三维激光扫描技术在地下人防工程中的应用实践
2018-03-15 03:29:31马雪萍陈立民
城市勘测 2018年1期
马雪萍,陈立民
(镇江市勘察测绘研究院,江苏 镇江 212004)
1 引 言
三维激光扫描技术通过高速激光扫描测量的方法,以点云的形式获取物体或地形表面的三维空间尺寸信息和反射率信息[1],并可以逼真地保留被扫描对象的纹理。与传统的数据采集方法相比,三维激光扫描技术具有高效率、高精度、非接触主动测量等独特优势,有效避免了传统作业方式外业劳动强度大、时间长、重复测量、工作效率低等弊端[2],为快速建立物体的三维影像模型提供了一种全新的技术手段。
某地下人防工程建成于“文革”后期,鉴于当时的历史条件,对于深层地下人防工程通道的位置未能予以正确标定。为满足工程后续规划再利用要求,发挥人防工程作用,需要对其内部进行测量,获取该人防工程的精确三维信息。但是,该人防工程通道上下立体两层,结构错综复杂,内部四通八达,没有通信讯号,没有人工和天然光源,而且年代久远缺乏维护,用常规的测绘仪器无法进行现场测绘或者效率低下,测绘精度也无法保障。
经过前期的充分调研和技术分析探讨,项目组拟用美国法如三维激光扫描仪FARO Focus3DX330对该地下人防工程进行三维激光扫描测绘。并以此为基础,开展三维激光扫描技术在地下人防工程中的应用研究,力争探索并形成一套切实可行的外业三维扫描测绘、内业三维点云数据处理、横截面和平面图绘制、漫游视频制作等多个三维点云数据应用的技术流程。
2 三维激光扫描技术在地下人防工程中的测绘流程
第一步:现场踏勘及测量项目规划,制定实施方案。
第二步:外业三维数据扫描实施,包括控制点布设、标靶纸控制点测量、扫描站布设、点云数据采集等。
第三步:点云数据内业处理,利用法如扫描仪自带的处理软件FARO SCENE,对扫描的点云数据进行数据检查、预处理、数据拼接、整体运算等操作。
第四步:三维点云数据利用,包括可量测实景生成、横截面和平面图绘制、三维模型建立与交互处理等。
第五步:质量评定。
3 外业三维数据扫描采集
在人防工程通道内以及通道出口附近施测基础控制点,在通道内墙上的指定位置贴上扫描用标靶纸,作为点云数据纠正的控制点。由于人防工程内隧道四通八达,所以提前设计好扫描工作路线,防止发生遗漏,或者重复扫描的情况。利用FARO Focus3DX 330三维激光扫描仪,按照设计路线对隧道内逐站扫描。外业扫描完成后,通过SCENE软件把点云数据拼接处理好,坐标系转换校正到地方坐标系当中。
3.1 控制测量
首先在主通道洞口两端各布设2个E级GPS点,使用Topcon Hiper SR型GPS-RTK接收机实施观测,利用JSCORS中心提供的静态后处理数据计算出4个GPS控制点的坐标数据。然后在主通道内布设一条附和导线,共施测二级导线点8个,利用Topcon全站仪观测。所有控制点的高程成果均按照四等水准的测量要求施测。
3.2 标靶纸布测
