三维激光扫描技术在海洋馆主缸测量中的应用
2018-03-15 03:29:32金婷罗峰
城市勘测 2018年1期
金婷,罗峰
(广州市城市规划勘测设计研究院,广东 广州 510060)
1 引 言
地面三维激光扫描测量技术是近年来发展迅速的一种新技术,已成为空间数据获取的一种重要技术手段[1]。同传统的测量手段相比,三维激光扫描测量技术不需要合作目标,可以自动、连续、快速的采集数据,拥有许多独特优势[2,3]:①数据获取速度快,实时性强;②数据量大,精度较高;③主动性强,能全天候工作;④全数字特征,信息传输、加工、表达容易。
本文结合三维激光扫描的基本工作原理,采用Focus 3D X330地面三维激光扫描系统对广州市正佳海洋世界生物馆有限公司海洋馆的主缸亚克力板横向长度、纵向弧长等内容进行综合测量。同时采用全站仪测量进行验证,可见三维激光扫描测量结果精确可靠,为海洋馆主缸亚克力板申报世界吉尼斯纪录提供了直观准确的数据。
2 海洋馆主缸介绍
广州市正佳极地海洋世界坐落于天河区正佳广场西侧二、三层,总建筑面积超 58 000 m2,拥有共500种超30 000只极地海洋动物,是目前为止全球首座室内空中极地海洋馆。展区中有一块长约 40 m亚克力的单体水族展示缸,业主为了精确获取亚克力主缸的各项尺寸,进而申报世界吉尼斯纪录,需要获取亚克力板的精确尺寸结果。
3 研究方法
亚克力板的弧长由外露部分和入地端两部分组成,其中入地部分采用激光测距仪测量和钢尺丈量两种方法进行测量,外露部分采用三维激光扫描仪进行测量[5]。
地面三维激光测量系统亚克力综合测量工作过程分为外业数据采集和内业数据处理。在具体工作展开之前,首先根据扫描对象的不同和精度的具体要求设计一条合适的扫描路线、确定恰当的采样密度、大致确定扫描仪至扫描物体的距离、设站数、大致的设站位置等。外业数据采集包括数据采集、现场分析采集到的数据是否大致符合要求、进行初步的质量分析和控制等。内业数据处理包括外业采集到的激光扫描原始数据的显示,数据的规则格网化,数据滤波、分类、分割,数据的压缩,图像处理,模式识别等。
为了精确、可靠地获取巨型亚克力板的关键尺寸,同时为在复杂的观测环境的情况下,减少了接触性测量,降低了作业危险。项目主要采用地面三维激光扫描仪对亚克力板综合扫描测量,辅以全站仪测量进行验证。
项目的技术流程如图1所示。

图1 测量流程图
4 三维激光扫描测量方法
首先进行数据采集。由于扫描现场视角及目标构筑物(折射及散射激光点云等)特性,为达到数据精度及扫描密度要求[10],在清理干净的表面平铺一层反射纸,选取板内侧地面四个扫描站点、通道顶一个扫描站点,板外侧一个扫描站点进行数据采集。由于要建立亚克力板的精密三维模型,每站采用了较高的采样密度,采样间隔设置为10米处 4 mm。采样间隔大小与扫描速度和数据量有直接关系。由于分站扫描,每站数据主要由扫描目标的点云数据、拼接用的目标特征点云数据、扫描范围的数码相片等数据组成。根据站内公共目标标志特征点云数据,把多站数据进行工程坐标转换,然后进行数据拼接,如图2~图4所示。

图2 单站点云数据

图3 多站点云数据

图4 多站点云数据(去噪后)
第二步进行空间建模。由于地面三维激光扫描测量技术采集得到的数据是由全离散的矢量距离点构成的“点云(Points Cloud)”,它的每一个像素所包含的是一个距离值和一个角度值,这种图像称为距离图像。距离图像本身蕴涵丰富的特征信息,可以直接构建高精度的DEM,但又没有任何明显的形体信息和拓扑关系信息,不能直观表达,必须用点、多边形、曲线、曲面等形式将立体模型描述出来,构成模型。这里原始采集的点云数据通过三角格网进行组织和表达,事实上,由于采样间隔非常小,所以数据量非常大,因此在实际应用过程中,可采用滤波和压缩方法获得简化的数据,根据这些数据进行分析将大大提高处理速度。
第三步进行空间量测。根据采集获得的点云数据,建立构筑物的三维模型,该模型具有完整的三维空间信息,因此,可以基于此进行严密的空间量测,建立全息三维资料档案,利于日后的全景恢复和模拟。本次亚克力板横向长度测量利用扫描的亚克力板点云数据横向切割,形成特征点线,直接量测得出结果为 40.809 m。纵向三角剖分获得纵向弧长为 7.658 m,利用激光测距仪和钢尺多次测量取平均数的方法获得亚克力板入地端长度为 0.543 m,最终纵向总弧长为 8.201 m,整体亚克力板表面积为横向长度乘积纵向总弧长为 334.674 m2,如图5~图6所示。

