
737NG飞机自动驾驶作动筒作动原理及典型故障分析
2018-03-13 03:50:41由馥铭
现代制造技术与装备 2018年1期
由馥铭
(山东航空股份有限公司 青岛分公司,青岛 266108)
自动驾驶作动筒作用是将来自于FCC(飞行控制计算机)的电信号转化为液压控制的机械输出。作动筒的输出变成副翼和升降舵PCU(动力控制组件)的输入,然后驱动副翼和升降舵的运动。飞机上总共有四个自动驾驶作动筒,它们是完全相同的。两个用于控制副翼,两个用于控制升降舵。自动驾驶作动筒原理如图1所示。
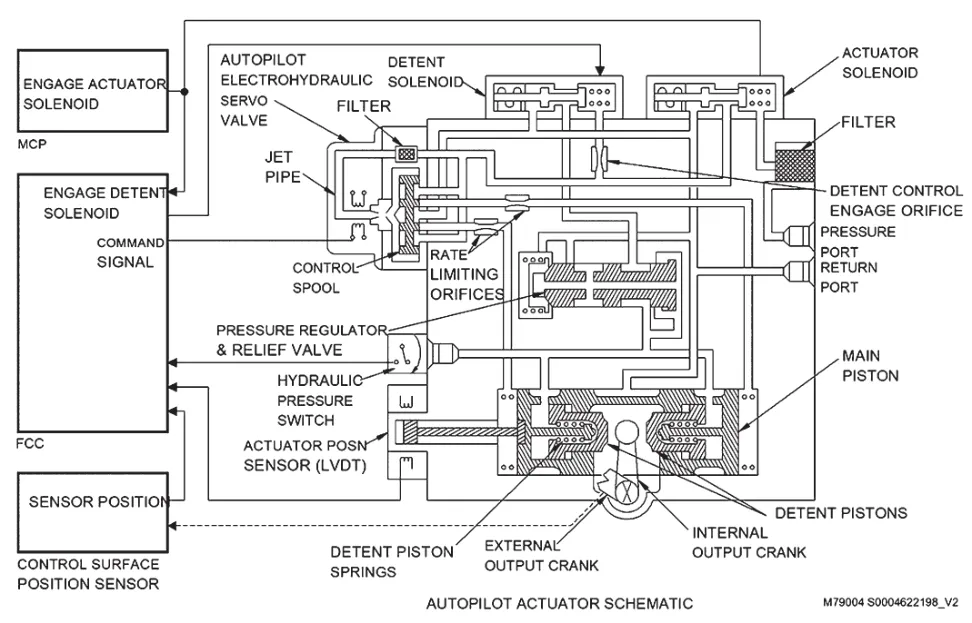
图1 自动驾驶作动筒原理
每个作动筒上有四个航线可更换件(LRU),它们分别是:Actuator solenoid valve作动筒电磁活门;Detent solenoid valve止动电磁活门;Electrohydraulic servo valve电子液压私服活门;Hydraulic pressure switch液压压力电门。
1 自动驾驶作动筒工作原理
在衔接自动驾驶之前,作动筒电磁活门并没有被激励,活门处于关闭状态,液压油无法到达作动筒内部。没有液压压力,止动活塞在弹簧作用下与内部输出曲柄处于分离状态,这样输出曲柄就不受自动驾驶作动筒的影响,可以随着舵面任意移动。
衔接自动驾驶是通过按压方式控制面板(MCP)上的衔接电门完成的。当按压衔接电门后,一个电信号从MCP送到作动筒电磁活门,活门被激励,活门内弹簧被压缩,活门打开,液压油此时可以通过作动筒电磁活门流入作动筒内部。液压油作用到作动筒电子液压伺服活门和止动电磁活门,此时止动电磁活门并没有被激励,弹簧加载在关闭位置。液压油从作动筒电磁活门流到止动电磁活门要经过一个限流器,这个限流器主要有两个作用,一是限制流到压力调节器的最大液压流量,防止超压;二是延时作用,在这个延时的时间内自动驾驶作动筒会完成同步。
控制舵面位置传感器(副翼或者升降舵)发送舵面位置信号给FCC,然后FCC送控制信号给作动筒电子液压伺服活门,作动筒电子液压伺服活门收到信号后,会移动主活塞到一个与内部输出曲柄相一致的位置,此即为同步过程。
在主活塞与内部输出曲柄同步后,FCC给出一个止动电磁活门的衔接信号,止动电磁活门被激励打开,此时止动活塞就有了液压压力,止动活塞移动到与内部输出曲柄相连位置,此时止动活塞与内部输出曲柄联动。压力调节和释压活门保持液压压力在一个安全限制范围内,在止动活塞与内部输出曲柄相连接的同时,液压压力电门也收到一个液压压力信号,液压压力电门在液压压力作用下闭合,然后送给FCC一个闭合信号,FCC收到这个闭合信号后才会保持衔接状态,否则自动驾驶会脱开。此时自动驾驶作动筒处于就绪状态。自动驾驶状态下,FCC给出控制信号,送到电子液压伺服活门,控制作动筒主活塞运动,带动止动活塞、内部输出曲柄、外部输出曲柄一起运动,带动舵面一起运动。作动筒位置传感器和舵面位置传感器会将位置信号反馈给FCC,用于位置监控。
2 典型案例分析
