基于DSC和MLP的欠驱动船舶自适应滑模轨迹跟踪控制
2018-03-14 02:28:33沈智鹏
系统工程与电子技术 2018年3期
沈智鹏, 王 茹
(大连海事大学信息科学技术学院, 辽宁 大连 116026)
0 引 言
船舶运动控制是控制理论应用于航海领域的一个重要的研究课题,船舶运动的目的在于提高船舶自动化水平,进而能够保证船舶在航行过程中的安全性、经济性以及舒适性[1]。目前,海上航行的大多数船舶仅装备螺旋桨主推进器和舵装置用以船舶推进和操纵,是一类典型的欠驱动系统。欠驱动船舶的镇定控制、路径和轨迹跟踪控制等问题一直是不少船舶运动控制理论研究者关注的热点。
近年来,对船舶航迹跟踪控制问题的研究,已有诸多成果。如文献[2-3]基于Lyapunov直接法和坐标转换,在保证航向角速度满足标准持续激励条件下,设计船舶轨迹跟踪控制律。这些控制律的设计都必须保证船舶模型参数是已知的。此外,文献[4-5]基于backstepping思想设计船舶航迹跟踪控制律,实现了对船舶轨迹跟踪的有效控制。文献[6]在已知外界干扰有界的情况下,利用逆推法将船舶运动的控制律分解为两个子回路进行设计,提出了一种基于干扰界已知的滑模控制策略。但是采用传统的backstepping方法设计控制器存在“微分爆炸”问题,不利于工程实践,文献[7-9]采用动态面控制(dynamic surface control,DSC)思想,在以往backstepping技术的基础上加入了一阶低通滤波器,避免状态量在进行微分计算时存在“微分爆炸”问题,简化控制律设计,易于工程实践。
然而船舶在实际航行中,除了遭受风、浪、流等外界环境干扰外,其自身的质量、速度、惯性矩等性能也会随之变化,导致船舶模型参数也跟着发生一定的变化。为了克服船舶模型参数的不确定性和外界风、浪、流等干扰的影响,文献[10]在控制器的设计中利用自适应神经网络的万能逼近特性估计船舶动态不确定,并根据Lyapunov稳定性原理证明船舶闭环系统中所有信号一致最终有界。文献[11]针对欠驱动船舶的路径跟踪问题,设计了神经网络稳定自适应控制器,并对风、浪、流等外界环境干扰进行自适应补偿。文献[12]为实现在参数摄动和外界环境干扰影响下对船舶路径跟踪的控制,运用滑模和神经网络这两种技术设计了一种基于神经滑模鲁棒控制器。文献[13]在欠驱动船舶的路径跟踪问题上,利用神经网络算法对强化学习的参数进行优化,增强了所设计控制器的自适应性。文献[14]针对无人水面艇的航迹跟踪问题,在无人艇存在建模误差以及外界干扰的情况下,利用神经网络技术,设计出一种自适应径向基函数(radial basis function,RBF)神经网络控制器,该控制器具有较强的鲁棒性。不过,采用神经网络技术需要在线估计神经网络的权值向量,不可避免的增加了控制算法的计算负载,也就是所谓的“维数灾难”问题。这一问题可以采用最小学习参数(minimal learning parameter,MLP)方法[15]予以解决。MLP法是通过在线估计神经网络权值向量范数,从而使得所提出的自适应律不依赖于神经网络节点数。文献[16]在对大气变化非常敏感的超音速飞行器中,采用DSC和MLP结合起来设计控制器,利用简单的自适应算法就能够实现对动态不确定的估计,在线更新计算负担大大减少。文献[17]将采用MLP代替神经网络控制算法,应用于三自由度欠驱动船舶上,从而降低了该控制算法的计算负担,最后,通过Lyapunov原理证明了所设计控制律的有效性。
考虑欠驱动船舶轨迹跟踪存在模型参数不确定以及在实际航行中不可避免的遭受外部环境干扰的问题,设计了一种自适应神经网络滑模控制方法。通过引入DSC技术避免传统backstepping方法带来“微分爆炸”问题,采用MLP方法用于避免“维数灾难”问题,并以单参数在线学习代替所有权值在线学习,从而使其计算负载降低,更符合工程要求。利用Lyapunov稳定性原理证明所设计控制律可使欠驱动船舶沿期望轨迹航行,并保证欠驱动船舶轨迹跟踪闭环系统中轨迹跟踪误差信号一致最终有界,最后利用一艘“BAY CLASS”远程巡逻船的仿真实验对所设计控制器的有效性进行分析和验证。
1 问题描述
考虑船舶前向、横荡和艏摇3个自由度的水平面运动,则存在模型参数不确定性和外界环境干扰影响的欠驱动水面船舶的运动学和动力学模型可表示为
(1)
式中