图5 亚克力板横向长度测量结果图
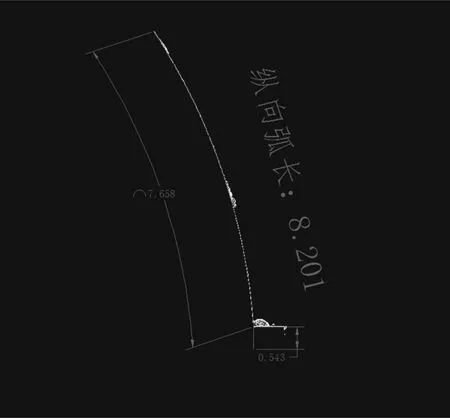
图6 亚克力板纵向弧长测量结果图
5 全站仪综合测量验证
利用全站仪作为辅助手段对地面三维激光扫描仪的测量结果进行验证。采用的全站仪为日本生产的TOPCON(拓普康)OS 102。仪器精度:测角精度:2″;测距精度:(2+2ppm×D)mm。
首先建立坐标系统,获取亚克力板的特征点坐标:选取亚克力板与地面台阶相交的最左点为坐标系统原点;以平行于亚克力板的横向方向指向右侧的轴为X轴;以垂直于亚克力板的横向方向并竖直向上的轴为Z轴;以垂直于X轴和z轴所在平面并与x轴顺时针方向成90°夹角的方向为y轴。
第二步进行外业数据采集。测量主缸亚克力板横向长度步骤:固定全站仪垂直度盘,以亚克力板的一端尽头为起点,另一端尽头为终点,由跑尺员使用棱镜放置在特征点处开始采集数据,调整全站仪的水平度盘,沿一条直线均匀间隔采集数据并进行记录保存;测量主缸亚克力板纵向弧长步骤:沿在亚克力板事先铺设好的反射纸由顶端向底端纵向采集附带高程的数据并进行记录保存。
为保证测量数据的精度,在测量过程中,对全站仪测距长度进行了改正[8](根据广州计量检测技术研究院对本次测量所使用仪器的检定结果,测距加常数为K=0.9 mm,乘常数为R=-1.3 mm/km),改正量计算公式为:
△=K+R×S
式中:△为改正量,单位:m
K为测距加常数
R为测距乘常数
S为全站仪测距长度,单位:m
第三步进行内业数据处理。采用导线计算软件对数据进行分析计算,获取亚克力板的关键点坐标,然后把坐标导入到AutoCAD制图软件,采用最小二乘法对亚克力板的横向长度和纵向弧长进行了拟合。测得亚克力板的长度为 40.802 m(如图7所示)。

