
车辆混合型主动悬架试验研究
2018-03-14 03:43卜祥风谢友浩
制造业自动化 2018年2期
卜祥风,谢友浩
(1.滁州学院,滁州 239000;2.安徽猎豹汽车有限公司,滁州 239000)
0 引言
悬架是车辆底盘的重要结构和组成部分,起到缓冲路面冲击消耗振动能量的作用。传统被动悬架由于其固有特性,无法协调车辆行驶平顺性和操纵稳定性的矛盾。主动悬架能够解决被动悬架存在的问题,并且控制响应快,但往往不具有失效稳定性,当主动悬架失效时,车辆减振效果大大降低。半主动悬架通过改变悬架的弹簧刚度或阻尼系数来调节振动,响应速度较慢,具有一定的失效稳定性。本文提出的混合型主动悬架,在被动悬架的车轮环节加装电磁反力作动器形成。当电磁反力作动器工作时输出主动控制力,当电磁反力作动器不工作时,相当于一个被动吸振器,所有具有较好的失效稳定性。
1 悬架模型
1.1 混合型主动悬架力学模型
1/4车辆混合型主动悬架模型如图1所示,m为作动器振动块质量,m1为非簧载质量,m2为簧载质量,k1为轮胎刚度,k2为悬架刚度,c为作动器阻尼,c2为悬架阻尼,u是作动器电磁力,q、x1、x2、x3分别为路面、非簧载质量、簧载质量、作动器振动块位移。
电磁力u作用下,振动块m受迫振动,从而作动器整体对外输出一个反力Ft,Ft作为主动力作用在非簧载质量上。当电磁作动器不工作的时候,作动器相当于一个被动吸振器。此型悬架兼有主动悬架和被动悬架的特征,所以称为混合型主动悬架。

图1 车辆1/4混合型主动悬架模型
混合型悬架运动微分方程为:
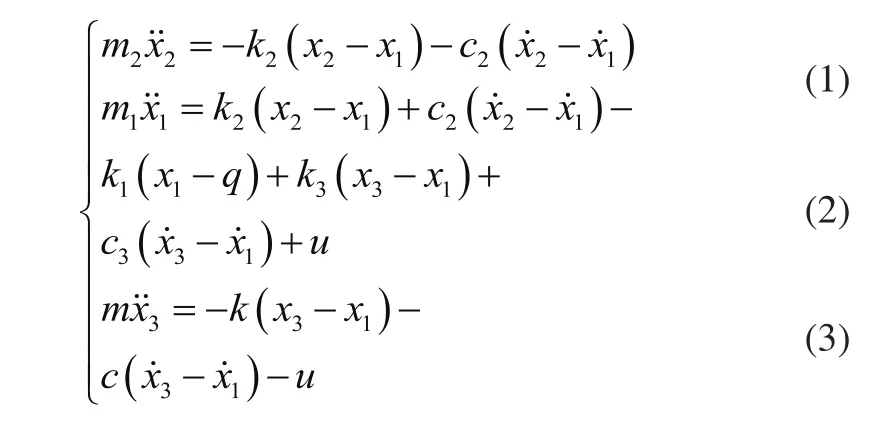