为给后期点云数据坐标转换提供控制点,需在人防工程通道内墙上控制点处张贴标靶纸,每个地面控制点附近周围墙上均匀布设3~4张标靶纸。标靶纸的布设要保证以下几个原则,不能和测站点分布在同一直线上,同时它必须和测站通视、距离测站不宜太远,且保证相邻站点间有3个及以上的公共标靶点[3]。
由于通道内墙壁年久失修,墙上石灰脱落,所以张贴标靶纸的时候,先找到相对平滑的墙面,用铲子铲掉一层石灰层,标靶纸后面和墙上都均匀涂好胶水,使得标靶纸牢固不会脱落。另外,由于扫描工作量很大,达到几百站,标靶纸张贴好了之后,按照顺序编号,同时在图纸上标绘出编号的相对位置,这样规范作业,避免了后期点位混淆的问题。实测过程中,利用通道内已经布设完成8个二级导线点,使用全站仪分站测量墙上控制点坐标并记录编号,为了保证标靶纸控制点的精度,全站仪实测过程中的支导线测量站数严格控制在3站以内(包含3站)。该阶段测量分为6个区块完成,相邻区块间进行30%的重复测量作为检校,最终共布测标靶纸控制点65个。
3.3 扫描站布设
两个扫描站之间利用3个以上标靶球进行拼接,因此标靶球的位置非常重要,而且在下一站扫描完成之前,不能改变标靶球的位置,否则扫描衔接会出错,导致前面若干站扫描工作作废。首先,规划好扫描线路,按照既定路线进行扫描,合理安排好工作时间和工作间歇的位置。在工作间歇的时候,做好标靶球的位置标记。这里采用的办法是在放置标靶球的位置地上贴上圆形标记纸,这样长时间暂停工作,即便标靶球位置被人为不小心触碰移位,也可以找到原来的位置。
地下人防工程通道内基本没有什么障碍物,根据扫描仪的参数,扫描站的布设根据实际情况 10 m~20 m左右架设一个站点,依次向前推进。遇到路口或者转折区域等特殊情况适当调整布设的间距,完成扫描工作。本项目总计布设扫描站668站。
3.4 点云数据采集
点云数据采集时将仪器放置在观测环境中 30 min以上,扫描作业时,按照标准设置点间距或采集分辨率,按照设计方案的要求布设扫描站点,使相邻扫描站间有效点云的重叠度不低于30%,困难区域不低于15%。根据项目名称、扫描日期、扫描站号等信息命名扫描站点,存储扫描数据,并在大比例地形图、平面图或者草图上标注扫描站位置;扫描过程中出现断电、死机、仪器位置变动等异常情况时,初始化扫描仪,重新扫描。扫描结束后,将扫描数据导入电脑,检查点云数据覆盖范围完整性、标靶数据完整性和可用性。对缺失和异常数据,及时安排补扫。经过8天的扫描工作(含补充扫描),共计获取点云数据 151 GB。图1为外业数据采集场景,图中墙面上的白底黑色方块标记处为标靶纸控制点,地面球体为标靶球。

图1 外业数据采集场景
4 点云数据内业处理
主要包括点云数据配准、坐标系转换、降噪与抽稀等。
4.1 点云数据配准
点云数据配准可以基于控制点、标靶、特征地物点进行。本项目选用后两种方法,首先使用标靶球进行配准,采用三点定位的原理将点云数据整合。每两站之间,至少有3个公共标靶球,实际操作时点选标靶球的中心位置,软件系统自动识别,配准拼接过程快捷。在首步标靶拼接配准完成后,针对通视条件良好的扫描数据利用相邻两站扫描站上获取的重合点云数据中的特征地物点检校和提高配准精度。