图7 AUTOCAD制图软件计算亚克力板长度
外业对亚克力板的4个弧段进行了测量(如图8所示),分别计算的结果为:7.650 m、 7.682 m、 7.698 m和 7.650 m,取平均值为 7.67 m。加上亚克力板入地端长度为 0.543 m,亚克力板的弧段总长为 8.213 m。
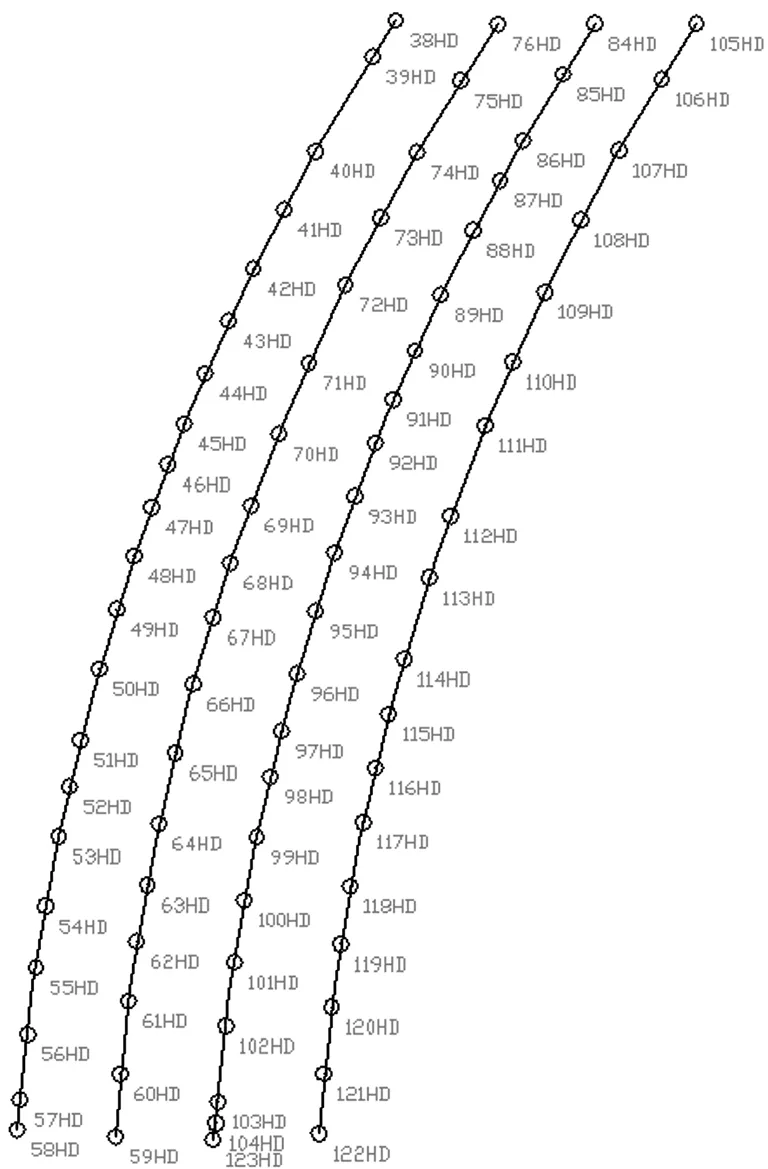
图8 AUTOCAD制图软件计算亚克力板弧段
6 数据对比分析
本文采取地面三维激光扫描仪测量结果,全站仪测量结果进行佐证,表1为两种测量手段测量结果及比较情况。
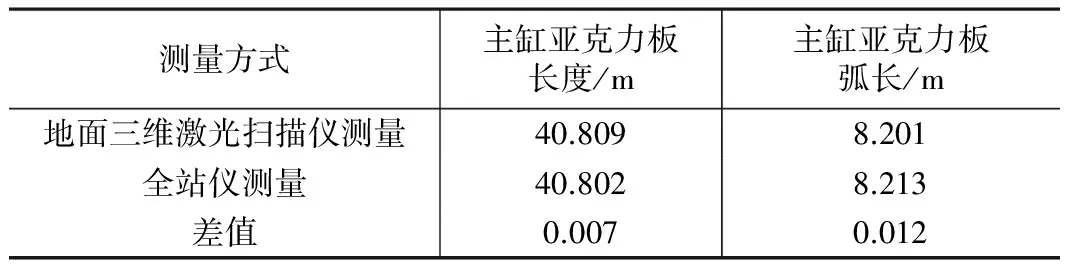
亚克力板测量结果评定表 表1
亚克力板弧长与横向长度相乘,得出以上两种方法测量出的亚克力板面积分别为 334.674 m2和 335.107 m2,相差 0.433 m2。
7 结 语
两种方法测量结果相差在厘米级别,结果比较吻合。由于全站仪测量测量点离散,通过坐标拟合存在模型误差,而地面三维激光扫描仪具有点云数据丰富、能真实反映被测物体、测量精度高等特点。综上可得出结论:利用三维激光扫描技术测量海洋馆主缸亚克力板,结果可靠、准确。
[1] 孔祥玲,欧斌. 基于三维激光扫描技术的建筑物轮廓拟合精度研究[J]. 城市勘测,2013(3).
[2] 黄姗,薛勇,蒋涛. 三维激光扫描技术在地质滑坡中的应用[J]. 测绘通报,2012(1).
[3] 宋碧波,卢小平,卢遥. 基于点云数据的建筑物三维重建[J]. 测绘通报,2010(S0):228-229.
[4] 朱宁宁. 三维激光扫描在地铁隧道形变监测中的应用[J]. 测绘工程,2015(5).
[5] 邢昱,范张伟,吴莹. 基于GIS与三维激光扫描的古建筑保护研究[J]. 地理空间信息,2009,7(1):88~90.
[6] 余明,丁辰,过静珺. 激光三维扫描技术用于古建筑测绘的研究[J]. 测绘科学,2004,29(5):69~70.
[7] 王炎松,谢飞. 古建保护对于三维激光扫描点云数据处理软件系统的用户需求[J]. 华中建筑,2008,26(4):130~132.
[8] 李滨. 徕卡三维激光扫描系统在文物保护领域的应用[J]. 测绘通报,2008(6):72~73.
[9] 吴海毓. 三维激光扫描技术在古建数字化保护中的应用[D]. 北京:北京建筑工程学院,2008.
[10] 李勇,吴华意. 基于形态学梯度的机载激光扫描数据滤波方法[J]. 遥感学报,2008,12(4):633~639.
[11] 李亮,吴侃,刘虎等. 地面三维激光扫描地形测量数据粗差剔除算法及实现[J]. 测绘科学,2010,35(3):187~189.
猜你喜欢
科普童话·学霸日记(2023年1期)2023-06-29 09:10:53
中学生数理化·中考版(2023年8期)2023-06-27 06:38:48
小主人报(2022年7期)2022-08-16 06:59:34
新世纪智能(数学备考)(2021年10期)2021-12-21 06:20:42
知识窗(2021年1期)2021-02-23 20:52:13
新世纪智能(数学备考)(2020年10期)2021-01-04 00:37:50
河北画报(2020年10期)2020-11-26 07:21:14
儿童时代·幸福宝宝(2019年8期)2019-10-20 09:24:44
少儿科学周刊·少年版(2019年1期)2019-04-18 00:53:38
童话王国·文学大师班(2017年10期)2017-11-08 08:44:55