1.2 混合型主动悬架试验物理模型
图2所示为混合型主动悬架的试验物理模型,包括加载箱、导柱、大梁、簧载质量配重盘、减振器套件、非簧载质量配重盘、激振头。悬架主要参数:
m1=30kg,m2=275kg,k1=90kN/m,k2=159kN/m,c2=1.1kN.s/m。作动器主要参数:m=3.4kg,k=16kN/m,c=70N.s/m,电磁力常数µ=53.5N/A。其中减振器套件取自实车,以尽可能贴近实车模型。

图2 混合型主动悬架试验物理模型
2 试验系统
混合型主动悬架的试验系统组成如图3所示,试验系统主要包括四大部分,第一部分是激振头和悬架物理元件,激振源是INSTRON公司的8800数控液压伺服激振系统,能够编程实现模拟路面的振动。第二部分是混合型主动悬架的控制系统,包括信号采集、处理单元、单片机控制单元和驱动执行单元。这里采用了内环PID控制和外环鲁棒控制的双反馈闭环控制策略,控制原理如图4所示。第三部分是数据采集系统,使用了LMS数据采集仪,两个加速度传感器,LMS电脑自动记录传感器的加速度-时间曲线。
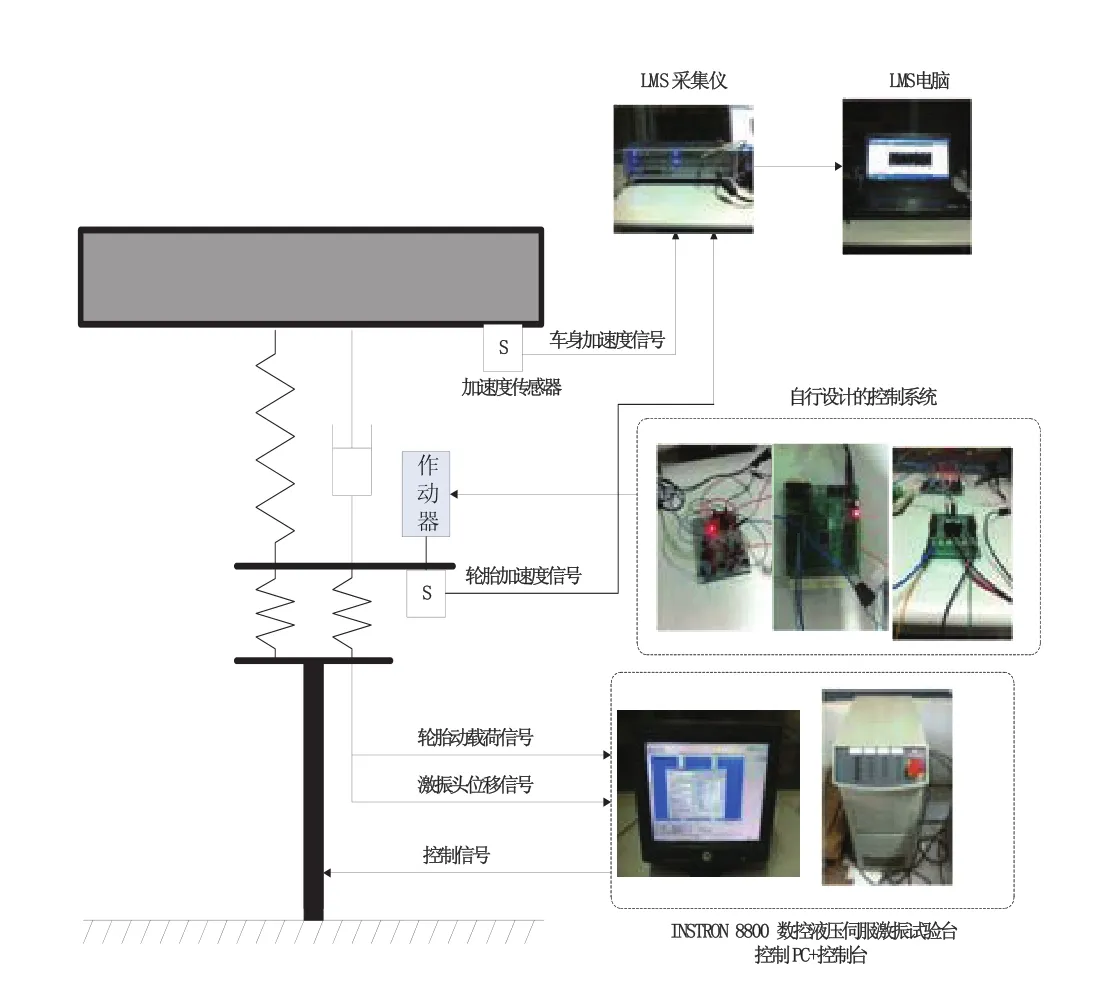
图3 试验系统图

图4 双反馈控制原理
试验原理为:加速度传感器采集到加速度信号,一方面由数据采集仪采集记录,另一方面信号经放大、AD转换变成单片机能够识别的数字信号;同样力传感器采集作动器的对外作动力信号也传送给单片机控制单元,单片机调用控制算法计算出实时的控制力,通过驱动电路驱动作动器输出电磁力,从而控制悬架系统的振动。
3 试验结果分析
3.1 正弦激励
