倾斜摄影测量技术在三维建模中的应用
2018-03-15 03:29刘本宁黄兵张陈锋
城市勘测 2018年1期
刘本宁,黄兵,张陈锋
(1.北京建筑大学测绘与城市空间信息学院,北京 100044; 2.现代城市测绘国家测绘地理信息局重点实验室,北京 100044)
1 引 言
传统的三维建模和低空摄影测量技术已经远远不能满足当下快速精细建模的要求。传统三维建模主要依靠二维的平面矢量图、正射影像图等数据为底图建立白膜,通过将高程数据和拍摄的纹理数据贴在白膜上来构建。由于传统的建模方法效率低,劳动强度大、生产成本高等缺点,将逐渐被淘汰。传统低空摄影测量技术,广泛应用在大面积区域调查、安全监测、灾害应急、环境保护等诸多领域。通过无人机搭载传感器,快速、高效、便捷地获取高分辨率影像数据,从而制作DOM(数字正射影像)和DEM(数字高程模型)。但是由于传感器和数据处理算法等软硬件的限制,并不能快速高效地还原最真实的三维场景。
无人机摄影测量具有灵活快速、高效便捷、成本较低、影像分辨率高等特点大大促进了倾斜摄影测量技术的发展。倾斜摄影测量彻底改变了人工建模的弊端,通过自动化的数据处理手段大大加快了大场景精细三维模型的生成速度。倾斜摄影测量技术也颠覆了传统低空摄影测量只能从垂直角度获取数据的局限,在无人机上同时搭载多个传感器,从多个角度获取影像数据,能够更加真实全面立体反映地表物体的局部细节和整体层次。利用倾斜摄影测量技术获取丰富的纹理信息数据,生成密集三维点云和TIN格网模型,结合自动化实景建模模型,实现三维场景的快速、高效、低成本的真实还原。
2 数据获取的主要流程
倾斜摄影测量主要有地面飞控系统、无人机、控制测量三个部分组成。飞控部分主要规划设计无人机的飞行航线、航高、以及对无人机飞行监视控制和数据通信等,无人机部分主要由机载定位系统和多视相机组成,控制测量主要是航测区域的控制网设计和像控点的测量。无人机航拍前需要对测区进行现场踏勘,首先根据已有GPS控制点位去合理布设像控点,像控点的数量和位置依据实际测量规程要求的精度和测区范围的大小均匀布设。其次根据申请的空域时间和范围合理规划飞行航线,保证影像的航向重叠、旁向重叠、分辨率等符合作业要求。在航线的设计中,一般设置30%的旁向重叠度,66%的航向重叠度。对于模型的自动生成,旁向重叠和航向重叠会要求更高[1]。再次要在已知的高精度点位上架设基站,在无人机起飞规定时间前开机,降落后在规定时间内关机。在测量时,需要量取天线高,记录基站开关机的具体时间,并进行像控点的测量。最后组装无人机和设置相机参数,实施无人机航拍,飞行结束后,分别下载无人机数据和基站数据。