为实现欠驱动船舶轨迹控制律的设计,引入以下假设。
控制目标:针对三自由欠驱动船舶非线性数学模型(1),在满足假设1和假设2的条件下,考虑船舶存在模型不确定和外界环境干扰的情况,设计前向推进力τu和转向力矩τr使得所设计船舶能够沿期望轨迹航行,并保证船舶系统中轨迹跟踪误差信号一致最终有界,实现对欠驱动船舶轨迹跟踪的有效控制。
2 自适应滑模轨迹跟踪控制律设计
为后续设计船舶系统控制律的需要,定义误差变量
(2)
式中,(xd,yd)为船舶的参考轨迹;xe、ye分别为纵向位置误差和横向位置误差;ue、ve分别为前向速度误差和横漂速度误差,根据船舶的参考轨迹和实际位置信息可设计虚拟控制律。
为了实现对船舶轨迹跟踪位置误差趋于零,对式(2)中的xe和ye求导可得
(3)
并将ue和ve代入式(3)得
(4)
设计虚拟控制律,即
(5)
式中,k1、k2>0为设计常数。
将式(5)代入到式(4)可得
(6)
即
(7)
由式(7)可知,当ue、ve收敛于零时
(8)
由式(8)可知,位置误差xe、ye将收敛于零,即实现对船舶轨迹跟踪的控制。
2.1 纵向推力的最小参数自适应滑模控制律设计


(9)
式中,λ1>0为设计常数。
对一阶滑模面(9)求导可得
(10)
从式(10)可以看出,如果采用传统的backstepping对虚拟控制量αu直接求导,将会增加计算复杂程度。为了解决这个问题,依据动态面控制思想[18],对αu引入一阶低通滤波器,并设新的状态量Xu∈R为一阶滤波器的输出,其数学表达式为
(11)
式中,T1>0为滤波时间常数。
(12)
所产生的滤波误差为y1=Xu-αu。
对y1关于时间求导,结合式(5)和式(12)得

(13)
式中,β1(·)为非线性连续函数。

(14)
式中,ε1>0,η1>0为设计常数。
由于式(14)中的fu存在有船舶动态不确定项,不能直接用于控制律的设计,故采用RBF神经网络控制算法对未知项进行逼近。RBF神经网络是一种3层前馈网络,包括输入层、隐含层和输出层。RBF神经网络自学习能力较强,可以对任意函数进行逼近,避免了对未知函数进行复杂的数学理论分析,简化控制结构。图1为多输入单输出的RBF神经网络结构图。

图1 RBF神经网络拓扑结构Fig.1 RBF neural networks topology architecture
RBF神经网络输入层、隐含层节点数量分别为m、n,输出为1。x=[x1x2…xm]T∈Rm为网络的输入向量,则神经网络高斯基函数的输出表达式为
(15)
式中,bj>0为高斯基函数的宽度,j为神经网络隐含层的第j个节点;cj=[c1,c2,…,cm]T∈Rm为第j个隐层神经元的中心点向量值,与输入向量x的维数相同。
对于系统中的含有参数不确定函数fu的神经网络输出表达式为
(16)
式中,Z=[u,v,r]T为神经网络的输入,h(Z)=[h1(Z),h2(Z),…,hj(Z)]T为神经网络的高斯基函数输出;Wu∈Rj×1为神经网络的理想权值,δ1为神经网络的逼近误差,且满足|δ1|≤δU,δU为误差的界值。
假设用于逼近fu的神经网络权值Wu有界,即‖Wu‖≤WU,令
(17)
设计参数自适应律为
(18)
式中,Γu>0,ξ1>0为设计常数。根据式(17)和式(18)设计纵向推进力控制律,即
(19)

避免参数漂移的的方法有死区法和σ-修正法等,由于采用死区法要设置死区宽度,宽度过大时,会导致系统误差趋于一个较大的死区,影响船舶闭环系统的精度,故为了克服死区问题,设计带有“σ-修正”的单参数自适应律

