
PLC基于Modbus通讯的控制系统研究
2018-03-14 03:44闫秀芳王志国高晓辉
制造业自动化 2018年2期
闫秀芳,王志国,高晓辉
(1.内蒙古化工职业学院 测控与机电工程系,呼和浩特 010070;2.内蒙古工业大学 机械学院,呼和浩特 010051;3.北京航空航天大学 自动化科学与电气工程学院,北京 100191)
0 引言
随着工业技术的发展,由上位机和下位机组成的控制系统得到日益广泛的应用,而下位机控制器的处理速度以及实时性是决定整个伺服控制系统性能的关键所在[1,2]。常用的下位机控制器主要包括可编程序控制器(PLC)、工控机、运动控制卡等[3~5]。S7300 PLC因其具有结构紧凑、循环周期短、处理速度高、指令集功能强、电磁兼容性强、抗震动冲击性能好、性价比高等诸多优点,使其广泛的应用于工业控制领域中,成为一种既经济又切合实际的解决方案[6,7]。Modbus通讯协议是美国Modicon公司开发的一个开放性通信协议,具有安全、稳定、实时性高等特点,已经成为一种通用的工业通讯标准,在很多工业领域得到了广泛的应用[8~10]。本文在分析控制系统特点的基础上提出运用S7300 PLC作为下位机通过SSI通讯实时采集位置信息,并通过接收上位机控制指令同时实现多路闭环伺服控制;采用S7200 PLC通过Modbus通讯接收上位机指令并通过MPI通讯与S7300 PLC实现数据共享,从而组成一个数据共享网络。S7200 PLC的引入不但能够实现性价比较高的Modbus通讯且可实现数字量控制,从而组成一个性价比较高的稳定控制系统。采用本控制系统方案能够实现多路位移精确控制,且具有性价比高、适用性强等诸多优点,进一步推进了PLC在很多工业领域的应用。
1 控制系统结构
在很多精密位置控制系统中,传感器、执行器和控制器作为主要组成部件,对于提高系统的控制精度至关重要。本系统的位姿调整机构的工作原理如图1所示,通过控制器实现对3个液压缸精密位移控制来实现平台位姿的调整,因此,控制器的性能至关重要。位姿调整机构的电气控制原理如图2所,其基本工作原理是:通过Modbus通讯协议接收上位机位移控制指令;通过基于SSI通讯的位移绝对编码器采集位置信息;指令和采样通过控制算法形成控制指令下发给伺服阀实现对液压缸的伺服控制;限位开关用来实现对位姿调整机构的安全保护。该控制系统需要1路Modbus通讯接口、4路DI开关量输入、4路DO开关量输出、3路AO输出、3路SSI通讯接口。

图1 位姿调整机构
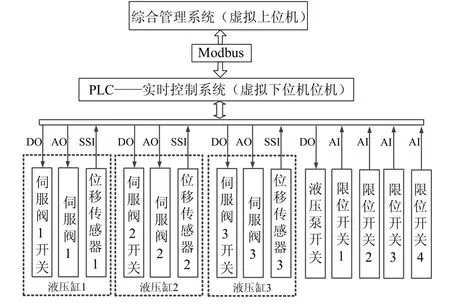
图2 电气控制系统
由于S7300 PLC的处理速度和工作性能远远的高于S7200 PLC,实时控制周期可达到10ms,在很多高精度伺服控制系统中得到了广泛的应用,而且S7200不能够进行SSI通讯,因此选用S7300 PLC作为下位机控制器实现对液压缸位移的精确实时控制。S7300 PLC的通讯接口主要面向Profibus通讯总线,而基于Modbus通讯的模块主要有CP340和CP341模块且其价格比较昂贵[11,12],而S7200 PLC主要面向Modbus通讯设计含有2路Modbus通讯接口,选用S7200 PLC通过Modbus通讯协议接收上位机指令,且能够提供IO控制接口,性价比较高。S7300 PLC和S7200 PLC通过MPI通讯进行信息共享。因此,根据本系统的特点选用性价比较的产品组合如下:CPU 314(6ES73141AG140AB0)、SM338模块(设备号:6ES73384BC010AB0,含有4路 SSI 通讯接口)、SM332模块(设备号:6ES73325HD010AB0,含有4路AO)、CPU 224XP(设备号:6ES72142AD230XB0,含14路DI、8路DO、2路RS485)。
2 S7300 PLC基于Modbus通讯
由于S7300 PLC通过Modbus接口进行通讯价格比较昂贵,因此选用S7200 PLC作为从站通过Modbus接口与上位机通讯,然后S7200 PLC通过MPI通讯接口与S7200 PLC进行通讯。
2.1 S7200与上位机Modbus通讯
ModBus协议是一种可靠而有效的工业控制系统通信协议,现已被众多的硬件厂商支持并得到了广泛应用,通过ModBus协议可以方便地完成现场控制网络的数据传输。Modbus是一种主/从串行通讯协议且网络中只有一个主站其余全为从站,在物理层上可利用232和485接口,支持ASCII和RTU两种传输模式,用户根据系统组态,在同一个Modbus网络上配置相同的通信参数。S7-200CPU上的通信口Port0和Port1均可实现Modbus 通讯,从站协议指令主要有“MBUS_INT”和“MBUS_SLAVE”指令。在第一个循环周期内执行“MBUS_INT”指令(如图3所示),下面分别介绍一下“MBUS_INT”指令中个参数的意义。Mode:模式选择,1为启动,0为停止;Addr:从站地址取值为1~247;Baud:波特率可选1200,2400,4800,9600,19 200,38400,57600,115200;Parity:奇偶校验为0为无校验,1为奇校验,2为偶校验;Delay:延时,缺省值为0;MaxIQ:最大I/Q位,参与通信的最大I/O点数,S7-200的I/O映像区为128/128,缺省值为128;MaxAI为最大AI字数,参与通信的最大AI通道数,可为16或32;MaxHold:最大保持寄存器区,参与通信的V存储区字;HoldStart:保持寄存器区起始地址,以&VBx指定(间接寻址方式);Done:初始化完成标志,成功初始化后置1;Error:初始化错误代码。主站和从站的波特率和奇偶校验位的设置参数必须相同,当S7200 PLC作为从站时只需要设置MBUS_INT”指令参数即可。S7-200作为从站时,内部的数据存储区与Modbus的4类地址的对应关系如表1所示,在进行数据变量传输时,采用4类地址传输,只需设置HoldStart的起始变量地址即可。

