移动测量技术在规划监察执法中的应用研究
2018-03-15 03:29:31吕楠苟永刚龙川向华
城市勘测 2018年1期
吕楠,苟永刚,龙川,向华
(1.重庆市勘测院,重庆 401121; 2.重庆市移动测量工程技术研究中心,重庆 401121;3.重庆数字城市科技有限公司,重庆 401121)
1 引 言
移动测量技术是近几年来发展迅速的一项测绘新技术[1]。该技术集成GNSS(全球定位系统)、INS(惯性导航系统)、LiDAR(激光扫描仪)、Ladybug(全景相机)、DMI(里程计)等传感器,架设在车载移动平台上,在平台移动过程中,可快速获取周边的高精度三维点云与实景影像数据。经过多年的研究,移动测量技术在数字城市、智慧城市建设、城市市政设施普查、高速路资产普查、环保厂区数据获取、交通设施管理、勘察测绘、公共安全应急、公众地图服务等领域得到了广泛的应用,并取得了良好的应用效果[2~8]。
城市规划监察执法主要是对城市规划区内建设工程项目的实施情况进行监督、检查,依法对违法建筑实施强行制止和拆除,参与规划违法行为的调查、取证,是城市环境优美的基本保障[9]。规划监察执法传统的作业方式往往是通过群众举报或执法人员现场踏勘等发现违法行为,具有很大的被动性,且效率低下,妨碍了违法行为的及时发现、取证和处理。移动测量技术在数据获取上的优势,为城市规划监察执法提供了便利,研究移动测量技术在规划监察执法中的应用方法具有很大的现实意义。
因此,本文针对移动测量技术获取数据速度快、精度高的特点,与城市规划监察执法相结合,探索了移动测量技术在城市规划监察执法中应用的可行性及优越性。
2 车载移动测量系统
本文研究所用的车载移动测量设备是重庆数字城市科技有限公司自主研发的DCQ-MMS-X1型车载移动测量系统,该系统集成的主要设备包括GNSS、INS、LiDAR、DMI、Ladybug等,是一种新型的点云及全景影像采集装置。该系统的技术原理如图1所示:
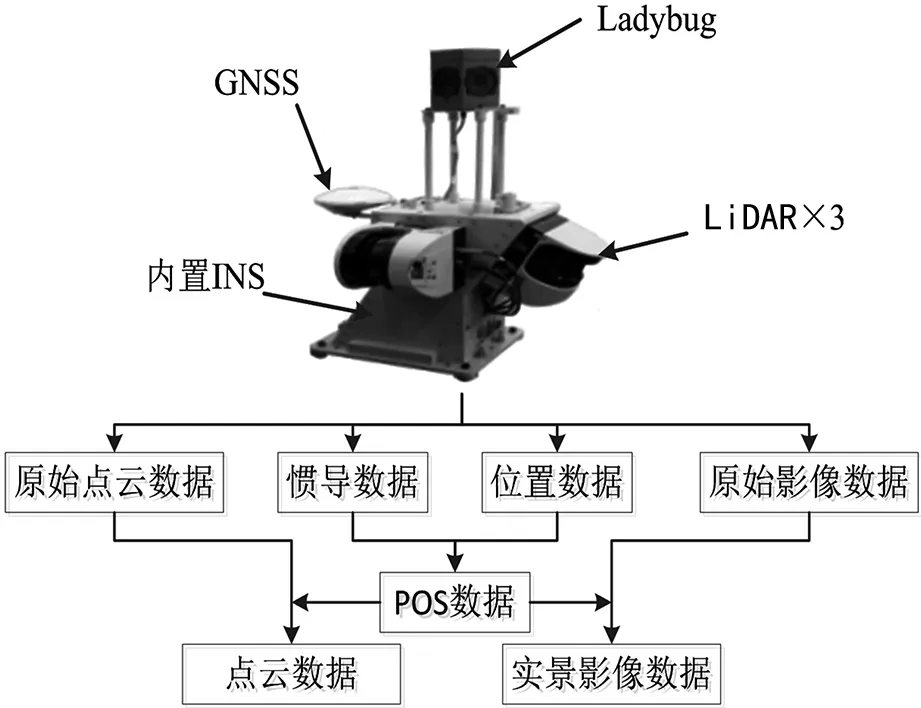
图1 移动测量技术原理
如图1所示,该系统集成了3台LiDAR设备,分别安装在左、右、后(以车辆前进方向为正前方)三个方向,用于采集点云数据;Ladybug安装在平台最顶端,用于采集全景影像数据;INS稳固在平台内部,用于记录平台的姿态信息;GNSS用于获取平台的实时位置。此外,还有安装在车辆右后轮胎上的DMI传感器,用于记录车辆行驶的距离等信息。集成的所有传感器都由车内控制单元统一控制,并实现信息数据的同步。
车载移动测量系统采集的原始数据主要有惯导数据、位置数据、原始点云数据、原始影像数据。其中,位置数据作为移动站数据、与基站数据、惯导数据结合进行POS(位置与姿态)数据的解算,然后通过POS数据,可以将原始点云数据转换为通用格式的点云数据,并将原始实景影像转换为带有位置信息的影像数据,点云数据和实景影像数据是本文研究移动测量技术在规划监察执法中应用数据基础。
当前违法建筑数据采集主要依靠执法人员现场踏勘,不仅工作费时费力,而且后期的数据整理、登记和管理存在着数据不全面、不够系统化的缺点,同时城市违法建筑采集数据的更新也无法及时保障[9~11]。利用移动测量系统可以实现城市违法建筑数据采集的连续性、完整性,并且有准确的位置信息,能够协助执法人员及时的发现违法行为,对执法工作的开展有很大帮助。
3 违法建筑数据采集
3.1 数据采集方案