(20)
式中,γ1>0,σ1>0为设计常数。故纵向推进力控制律式(16)变换为

(21)

证明定义Lyapunov函数为
(22)
对于给定的正数B0、ϖ0,考虑如下紧集:

注意到Ωd×Ω1也是紧集,且非线性连续函数β1(·)在Ωd×Ω1紧集内有最大值Nu。所以
(23)
式中,α1为正常数。
对式(22)求导,并将式(10)、式(21)、式(23)代入可得



(24)
根据文献[19]的Young’s不等式,可得式(25)和式(26)成立
(25)
(26)
可得



(27)
(28)
将式(28)代入到式(27)可得
(29)
式中
μ1=min{(2η1-1),2(1/T1-α1,σ1}
2η1-1>0
1/T1-α1>0

(30)
证毕
2.2 转向力矩的最小参数自适应滑模控制律设计

(31)
对二阶滑模面式(31)求导可得
(32)
由式(5)得

(33)
为方便后续表达式简洁,令
(34)
为防止对P直接求导出现项数滋升,对P引入一阶低通滤波器,并设新的状态量XP∈R为一阶滤波器的输出,其数学表达式为
(35)
式中,T2>0为滤波时间常数。
(36)
定义滤波误差为y2=XP-P。

(37)
故
(38)

对y2关于时间求导,结合式(5)、式(36)得

(39)
式中,β2(·)为非线性连续函数。
与前面纵向推力的自适应滑模控制律设计类似,式(38)中存在含有动态不确定的fr,采用RBF神经网络进行逼近,表达式为
(40)
式中,Wr为神经网络的理想权值;δ2为神经网络的逼近误差且|δ2|≤δR。

设计带有“σ-修正”的参数自适应律为

(41)
式中,γ2>0、σ2>0为设计常数。


(42)
式中,ε2>0、η2>0为设计常数。
证明定义Lyapunov函数:
(43)
对于给定的正数B0、ϖ2,考虑如下紧集

注意到Ωd×Ω2也是紧集,且非线性连续函数β2(·)在Ωd×Ω2紧集内有最大值NP。所以结合式(39)可得
(44)
式中,α2为正常数。
对式(43)求导并将式(38)、式(41)、式(42)、式(44)代入得



(45)
根据文献[19]的Young’s不等式,可得式(46)和式(47)成立
(46)
(47)
代入式(45)可得

(48)
与式(28)相同,考虑不等式:
(49)
代入式(48)得
(50)
式中
μ2=min{(2η2-1),2(1/T2-α2),σ2}
2η2-1>0
1/T2-α2>0
(51)
证毕
3 稳定性分析
综上所述,通过设计纵向推力控制律τu和转向力矩控制律τr,分别满足了式(30)和式(50)可达条件,保证系统运动状态可在有限时间内趋向并保持在相应的滑模面s1和s2,同时所设计的两个滑模面是渐进收敛于原点的。所以系统运动点也会以指数速率收敛于原点,即满足
(52)
当速度误差ue、ve趋于0时,由式(8)可知,位置误差xe、ye也将趋于0,故船舶运动的实际轨迹能够很好沿参考轨迹航行。
为证明船舶的艏摇角速度r是有界输入有界输出,定义如下Lyapunov函数:
(53)
由船舶模型式(1)可知
(54)
式中,Δfr为船舶动态未知不确定项,其他项为已知项,本文对fr进行了逼近,故Δfr可由式(54)得到,后续证明可直接应用Δfr。
对式(53)求导得
m33Δfr+br+τr]
(55)