采用正弦波输入模拟路面的确定性输入,正弦波频率为5Hz,振幅为10mm。
图5给出了悬架处在主动控制、被动吸振和被动三种情况下的车身振动加速度、轮胎振动加速度的对比图,表1列出了悬架在上述三种情况下的峰峰值。
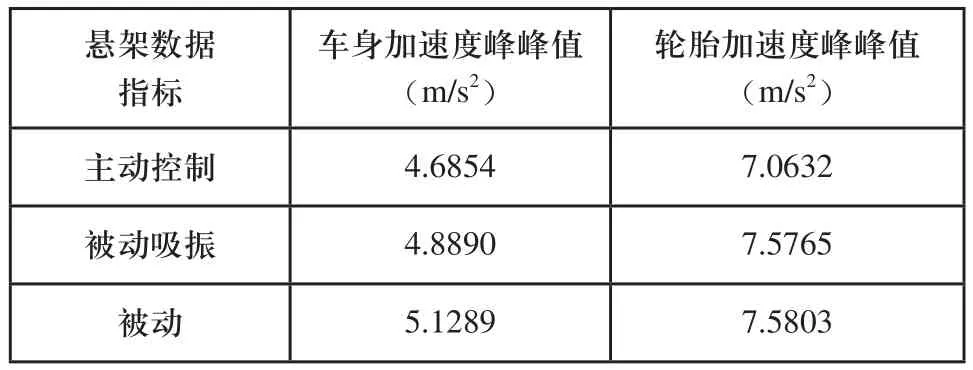
表1 正弦激励车身/轮胎加速度峰峰值
由图5结合表1的数据可以看出,主动控制时车身振动加速度峰峰值为4.6854m/s2、被动吸振时为4.8890m/s2,被动时为5.1289m/s2。主动控制下的车身振动加速度比被动吸振降低4.16%,比被动时降低8.65%;主动控制下轮胎振动加速度比被动吸振时降低6.77%,比被动时降低6.8%。

图5 2Hz正弦激励车身/轮胎加速度对比
3.2 随机路面激励
编程使激振头模拟B级路面下,车速30km/h时的路面输入,得到悬架在主动控制、被动吸振和被动时的车身振动加速度、轮胎振动加速度对比,如图6、图7所示。
表2给出了车身振动加速度和轮胎振动加速度的均方根值,可以看出悬架在被动吸振状态下比被动时,无论是车身振动加速度还是轮胎振动加速度,都改善的不明显。而悬架在主动控制时,相对于在被动时,车身加速度降低7.92%,轮胎加速度降低10.18%,显示了较好得减振效果。
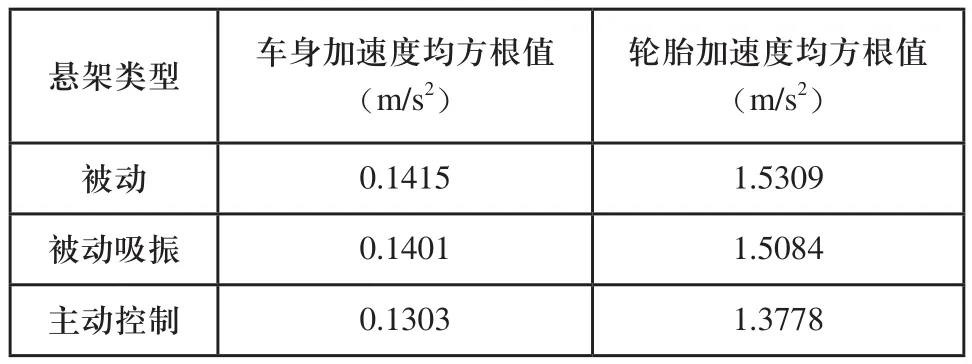
表2 车身/轮胎加速度均方根值
4 结论
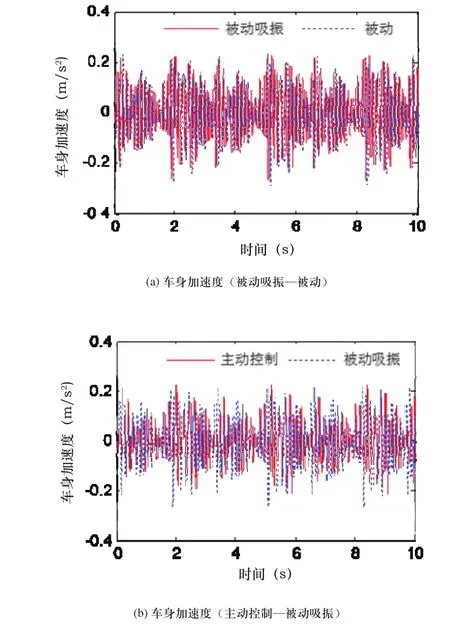
图6 车身加速度对比
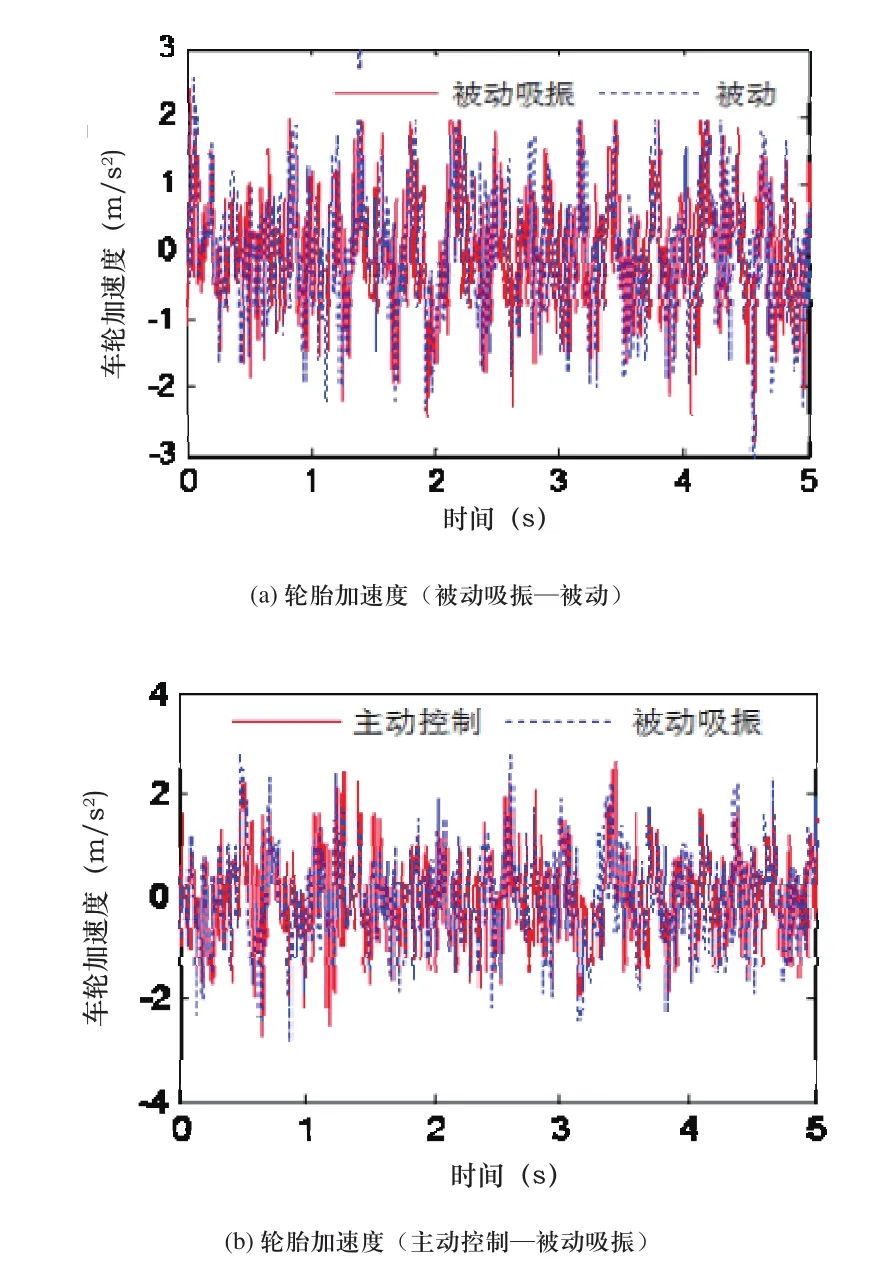