本项目共有668站点云数据,利用点云处理软件SCENE进行配准。配准时,为了加快处理速度,减小整体误差,共分为5个群集,群集之间有公共区域,通过标记标靶球拼接。
4.2 坐标系转换
由于每个测站获取的点云数据是相对独立的[4],且是自由坐标系,需要利用控制点进行纠正和坐标转换,得到地方坐标系的数据。在本次施测的65个控制点中,点云拼接转换使用了45个控制点,另外20个作为检查点。为了操作方便,控制点导入前,进行了偏移操作,偏移到靠近原点的位置。检查点的中误差为△X:0.021,△Y:0.025,△Z:0.008,精度满足测量要求。
4.3 降噪与抽稀
降噪是指将测量时人员走动绿化树木等形成的无效点云数据删除[5]。当点云数据中存在脱离目标物的异常点、孤立点时,采用滤波或者人机交互进行降噪处理;点云数据抽稀时不应影响目标特征识别与提取,且抽稀后点间距应满足精度要求。
5 三维点云数据应用
5.1 绘制横截面图和二维平面图
横截面和平面图绘制流程包括数据投影、矢量数据采集、图形编辑和图形整饰。点云数据具有三维坐标,利用该数据可以得到人防通道的平面图数据和横截面数据,采集人防通道顶底高程等。具体做法是:使用法如SCENE软件输出.RCP格式的数据,将数据加载到AutoCAD 2014软件上(如图2所示),并调整点云视图,直接在点云上绘制特征线,生成平面图(如图3所示)。在AutoCAD 2014中进行点云切片,用实线进行连接,绘制出截面图(如图4所示)。
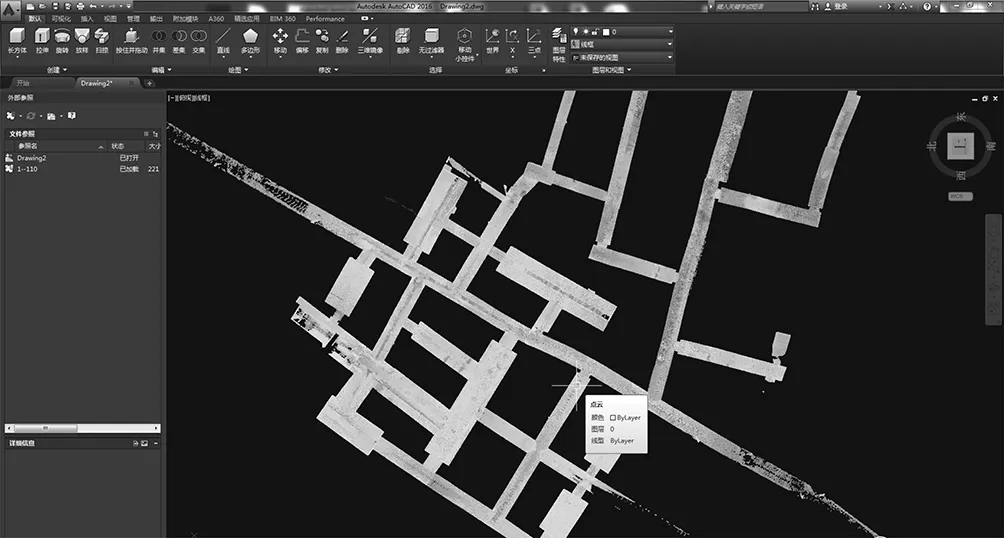
图2 AutoCAD中加载点云数据图
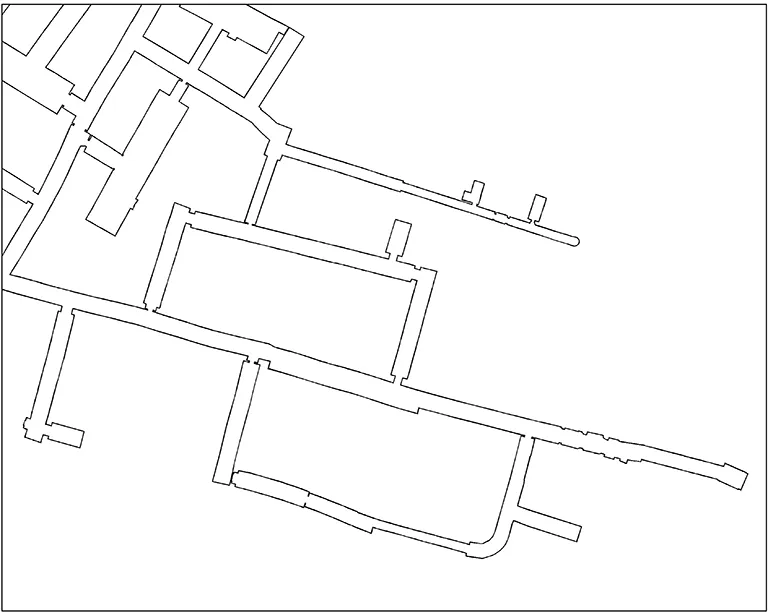
图3 人防工程局部平面图

图4 截面图
5.2 制作点云漫游视频
(1)导入点云数据
将Recap转换完的点云数据导入视频制作软件,由于点云整体数据量太大,将点云分成6块,依次进行视频的制作。
(2)添加视点
在视频制作软件中,按照隧道的走向,调整点云视角,逐个添加视点。
(3)生成动画
视点添加完成后,点击生成动画的命令,即可将以上添加的视点串联到一起,生成需要的点云漫游视频,如图5所示。
图5 视频漫游
6 质量检查与评价
在项目组自查互查的基础上,生产部门安排了专职检查员进行100%的过程检查,对作业过程中发现的问题进行了及时整改和复查,详细编写了过程检查记录;院质量管控部安排技术力量实施了最终检查,重点检查了人防工程通道特征点的平面位置中误差、间距中误差、高程点精度以及扫描数据、三维点云数据的完整性,并对项目成果、成图质量进行评价,经综合评定,该项目成果质量为良级品。各类数学精度指标按 1∶500要求检测情况如表1所示。
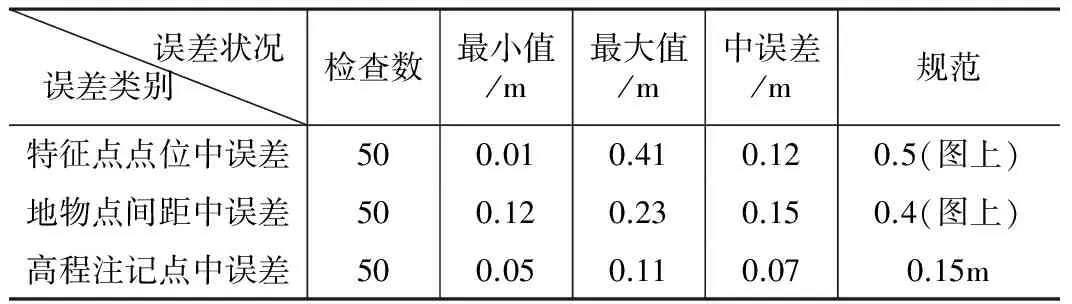
各类数学精度指标检测情况汇总表 表1
7 经验总结
该项目通道大部分呈长条带状式,而且比较窄,布设的控制点大部分分布于主干道上,数据拼接转换坐标后,通道分支端处的数据位置误差明显大于主干道;而且在扫描前期由于没有完全熟悉通道内部情况,在某个通道扫描一半遇到封闭墙只能原路返回,造成了重复扫描,浪费了时间。