4 仿真研究
为了验证本文所设计的带“σ-修正”的DSC和MLP自适应滑模控制方法的有效性,应用文献[20]中一艘单桨单舵的远程巡逻船进行仿真研究,该船长为38 m,质量为m=118×103kg,其他参数为m11=120×103kg,m22=177.9×103kg,m33=636×105kg,du=215×102kg/s,dv=147×103kg/s,dr=802×104kg/s,du2=0.2,du,du3=0.1,du,dv2=0.2dv,dv3=0.1dv,dr2=0.2dr,dr3=0.1dr,系统的不确定性部分取为
外界风浪流产生的干扰力和力矩取为
应用本文设计的基于DSC和MLP的自适应滑模控制器进行船舶轨迹跟踪控制,仿真结果如图2~图8所示。图2表示选用两种不同的算法欠驱动船舶参考轨迹曲线xd、yd和实际运动轨迹曲线x、y。从图2中曲线可以看出,本文算法可以使船舶快速的跟踪上参考轨迹,并且保持稳定跟踪状态,具有较好的跟踪能力,而采用文献[6]中的算法基本上能跟踪上参考轨迹,并且所用的时间较长。图3和图4分别为位置误差收敛曲线和速度误差收敛曲线,从图3、图4中可以看出,位置误差和速度误差都基本收敛于零,但采用滑模控制算法的位置误差xe和速度误差ue、ve在零附近波动较大,从位置误差ye曲线图可以看出采用滑模控制算法需200 s能够跟踪预期的轨迹,采用本文算法40 s就可以使船舶运动在预期轨迹上航行。

图2 初始位置在圆内的轨迹跟踪控制Fig.2 Trajectory tracking control of the vessel with initial position inside the circle

图3 位置误差收敛曲线Fig.3 Convergence of position errors
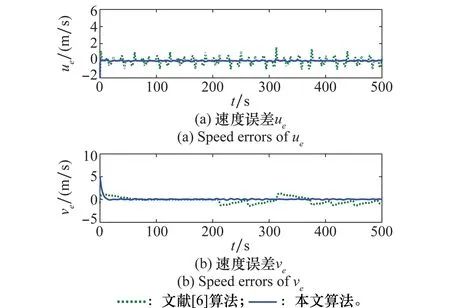
图4 速度误差收敛曲线Fig.4 Convergence of speed errors

图5 轨迹跟踪控制输入τu变化曲线Fig.5 Trajectory tracking control input τu curves

图6 轨迹跟踪控制输入τr变化曲线Fig.6 Trajectory tracking control input τr curves

图7 纵向动态阻尼的逼近曲线 Fig.7 Approximation curve of surge dynamic damping

图8 转向动态阻尼的逼近曲线Fig.8 Approximation curve of yaw dynamic damping
图5和图6为船舶的控制输入,表明采用本文算法转向力矩τr在前10 s有抖振现象是由于船舶起始点偏离参考轨迹初始位置较大造成的,经过一段时间的调节后变为光滑的曲线,符合实际的控制要求。采用滑模控制算法使船舶系统的控制输入出现抖振现象,而且不可消除。图7和图8表示不确定函数fu和fr的真实值和估计值,从图中可以看出带有“σ-修正”的MLP能很好地估计船舶模型参数中的动态变量。