某日山航某架737NG飞机机组反应空中A通道自动驾驶无法接通,B通道正常。航后自检数字飞行控制系统(DFCS),当前状态正常,故障历史有代码22-11127和代码22-11123,分别指向升降舵自动驾驶作动筒压力电门和升降舵自动驾驶作动筒止动电磁活门。通过故障历史执行相关的LRU TEST,测试无法通过,故障现象稳定。地面打压衔接A通道自动驾驶可以短暂衔接,过几秒钟后自动脱开。排故参考故障隔离手册(FIM)FIM22-13 task806:首先,左右互串FCC,故障依旧,且未转移;其次,依据FIM测量了压力电门,其供电电压正常,依据FIM手册更换了A通道升降舵自动驾驶作动筒上的压力电门,测试故障依旧。说明故障不是压力电门导致的;最后,依据FIM手册,测量电插头D1861中21和22号钉之间的电阻,查看线路图可知,测量的是止动电磁活门线圈的电阻,阻值在100Ω左右,超出手册要求的60~85Ω,依据FIM要求更换了A通道升降舵自动驾驶作动筒后故障排除。
这是一起典型的自动驾驶作动筒原因导致自动驾驶无法衔接的故障,根据故障历史记录液压压力电门和止动电磁活门信息,人们基本可以判定FCC没有收到压力电门感受到压力的信号。如果止动电磁活门没有打开,液压油无法流到止动活塞,液压压力电门跟止动活塞联通,同样无法获得液压压力,这两个件故障都可能导致压力电门无法感受到压力信号闭合。最终测量发现,止动电磁活门电磁线圈阻值超标导致上述故障出现。那么为什么地面A通道自动驾驶刚开始可以衔接,但是几秒钟后会断开呢?MCP按压自动驾驶衔接电门后,作动筒电磁活门打开,液压油流到止动电磁活门有一个延时、同步过程,延时结束后,止动电磁活门无法打开,液压压力电门没有感受到压力信号,此时自动驾驶就会脱开,前面延时、同步过程保持衔接状态。而如果是作动筒电磁活门故障,衔接自动驾驶后应该会立即脱开。另外,止动电磁活门是一个航线可更换件,如果判断止动电磁活门故障,人们可以先更换止动电磁活门,不要依据FIM首先更换自动驾驶作动筒,这样既能节省成本,也节省时间。如果依然不行,人们再考虑隔离作动筒。
3 结语
自动驾驶作动筒的故障,通常会导致自动驾驶无法接通,它只会影响一个通道,人们排故时需要注意。自动驾驶作动筒故障大多数都是上面四个LRU的故障导致的,人们要根据故障代码优先隔离四个LRU,一可以节约成本,二可以节省时间。遇到自动驾驶系统故障时,通常的方法就是DFCS系统自检,然后依据故障代码排故。有些故障是当前状态无法发现的,因为当前状态的自测试并不涉及舵面运动,有些故障无法发现。这时,人们需要根据故障历史的代码做相应的LRU TEST或者做完整的自动驾驶系统的测试才能发现相应故障。
猜你喜欢
现代制造技术与装备(2021年5期)2021-07-02 01:57:30
科学技术创新(2021年11期)2021-05-25 10:04:00
科技风(2021年35期)2021-01-05 19:38:39
弹箭与制导学报(2020年4期)2020-09-17 06:14:38
科技风(2020年13期)2020-05-03 13:44:08
液压与气动(2019年9期)2019-09-17 11:26:26
科技风(2017年21期)2017-05-30 21:23:34
电气开关(2016年3期)2016-12-29 08:38:06
中国新通信(2015年17期)2015-05-30 10:48:04
机床与液压(2015年4期)2015-05-10 07:49:58