表1 S7-200的Modbus地址对应关系

图3 “MBUS_INT”指令
2.2 S7300与S7200之间MPI通讯
MPI(Multi Point Interface)是多点接口的简称,是西门子公司开发的用于PLC之间通讯的保密的协议。MPI通讯是当通信速率要求不高、通信数据量不大时,可以采用的一种简单经济的通讯方式。S7300与S7200之间采用MPI通讯时,S7200不需要编写任何与通讯有关的程序,只需要将要交换的数据存储到一个连续的V存储区域内与S7300中数据存储区一一对应即可。S7300需要在OB1或OB35中调用系统功能X_GET(SFC67)和X_PUT(SFC68)(如图4所示),下面对指令中各个参数进行介绍。X_GET为S7300接收S7200数据指令,X_PUT为S7300发送给S7200数据指令。REQ:“Request to activate” 当REQ=1时,调用该指令可以启动读取操作;CONT:如果在第一次调用时选择了CONT=0,那么在数据传送完成后,连接被再次终止,如果在第一次调用时选择了CONT=1,那么在数据传送完成后仍保持连接;DEST_ID:寻址参数“destination ID”,包含通信伙伴的MPI地址;VAR_ADDR:指向伙伴CPU上区域的引用,数据将从该区域读出;RET_VAL:指令执行过程中,如果出错,则返回值将包含有相应的错误代码;BUSY:BUSY=1表示接收仍未完成,BUSY=0表示接收已完成,或者没有激活的接收操作;RD:指向接收区的引用;SD:指向发送区的引用。S7300与S7200之间采用MPI通讯时,S7300与S7200设置不同的MPI地址和相同的波特率方可进行通讯。