结合已有数据和常规数据采集方案及违法建筑特点,从城市规划监察执法人员的需求出发,制定了移动测量系统违法建筑数据采集方案,如图2所示:
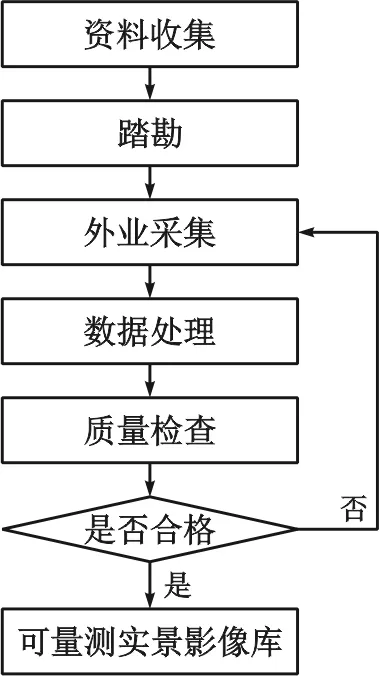
图2 违法建筑数据采集方案
(1)资料收集
首先,收集采集区域的路网、道路交叉口、隧道、桥梁及立体交通等分布情况,收集采集区域违法建筑的历史资料,了解采集当日的天气状况,避免在雨天或恶劣天气条件下进行违法建筑数据采集。结合采集区域地形图或者电子地图初步确定采集路线,并对无法确定的路线进行标记。
(2)踏勘
若有必要,可实地了解采集区域交通、违法建筑隐患点。若需实地架设基站,则需确定基站的架设位置。踏勘结束后,确定采集路线及作业计划。
(3)外业采集
根据确定的采集路线,使用移动测量系统进行外业数据采集,外业采集的主要原始数据有点云数据、全景影像数据、GPS数据和惯性导航数据,用于内业数据的处理。
(4)数据处理
首先,利用GPS数据和惯性导航数据进行POS数据的解算;然后根据POS数据将原始点云数据和全景数据进行格式转换。为了使规划执法人员在发现违法违规建筑后,能够在实景影像上直接进行违法建筑的标注及登记,将转换后的点云数据与全景数据在空间上进行匹配,生成可量测的实景影像数据,这也是本文的关键技术之一。
(5)质量检查
由于光照、天气等因素,可能会造成影像曝光过度或颜色失真等现象,对影像质量不符合要求的需要重新进行采集,对符合要求的可存储到可量测实景影像数据库。
3.2 数据采集成果
移动测量系统违法建筑数据采集的成果主要包括采集线路数据和可量测实景影像数据。根据采集线路数据可将可量测实景影像进行空间位置关联,生成连续的实景影像[12]。利用该连续影像,规划监察执法人员不仅可以进行违法建筑巡查,而且可以通过点击电子地图上某一位置即可定位到相应的影像,实现随机巡查。
4 规划监察执法系统建设中的关键技术
在基于数据采集成果构建规划监察执法系统的过程中涉及两方面的关键技术,具体如下:
4.1 可量测全景影像生成技术
为了便于执法人员在全景影像上直接对违法案件进行标注、量测等操作,本文将点云数据与实景影像数据在空间位置上进行了精确匹配,生成了可量测的实景影像数据,算法步骤如下:
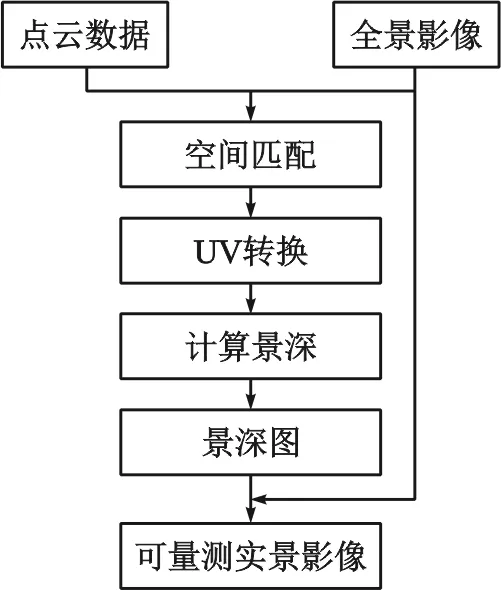
图3 可量测实景影像生成流程图
(1)空间匹配
假设点云数据中某点坐标为Pc(xc,yc,zc),其中xc,yc和zc是点Pc的三维世界坐标,1≤c≤N(N为点云数据中点的个数)。假设全景影像的位置与姿态为POS=(X,Y,Z,yaw,pitch,roll),其中X、Y和Z分别为全景影像的三维坐标位置;yaw,pitch和roll分别为全景影像的偏航值、俯仰值、侧滚值;
则与点Pc对应的全景影像中点P(x,y,z)的计算方法为:
(1)
其中R为旋转矩阵,表示为:
R=inv(Ryaw·Rpitch·Rroll)
(2)
其中inv为矩阵的逆,矩阵Ryaw,Rroll,Rpitch表示如下:
(3)
(4)
(5)
通过式(1),可将点云数据与全景数据进行空间位置的匹配。
(2)UV转换
根据下式,将全景影像坐标系中的点坐标p转换成全景影像的uv坐标:
(6)
其中α和β为方位角,计算方法为:
(7)
根据全景影像的uv坐标,计算全景影像景深图中的像素点(I,J):
(8)