图9 初始位置在圆外的轨迹跟踪控制Fig.9 Trajectory tracking control of the vessel with initial position inside the circle
5 结 论
针对欠驱动船舶存在模型参数不确定和外界环境干扰的轨迹跟踪控制问题,提出了一种基于DSC和MLP的自适应滑模控制方法。该方法克服了文献[6]模型参数先验知识的局限性,并消除了符号函数带来的抖振问题。引入DSC的目的是为了避免传统的backstepping方法对虚拟控制直接求导存在的“微分爆炸”问题,采用带有“σ-修正”的MLP以单参数在线学习代替神经网络控制算法中所有权值在线学习,既减少控制律的计算量,避免出现“维数灾难”问题,又能防止参数漂移,易于工程实践,仿真结果证明了该算法的有效性。
[1] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: Wiley,2011.
[2] JIANG Z P. Global tracking control of underactuated ships by Lyapunov’s direct method[J].Automatica,2002,38(2):301-309.
[3] DONG W J,GUO Y. Nonlinear tracking control of underactuated surface vessel[C]∥Proc.of the IEEE American Control Conference, 2005:4351-4356.
[4] GHOMMAM J,MNIF F,BENALI A,et al. Asymptotic back stepping stabilization of an underactuated surface vessel[J]. IEEE Trans.on Control Systems Technology,2006,14(6):1150-1157.
[5] SØRENSEN M E N,BJØRNE E S,BREIVIK M. Performance comparison of backstepping-based adaptive controllers for marine surface vessels[C]∥Proc.of the IEEE Control Applications,2016:891-897.
[6] 朱齐丹,于瑞亭,夏桂华,等. 风浪流干扰及参数不确定欠驱动船舶航迹跟踪的滑模鲁棒控制[J]. 控制理论与应用,2012,29(7):959-964.
ZHU Q D,YU R T,XIA G H,et al. Sliding-mode robust tracking control for underactuated surface vessels with parameter uncertainties and external disturbances[J]. Control Theory & Applications,2012,29(7):959-964.
[7] AMEZQUITA S K,YAN L,BUTT W A,et al. Dynamic surface control for a class of nonlinear feedback linearizable systems with actuator failures[J]. IEEE Trans.on Neural Networks & Learning Systems,2017,28 (9):2209-2214.
[8] 杜佳璐,杨杨,胡鑫,等. 基于动态面控制的船舶动力定位控制律设计[J]. 交通运输工程学报,2014,14(5):36-42.
DU J L,YANG Y,HU X,et al. Control law design of dynamic positioning for ship based on dynamic surface control[J]. Journal of Traffic and Transportation Engineering,2014,14(5):36-42.
[9] 王昊,王丹,彭周华,等. 多自主船协同路径跟踪的自适应动态面控制[J]. 控制理论与应用,2013,30(5):637-643.
WANG H,WANG D,PENG Z H,et al. Adaptive dynamic surface control for cooperative path following of multiple autonomous surface vessels[J]. Control Theory & Applications,2013,30(5):637-643.
[10] DU J L,HU X,LIU H B,et al. Adaptive robust output feedback control for a marine dynamic positioning system based on a high-gain observer[J]. IEEE Trans.on Neural Networks & Learning Systems,2015,26(11):2775-2786.
[11] 刘杨,郭晨,沈智鹏,等.欠驱动船舶路径跟踪的神经网络稳定自适应控制[J]. 控制理论与应用,2010,27(2):169-174.
LIU Y,GUO C,SHEN Z P,et al. Stable adaptive neural network control of path following for underactuated ships[J]. Control Theory & Applications,2010,27(2):169-174.
[12] 杨震,刘繁明,王岩. 欠驱动船舶路径跟踪的神经滑模控制[J]. 中国造船,2015,56(2):45-55.
YANG Z,LIU F M,WANG Y. Path following of underactuated surface vessels based on neural sliding mode[J]. Shipbuilding of China,2015,56(2):45-55.
[13] 沈智鹏,代昌盛. 欠驱动船舶路径跟踪的强化学习迭代滑模控制[J]. 哈尔滨工程大学学报,2017,38(5):697-704.
SHEN Z P,DAI C S. Iterative sliding mode control based on reinforced learning and used for path tracking of underactuated ship[J].Journal of Harbin Engineering University,2017,38(5):697-704.
[14] LI C H,ZHAO Y S, WANG G F, et al. Adaptive RBF neural network control for unmanned surface vessel course tracking[C]∥IEEE International Conference on Information Science & Technology, 2016:285-290.
[15] 刘程,李铁山,陈纳新. 带有舵机特性的船舶航向自动舵DSC-MLP设计[J]. 哈尔滨工程大学学报,2012,33(1):9-14.
LIU C,LI T S,CHEN N X. Dynamic surface control and minimal learning parameter (DSC-MLP) design of a ship’s autopilot with rudder dynamics[J]. Journal of Harbin Engineering University,2012,33(1):9-14.
[16] XU B,YU L,WANG S X,et al. Neural dynamic surface hypersonic flight control using minimal-learning-parameter technique[C]∥Proc.of the IEEE International Conference on Unmanned Aircraft Systems,2014:960-966.
[17] ZHANG G Q,ZHANG X K. Concise robust adaptive path-following control of underactuated ships using DSC and MLP[J]. IEEE Journal of Oceanic Engineering,2014,39(4):685-694.
[18] SWAROOP D,HEDRICK J K,YIP P P,et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Trans.on Automatic Control,2000,45(10):1893-1899.
[19] CAI J,WEN C,SU H,et al. Adaptive backstepping control for a class of nonlinear systems with non-triangular structural uncertainties[J].IEEE Trans.on Automatic Control,2017,62(10): 5220-5226.
[20] DO K D,JIANG Z P,PAN J. Robust adaptive path following of underactuated ships[J]. Automatic,2004,40(6):929-944.
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
现代装饰(2018年5期)2018-05-26 09:09:39
制造技术与机床(2017年6期)2018-01-19 02:41:07
中国三峡(2017年2期)2017-06-09 08:15:29
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54