图7 轮胎加速度对比
通过上述正弦激励和随机路面激励试验可知,将电磁反力作动器安装在被动悬架车轮环节形成的混合型主动悬架能够起到控制减振的效果。为验证混合型主动悬架减振效果设计的试验模型准确可行,所设计的混合型主动悬架控制系统有效可行。
[1]臧杰,阎岩.汽车构造(下册)[M].北京:机械工业出版社,2015.
[2]聂佳梅,张孝良,胡贝,陈龙.车辆被动悬架技术发展新方向[J].车辆与动力技术,2012,(02):59-64.
[3]王国丽,顾亮,孙逢春.车辆主动悬架技术的现状和发展趋势[J].兵工学报,2000,(S1):80-83.
[4]郭国盛.汽车半主动悬架关键技术的发展现状和展望[J].企业技术开发,2013,(09):81-82,97.
[5]陈昆山,靳慧鲁.混合型主动悬架电磁反力作动器的匹配研究[J].噪声与振动控制,2010,(05):1-5.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
天津外国语大学学报(2021年1期)2021-03-29
VOGUE服饰与美容(2020年5期)2020-09-03
制造业自动化(2019年9期)2019-09-27
趣味(语文)(2019年5期)2019-09-02
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
北京汽车(2016年6期)2016-10-13
汽车实用技术(2015年8期)2015-12-26
浙江大学学报(工学版)(2015年8期)2015-03-01