其中W为景深图的宽度,为H景深图的高度,0<λ≤1。
(3)景深计算
全景影像景深图中像素(I,J)景深的计算方法为:
(9)
(4)生成景深图
按照上述步骤便可为全景影像生成其对应的景深图,在景深图的支持下,全景影像中的每个像素点都有其对应的空间三维坐标,可直接在全景影像上进行量测和标注,获得可量测的实景影像。
4.2 基于WebService的异构数据集成框架
由于规划监察执法系统涉及的数据来源较多,是一个多源异构的系统,为了提高系统的可扩展性,使用XML文档作为实现异构数据库中数据共享的桥梁,将异构数据库数据转换为XML文档,通过Web服务进行发送,到达目标数据库后再将XML文档中的数据转换为目标数据库中的数据。数据库集成框架如图4所示:
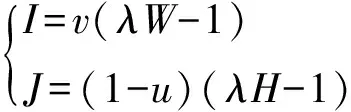
图4 基于WebService的异构数据集成框架
图4中,数据库层是各种异构系统的数据存储中心。当应用系统进行信息交换时,首先从数据层提取数据,生成相应的XML文档,然后带有XML的Web服务存放在Web服务器上,最终使共享信息(如案件发生地理位置)可以被相应的应用所利用,这些基于XML的Web服务构成了整个框架的服务层。描述数据的XML文件通过Web服务被放置在Internet上,当用户进行信息访问时,无须访问各应用系统的数据库,直接访问外置在Internet上的Web服务即可。UDDI注册中心负责应用系统资源的注册、发布及查询,将相应的共享数据聚集在全局数据库中。该架构的好处是将资源系统与共享数据在物理层次上进行分离,避免资源系统直接暴露在Internet下,从而降低了访问风险,减轻了资源系统服务器的网络连接负担。
5 规划监察执法系统的建设与应用
本文以重庆主城区为实验区,按照本文的数据采集方案,采用移动测量系统进行了重庆主城区 500 km的违法建筑数据采集,并对数据进行了处理及质量检查,基于采集的成果数据,在重庆市违反城乡规划建设举报中心平台已有功能(案件投诉、案件咨询、案件登记、违法建筑处理等案件处理基本流程、地图服务等)的基础上,集成了实景影像服务,提供实景巡查、违法案件实景浏览等功能,并与案件处理流程进行了融合,形成了案件处理闭环。主要应用如下:
5.1 违法案件实景浏览
系统对违法案件与实景影像进行了关联,规划监察执法人员可通过点击违法案件直接查看与该案件关联的实景影像数据,例如,案件编号为201702160001的实景影像如图5所示:

图5 违法案件实景浏览
同时,点击全景影像中的热点标记,可查看案件详情,包括案件编号,业务类型,案件发生地等,若为群众举报的案件,还可以登记举报人姓名、举报人电话号码等信息。
5.2 实景巡查
巡查人员可以进行360°巡查,在发现违法建筑后,可对违法建筑直接登记,并且可对违规建筑进行测量,此外,地图与全景的地理位置关联可支持跳转浏览。实景巡查系统如图6所示。
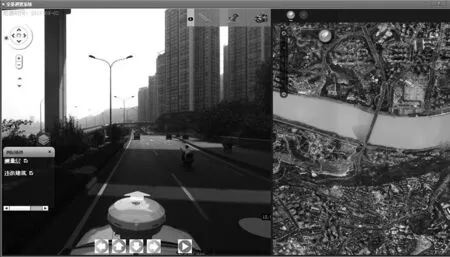
图6 实景巡查
通过与重庆市违反城乡规划建设举报中心的集成,极大地提高了规划监察执法的效率。执法人员在接到群众举报后,可首先在该系统中对违法现象进行核实,然后通过案件发生地了解违法现象的位置及周边环境,再到现场进行取证、核实及进一步处理。通过定期采用移动测量系统对违法违规建筑进行数据采集,可以实现数据的周期性更新,执法人员可通过实景巡查功能对采集线路周边的违法现象及时发现、登记与处理。