在影像数据的获取过程中,会受到相机镜头畸变在内的仪器本身以及天气变化在内的外界自然影响而产生的不可避免的误差。如果不对原始影像进行预处理,会直接影响到后期成果数据的精度和质量。影像数据后续处理基于数字摄影测量、多视影像联合平差、计算机视觉等相关算法,数据处理过程中无须人工干预,具有高伸缩性和高效性。利用AgisoftPhotoscan、Smart3D capture等相关软件,在有无控制点的情况下,都可以实现多视图多视角的三维重建,还原最真实的三维场景。同时利用相关数据处理软件实现对三维模型的高度、面积、长度、体积等实现精准量测。倾斜摄影测量技术获取多视角的高分辨率影像数据,并实现大场景精细三维场景的最真实还原。数据获取处理的主要流程,如图1所示。

图1 数据获取处理技术流程
3 数据处理的关键技术
3.1 多视影像密集匹配和空三解算
由于倾斜摄影测量获取的影像是范围广而且多视角的,各个航带间的影像视场差别较大,倾斜立体影像间往往存在较大的几何畸变,增加了影像匹配的难度[2]。多视影像的密集匹配就是寻找连接点构网的过程,同时消除多视影像数据中的冗余信息。影像匹配的算法分三类:灰度匹配、特征匹配和关系匹配,匹配的共性就是在影像上按照匹配策略需找同名点[3]。基于SIFT算法为代表的特征匹配,匹配的误差较多、耗时较长。在倾斜摄影测量中导入处理影像数据,同时添加POS数据可以辅助多视影像的匹配,依据POS数据可以粗略得到原始影像的外方位元素,进行相关算法的粗匹配剔除一些误匹配点,进而再重新精确匹配[4]。空三解算的就是影像间精确几个拓扑关系重建的过程。根据地面布设的像控点,并以共线方程为基础,进行光束法区域网平差。
3.2 多节点并行计算的实现
并行计算是将计算任务分解成多个并行的子任务,分配到具有并行处理的计算节点上,通过各节点上的处理器相互协同,共同解算并行子任务,从而使得计算加速。并行计算系统主要有并行机,并行算法和并行编程三个重要组成部分,如图2所示。并行计算的基础是并行机,并行机的核心组成是处理器、内存和互联网络。通过互联网络将并行机串联起来,在并行机上实现影像数据的同步、共享和访问。针对特定应用类型进行互联网络拓扑设计,可以极大提升并行计算能力和效率。并行算法的主要设计分为任务分解、通信设计、任务聚合和处理器映射四个步骤,根据并行算法通过并行编程环境编制为程序并运行得到计算结果[5]。