通过这个项目的顺利实施形成的技术流程,为今后类似工程提供了经验:
(1)激光扫描工作开展之前先熟悉整体环境,最好能熟悉当天工作范围,规划好扫描路径,避免重复扫描同时也可以提高工作效率。
(2)遇到岔路口较多地方,作为点云纠正控制点的标记点、标靶纸需要多贴几张,当利用标靶球拼接不够用或者因特殊情况误差比较大时可以用标靶纸辅助拼接、进行数据检核。
(3)全站仪导线控制点应尽量多且均匀分布在整个测区,点间距根据整体情况来布置,点数量尽量多、带状数据最好每个扫描站里都有控制点,非带状环境则均匀分布整个扫描区域中。
(4)点云整体拼接位置偏差超出预期时可分为多个群集单个拼接,再利用控制点将单个群集坐标转换,最后可以整合所有数据减小累计误差,提高整体精度。
8 结 语
三维激光扫描技术是目前获取三维空间数据的最先进的技术之一,该技术作为传统测量方法的有益补充,可以无接触、高密度、高精度、快速地获取地物信息。在该地下人防工程测绘过程中,项目组充分利用三维激光扫描技术优势,简单、快速、安全、精确地获取了非常详细、高质量数据图像,大大地提高了工作效率,丰富了测绘成果内容与形式,为今后推动三维激光扫描技术在文物数字化保护、工程测量、数字城市三维可视化、城乡规划等领域的应用积累了宝贵的经验。
[1] 邓洁茹,王峰. 基于三维激光扫描技术的树木枝干建模研究[J]. 城市勘测,2017,157(2):109~113.
[2] 史秀保,汪帆,葛纪坤. 三维激光扫描在建筑规划竣工测绘中的应用研究[J]. 城市勘测,2014,139(2):83~86.
[3] 徐少辉. 地面三维激光扫描技术在地铁隧道竣工测量中的应用[J]. 城市勘测,2016,154(5):68~72.
[4] 南竣祥,梁爽,李海泉等. Z+F三维激光扫描仪在石峁遗址测量中的应用[J]. 测绘与空间地理信息,2017,40(2):82~84.
[5] 张君阳,沈鑫甦,葛晓平. 三维激光扫描技术在文物保护中的应用[J]. 浙江测绘与地理信息,2016,129(4):26~28.
猜你喜欢
建材发展导向(2022年12期)2022-08-19 02:32:14
卫星应用(2022年3期)2022-05-23 13:44:46
建材发展导向(2022年6期)2022-04-18 08:17:26
鸭绿江·下半月(2020年2期)2020-04-07 03:37:05
鸭绿江·下半月(2020年1期)2020-03-23 05:57:35
鸭绿江·下半月(2019年12期)2019-10-21 06:49:52
测绘工程(2018年3期)2018-03-20 03:05:12
华东师范大学学报(自然科学版)(2017年1期)2017-02-27 13:41:06
测绘学报(2015年4期)2015-01-14 03:01:28
大地测量与地球动力学(2014年3期)2014-02-13 05:44:02