利用该系统,可满足规划监察执法人员的日常巡查及案件追踪等需求,提高工作效率。
6 结 语
作为一种新兴的三维点云数据与影像数据获取技术,移动测量技术能够快速、准确的完成违法建筑的数据采集,通过将数据成果与重庆市违反城乡规划建设举报中心平台集成,提供实景巡查、违法案件实景浏览等功能,并与案件处理流程进行了融合,形成了案件处理闭环。实验证明,将移动测量技术应用于城市规划建设执法工作中能够极大提高执法人员的工作效率,具有可行性和优越性。本文的研究工作可以为今后移动测量技术在规划监察执法领域的推广应用提供参考。此外,由于车载移动测量技术的视野有限,只能获取地面一定高度范围内的违法建筑数据,将其与机载移动测量技术相结合,将是今后研究的一个方向。
[1] 徐建新,张光伟,羌鑫林等. 激光测量采集车在城市部件调查中的应用[J]. 测绘与空间地理信息,2013,36(S1):237~239.
[2] 杨伯钢,韩友美. 车载移动激光扫描技术大比例尺测图技术分析[J]. 测绘科学,2013,38(1):106~108+15.
[3] 李琴. 车载移动测量系统的数据处理及应用[J]. 测绘通报,2014(S2):129~132.
[4] 羌树华,林晓菲. 车载激光移动测量技术在数字城管部件数据采集中的应用研究[J]. 现代测绘,2012,35(6):31~32+44.
[5] 邓学锋,贺雅辉,高宇. 无人机大比例尺航测系统的研制及应用[J]. 测绘通报,2017(6):87~89,141.
[6] 吴波,杨晓锋,陈宏强等. 应用车载移动测量技术进行大比例尺测图的方法[J]. 测绘通报,2017(3):80~82,107.
[7] 蒋桂美,聂倩,陈小松. 利用机载激光点云数据生产DEM的关键技术分析[J]. 测绘通报,2017(6):90~93.
[8] 王永红,陈宏强,杨晓锋等. 车载移动测量系统在市政管线地形图测量中的精度分析[J]. 测绘通报,2017(5):82~84,99.
[9] 邓仕虎,徐文卓. 基于移动GIS的城乡规划监察执法信息系统[J]. 地理空间信息,2012,10(3):130~133+1.
[10] 陈世宏,王雷,陈庆华等. 基于3S技术的数字城市规划监察系统构建[J]. 测绘与空间地理信息,2011,34(1):95~99+104.
[11] 商振伟. 移动GIS和CORS技术在规划执法监察中的应用研究[D]. 兰州:兰州交通大学,2013.
[12] 谢洪,吴博义,龚珣等. POS辅助下的车载序列影像匹配[J]. 测绘通报,2017(4):44~48.
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
家庭影院技术(2020年11期)2020-12-28 01:22:36
英美文学研究论丛(2018年1期)2018-08-16 03:00:54
河南水利年鉴(2017年0期)2017-05-19 02:29:21
北方音乐(2017年4期)2017-05-04 03:40:09
家庭影院技术(2017年12期)2017-02-06 02:32:12
特别文摘(2016年21期)2016-12-05 17:53:36
中国环境监察(2016年9期)2016-10-24 05:26:44
中国环境监察(2016年5期)2016-10-24 05:26:00