影像数据的密集匹配和空三解算可以在任何一台并行机上实现,在模型重建过程中,将模型划分为若干个大小长度相等的规则瓦块。依据并行算法和程序,通过互联网络使得串联的并行机同时对划分好的规则瓦块进行并行计算。通过并行计算的实施,极大地提高三维模型计算和生成的速度,同时降低了三维模型对计算机硬件的配置要求。
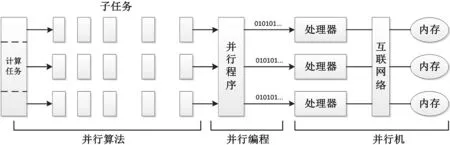
图2并行计算结构图
3.3 面向GPU的LOD可视化
在倾斜摄影测量的三维模型的可视化需要CPU和GPU协调合作完成,纹理映射、模型绘制以及场景的渲染主要依靠GPU的性能和效率。GPU具有小缓存多核的架构和快速高效的并行计算能力,适应GPU的数据结构必须能够充分发挥GPU高速处理和高效渲染的能力,避免计算机硬件数据带宽冲突问题[6]。倾斜摄影测量生成的模型数据进行分块分级处理,对于生成的瓦块数据建立四叉树或者八叉树的空间索引模型,从而提高数据的读取效率,减少数据I/O操作,加快数据的调度和绘制。基于四叉树索引结构的多细节层次模型(LOD),如图3所示。在三维模型数据生成过程中,通过不同的简化比例得到三维模型数据的LOD,一般至少有5层~6层,多的可达10层左右[7]。
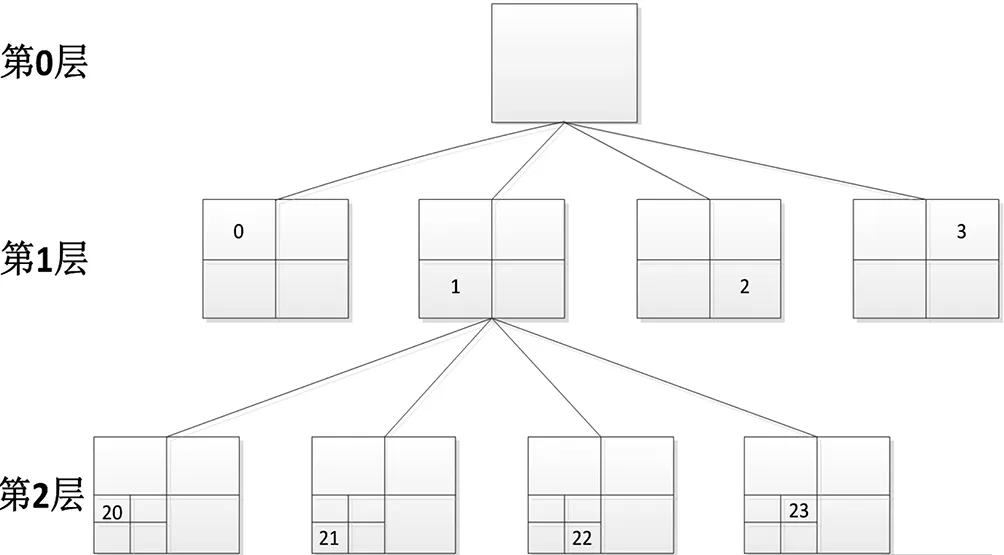
图3 基于四叉树的LOD模型
4 数据质量分析与比较
4.1 LiDAR建模的特点分析
三维激光扫描技术具有非接触、高精度、全天候等诸多优点,广泛应用在文物保护、安全监测、城市规划等相关领域。通过对海量的点云数据进行配准、精简、分割、封装、补洞等一系列烦琐的操作构建三角网模型,同时海量点云数据的处理完全依赖计算机硬件配置的高低[8]。彩色模型生成主要是通过将三角网模型进行UV展开,再将纹理数据一一对应手工映射。这种方法不仅耗时长、效率低、精度不高,同时纹理映射的质量一般,如下图4所示。倾斜摄影测量作业范围更大,影像数据量要比同范围的点云数据量更小,将影像数据和控制点数据导入后,自动实现多视影像联合平差、密集匹配和空三解算。数据处理中对计算机硬件要求较低,可以实现并行计算,可以获取密集点云、三角网模型、彩色模型以及正射影像等诸多成果数据,支持网络发布等诸多优点。利用三维激光点云建模和倾斜摄影测量建模的比较,如表1所示。
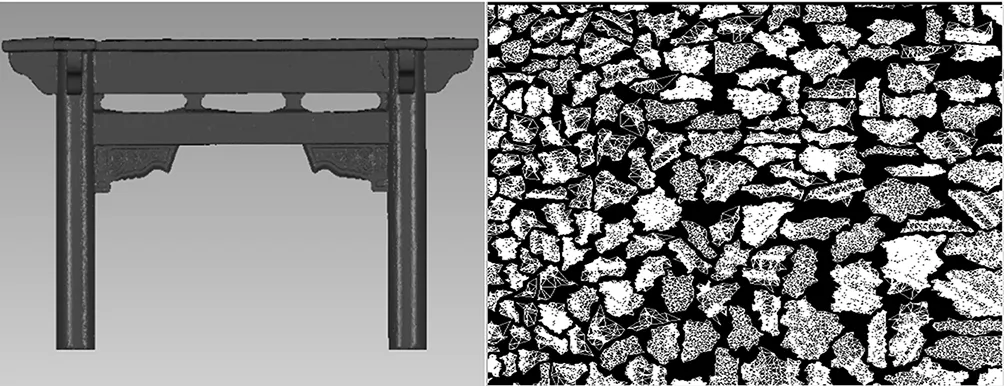
图4 三角网模型UV展开
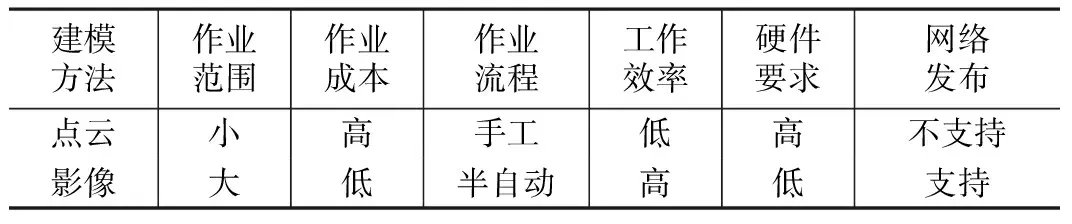
不同建模方法的比较 表1