图4 “X_GET”和“X_PUT”指令
3 PLC下位机控制系统
PLC是以微处理器为基础的一种自动控制装置,其综合了控制、计算机和通讯技术的功能,是一种数字运算操作的电子系统,尤其S7300 PLC因其循环周期短且处理速度高可应用于实时控制系统中。位姿调整机构的控制系统的硬件连接如图5所示,在本控制系统中采用S7300 PLC作为下位机控制系统,通过Modbus通讯和MPI通讯接收上位机控制指令,采用SM338模块中的SSI通讯实时采集位移信息,通过PID运算控制算法根据控制指令和位移采样生成控制信号通过SM332模拟量输出模块的AO接口控制伺服阀从而实现对液压缸的伺服控制。
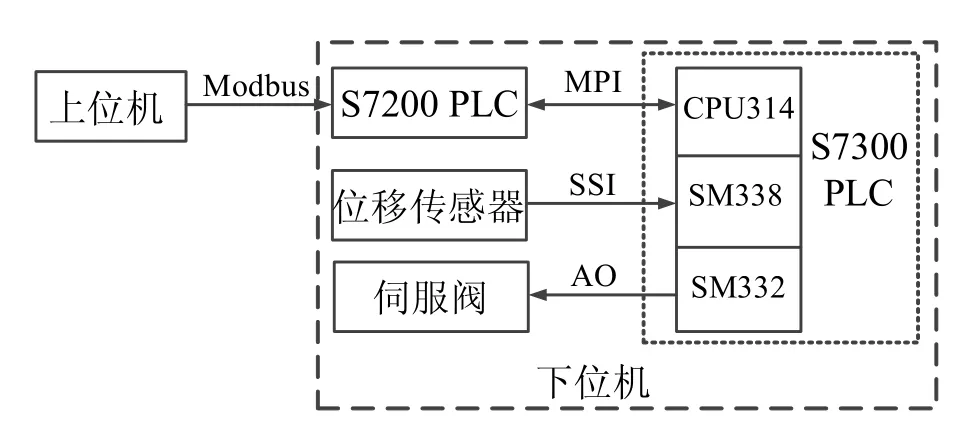
图5 控制系统硬件连接图
SSI(Synchronous Serial Interface)是一种同步信号的全双工串行数据协议,常用于较多高精度绝对值角度编码器中。SM338模块中含有4路SSI通讯接口与其电气接线如图6所示,将SM338与S7300 PLC的CPU直接相联接并根据位移编码器的具体参数对其进行设置(如图7所示)。
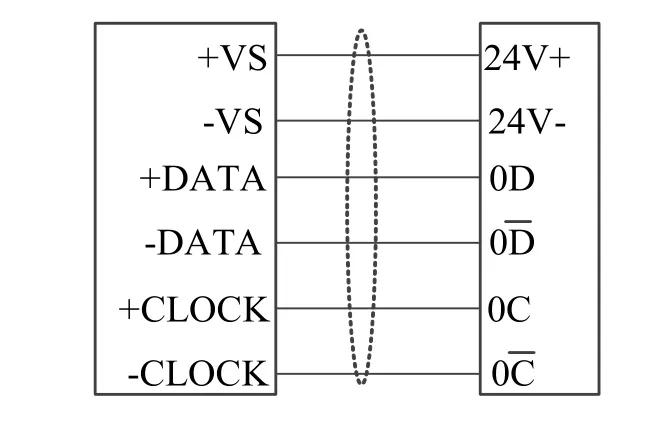
图6 SSI通讯接线图
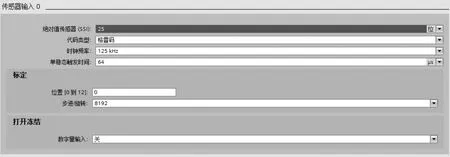
图7 S7300 PLC中SSI通讯参数设置
将本控制系统实现对位姿调整机构中3个液压缸的位移控制的试验结果如图8所示,从图8中可以看出,三个液压缸的定位精度均可控制在0.1mm以内。
4 结论
本文介绍了S7200和S7300 PLC的性能特点并搭建了一套性价比比较高的高精度控制系统,采用Modbus实现上位机与S7300 PLC之间通讯并实现了对液压缸的精确位移控制,进一步推进了PLC的工业应用范围。

图8 位移响应曲线
[1]丛明,刘冬,杜宇,等.PLC伺服控制在太阳能电池组件搬运机械手中的应用[J].组合机床与自动化加工技术,2011,9:66-69.
[2]Yongguang Liu, Xiaohui Gao, Xiaowei Yang. Research of Control Strategy in the Large Electric Cylinder Position Servo System[J].Mathematical Problems in Engineering,2015.
[3]吕华芳,杨汉波,丛振涛.基于PLC控制的室内降雨入渗自动测定系统[J].农业机械学报,2014,45(9):144-149.
[4]Yongguang Liu,Xiaohui Gao, Zhongcai Pei. Research of Impact Load in Large Electrohydraulic Load Simulator. Mathematical Problems in Engineering[J].2014.
[5]项小东,白国振.基于运动控制卡的伺服控制系统开发研究[J].机电工程技术,2017,39(11):20-22.
[6]黎鑫溢,谭建平,周俊峰.PLC数据通讯在水压机控制系统中的实现与研究[J].微计算机信息,2006,22(4-1):78-81.
[7]李红萍,贾秀明,李艺鸿.基于MCGS的S7300 PLC液位监控系统设计[J].自动化与仪器仪表,2013,1:55-59.
[8]王彦齐.西门子S7-300 PLC的Modbus-RTU通讯实现[J].煤矿机械,2014,35(5):204-205.
[9]顾海勤,杨奕,全毅,等.基于ModBus协议的智能仪表与PC机双向通信设计[J].仪表技术与传感器,2013(12):33-35.
[10]陈铭.基于MODBUS协议的设备和PLC实现通信的研究[J].湖南科技学院学报,2009,30(4):60-62.
[11]蒋天伟,赵京.Modbus RTU通信在CP340系统上的实现[J].通信技术,2010,43(8):253-257.
[12]董明.基于PROFIBUS-DP总线和S7300的电机调速系统设计[J].制造业自动化,2011,33(4):134-136.
猜你喜欢
小康(2021年13期)2021-05-11
中国惯性技术学报(2020年4期)2020-12-14
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
电子技术与软件工程(2019年6期)2019-04-26
综合智慧能源(2019年1期)2019-01-29
科技与创新(2018年1期)2018-12-23
家庭影院技术(2018年3期)2018-05-09
北京纪事(2016年5期)2016-05-07
Coco薇(2015年11期)2015-11-09
Coco薇(2015年10期)2015-10-19
