无法改变机器人的位姿状态,一旦陷入局部最小点,很难脱困,相比图(b),在行驶过程中,引力方向经过模糊决策,机器人可以自适应地调节自己的引力方向。
图9为典型的凹槽型障碍物环境,图(a)所示的普通人工势场法改进,图(b)所示为模糊人工势场法改进,该仿真验证了连续凹槽型障碍物的路径规划的有效性。传统的人工势场法改进在路径规划过程中遇到局部最小点,机器人容易产生震荡,而基于模糊决策的人工势场法在遇到局部最小点的时候,机器人可以轻松绕开周围的障碍物,到达目标点。
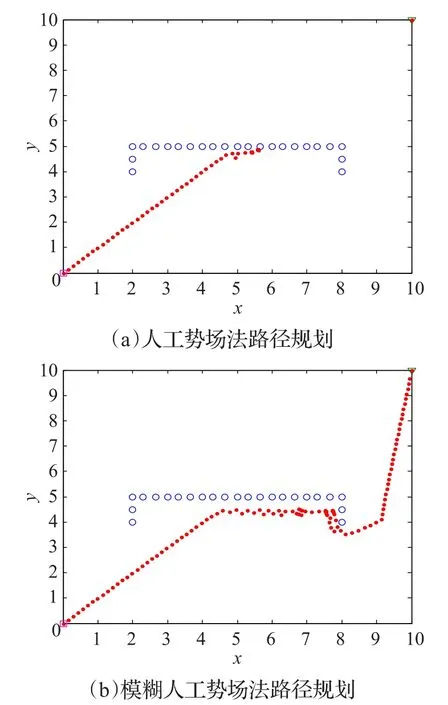
图9 凹槽状连续障碍物下的路径规划
4 结束语
针对于人工势场法路径规划中移动机器人容易产生震荡或者陷入局部最小点的问题,本文通过对势力场函数进行模糊决策,根据专家经验对比例尺变化做出相关处理,通过机器人、障碍物和目标点之间的距离,调整斥力场常数的模糊决策值、引力偏转方向以及行驶速度的模糊决策值。在改进后的人工势场法路径规划中机器人能够对虚拟势场做出自适应性和实时性调整,同时改变引力的方向和行驶速度,防止陷入局部最小点,最终使机器人能够准确安全的到达目标点。该方法在智能全向车路径规划中进行了实物验证,成功避免了智能全向车的震荡现象。
[1] Zhang Qiushi,Chen Dandan,Chen Ting.An obstacle avoidance method of soccer robot based on evolutionary artificial potential field[J].Energy Procedia,2012,16:1792-1798.
[2] 朱毅,张涛,宋靖雁.未知环境下势场法路径规划的局部极小问题研究[J].自动化学报,2010,36(8):1122-1130.
[3] Xu Wangbao,Chen Xuebo.Artificial moment method for swarm robot formation control[J].Science in China Series F:Information Sciences,2008,51(10):1521-1531.
[4] 裴振兵,陈雪波.改进蚁群算法及其在机器人避障中的应用[J].智能系统学报,2015,10(1):90-96.
[5] 魏权利,李丽萍,于竹林.模糊神经网络在嵌入式移动机器人避障中的应用研究[J].机床与液压,2010,38(17):51-54.
[6] Li Chenggang,Jiang Xiaobei,Wang Wuhong,et al.A simplified car-following model based on the artificial potential field[J].Procedia Engineering,2016,137:13-20.
[7] Kovács B,Szayer G,Tajti F,et al.A novel potential field method for path planning of mobile robots by adapting animal motion attributes[J].Robotics and Autonomous Systems,2016,82:24-34.
[8] 于振中,闫继宏,赵杰,等.改进人工势场法的移动机器人路径规划[J].哈尔滨工业大学学报,2011,43(1):50-55.
[9] 邓学强.基于改进人工势场法的移动机器人路径规划[J].山东理工大学学报:自然科学版,2014(1):38-41.
[10] Mbede J B,Huang Xinhan,Wang Min.Fuzzy motion planning among dynamic obstacles using artificial potential fields for robot manipulators[J].Robotics and autonomous Systems,2000,32(1):61-72.
[11] 孟蕊,苏维均,连晓峰.基于动态模糊人工势场法的移动机器人路径规划[J].计算机工程与设计,2010,31(7):1558-1561.
[12] Masmoudi M S,Krichen N,Masmoudi M,et al.Fuzzy logic controllers design for omnidirectionnal mobile robot navigation[J].Applied Soft Computing,2016,49:901-919.
[13] Samant R,Nair S,Kazi F.Development of autonomous humanoidrobotcontrolforcompetitiveenvironment using fuzzy logic and heuristic search[J].IFAC-Papers OnLine,2016,49(1):373-378.
[14] 李洪兴,彭家寅,王加银.常见模糊蕴涵算子的模糊系统及其响应函数[J].控制理论与应用,2005,22(3):341-347.
[15] 李洪兴,王加银,苗志宏.模糊控制系统的建模[J].中国科学:数学,2002,32(9):772-781.
HAN Wei,SUN Kaibiao.Research on dynamic path planning of fuzzy artificial potential field method.Computer Engineering andApplications,2018,54(6):105-109.
HAN Wei,SUN Kaibiao
School of Control Science and Engineering,Dalian University of Technology,Dalian,Liaoning 116024,China
Aiming at the problem faced in the traditional artificial potential field method that the robot cannot reach the target point due to the local minimum point in the path planning,a dynamic path planning method based on the fuzzy artificial potential field method is proposed by considering that the relevant parameters of the artificial potential field method are not constant in actual environment.The fuzzy decision is made by the expert’s experience,which is used to adjust the force magnitude and direction of the robot at each moment,and then deals with uncertainty of the repulsive force constant,the gravitational direction deviation angle and the robot speed.To verify the efficiency of the proposed method,it is applied to a four-wheel omni-directional robot platform and the results show that the motion trajectory of the robot is smoother and the oscillation problem is avoided successfully.
artificial potential field method;mobile robot;path planning;fuzzy decision;local minimum point
针对于移动机器人在传统人工势场法路径规划中易于陷入局部最小点而无法抵达目标点的问题,同时考虑到实际环境中人工势场法相关参数的不确定性,提出了一种基于模糊人工势场法的动态路径规划方法。借助于专家经验进行模糊决策,调整移动机器人在各个时刻的合力大小和方向,进而解决斥力常数、引力方向偏角以及机器人行驶速度的不确定性问题。为了验证该方法的有效性,在智能全向车平台进行了应用,结果表明,智能全向车运动轨迹平滑,避免了实际应用中的震荡问题。
人工势场法;移动机器人;路径规划;模糊决策;局部最小点
2016-10-13
2017-01-13
1002-8331(2018)06-0105-05
A
TP242.6
10.3778/j.issn.1002-8331.1610-0131
国家自然科学基金(No.61473327)。
韩伟(1991—),男,硕士研究生,研究领域为SLAM算法、移动机器人导航算法、路径规划,E-mail:hanw_kanni@sina.com;孙凯彪(1978—),男,博士,副教授,研究领域为生化反应过程建模、优化控制。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年4期)2021-11-24
汽车工程(2021年12期)2021-03-08
当代陕西(2020年15期)2021-01-07
成都信息工程大学学报(2019年3期)2019-09-25
北京汽车(2019年4期)2019-09-17
制造技术与机床(2017年3期)2017-06-23
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
第二课堂(课外活动版)(2015年4期)2015-10-21
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28