三维激光扫描建模技术由于精度高、成本高等特点,更适应于构建小范围的精细模型,不适应于大场景三维模型的构建。倾斜摄影测量在大场景三维模型构建中成本低、范围广、效率高等优点更加突出,同时精度也能满足三维模型和大比例尺DOM制作的精度要求。为了验证成果数据精度,在航测区域布设了8个控制点,其中4个建模控制点,剩余4个为模型验证点,如表2所示。X,Y,Z为实测的坐标值,X′,Y′,Z′为对应三维模型的坐标值,△X,△Y,△Z为残差值,经过计算中误差均符合相关模型和制图的规范要求。在实际的工程项目中,可以根据需求将两种建模方法相结合。大场景三维模型的快速构建采用倾斜测量技术摄影,小范围精细模型构建采用三维激光扫描技术,实现多源数据下多层次不同粒度三维模型的融合统一。也可以利用三维激光扫描获取的高精度点云数据和倾斜摄影测量技术生成的三维模型数据进行分析、对比和校正,从而提高三维模型数据的整体精度。
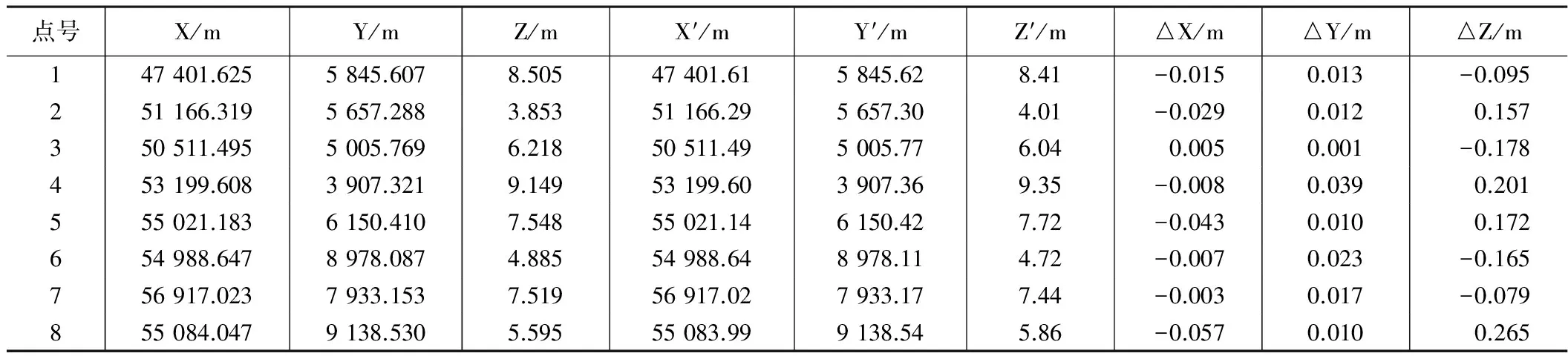
控制点与模型验证点对比 表2
4.2 数据质量要求以及评价标准
外业数据的质量要求主要是像控点的精度和影像的质量。像控点的精度直接影响到三维模型数据的几何精度。像控点的布设间距根据三维模型精度要求与像片比例尺的不同而不同,一般平均 0.5 km~20 km,采用E级GPS网的作业要求进行像控点联测就可以达到三维模型对像控点的精度要求。根据GPS网的布网要求以及起算点和像控点的分布来布设GPS网,网中应联测三个以上的公共点。考虑到高程拟合,在网的四周和中心需要联测一定数量的水准点。影像的质量好坏直接影响到三维模型等成果数据的质量。无人机获取的影像数据首先基于人为经验的视觉特征要满足清晰、无色差、色调一致,同时影像数据的几何指标、构象指标、其他指标等也要符合规定要求,综合人为和客观两种评价构建影像质量综合评定模型[9]。
内业数据处理出来的三维模型数据要求各要素应该完整,没有遗漏,同时没有冗余,模型包括其组成部分的几何位置精度要符合规范要求。三维模型各个部分各个要素的分类编码要正确,属性项或者属性值应该完整正确。三维模型数据的存储格式和空间位置的拓扑关系具有一致性,同时三维模型数据应具有较强的现势性等[10~12]。通过多个项目实践,基于倾斜摄影测量生成的大场景多角度三维模型的完整性、位置精度、属性精度、表现精度、逻辑一致性等均符合数据质量的控制要求。
5 结 语
倾斜摄影测量快速生成的三维实景模型在智慧城市、灾害应急、国土安全、文物保护等诸多领域中发挥越来越重要的作用,同样也面临着较多的挑战。由于硬件或者拍摄技术等因素,对地面上高度较低且不规则物体的真实还原还不够好。面对倾斜摄影测量技术快速生成的大场景三维模型,仍需要进一步对模型开发和利用,模型单体化和数据的融合是倾斜摄影测量面临的亟待解决的问题。目前实现所谓的“单体化”,只是在利用外包围合将模型特定部分进行高亮显示而已,并没有真正意义上实现三维模型各要素的自动分层、分割和提取。实现将矢量的二维数据和三维模型数据相融合以及真正意义上的模型单体化,三维模型数据的分析、查询、编辑也将成为现实。
[1] 刘洋. 无人机倾斜摄影测量影像处理与三维建模的研究[D]. 抚州:东华理工大学,2016.
[2] 刘玉梅,王仁礼,任保刚. 基于仿射不变算子的倾斜影像匹配算法评价[J]. 地理信息世界,2017,24(1):45~47.
[3] 张振超. 多视角倾斜航空影像匹配技术研究[D]. 郑州:解放军信息工程大学,2015.
[4] 赵明衍,戴晨光,狄亚楠等. 一种POS数据辅助多视角倾斜航空影像匹配方法[J]. 测绘科学技术学报,2016,33(4):431~435.
[5] 刘军. Hadoop大数据处理[M]. 北京:人民邮电出版社,2013.
[6] 陈静,吴思,谢秉雄. 面向GPU绘制的复杂三维模型可视化方法[J]. 武汉大学学报·信息科学版,2014,39(1):106~111.
[7] 艾从. 基于WebGL的倾斜摄影测量三维模型可视化方案设计与实现[D]. 北京:北京建筑大学,2015.
[8] 侯妙乐,胡云岗,张向前. 石质文物三维信息留取技术研究与应用[M]. 北京:中国大地出版社,2015.
[9] 赵有松,伊粟,张莉等. 航空遥感影像质量评价方法探讨[J]. 测绘科学,2016,44(1):158~161.
[10] CH /T 9015-2012. 三维地理信息模型数据产品规范[S].
[11] 谭金石,黄正忠. 基于倾斜摄影测量技术的实景三维建模及精度评估[J]. 现代测绘,2015,38(5):21~24.
[12] 王丙涛,王继. 基于倾斜摄影技术的三维建模生产与质量分析[J]. 城市勘测,2015,10(5):80~85.
猜你喜欢
一重技术(2021年5期)2022-01-18
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年11期)2018-08-04
旅游纵览(2014年8期)2014-09-10
焦点(2014年3期)2014-03-11
现代防御技术(2014年6期)2014-02-28