地基激光雷达提取单木冠层结构因子研究
2018-03-13 02:01张芳菲吕春东
农业机械学报 2018年2期
王 佳 张芳菲 高 赫 吕春东
(1.北京林业大学林学院, 北京 100083; 2.北京林业大学精准林业北京市重点实验室, 北京 100083)
0 引言
树木冠层结构对于森林经营管理、抚育更新以及森林物种多样性等方面均具有十分重要的意义。精确获取冠层结构因子,对于提高立木材积和生物量回归模型的精度也有很大的帮助。目前对于单木冠层因子的提取主要采用直接测量和遥感反演两种方式[1]。在传统森林计测中,由于测树工具和观测技术的限制,冠层结构因子的测量往往依赖对伐倒木进行解析,耗费大量人力物力,同时该方法也会对树木造成不可逆转的损害。而在没有条件进行伐倒工作的场合,则只能依赖目测和估测,通过利用测量树高、胸径和冠幅等容易观测的因子,结合经验模型进行推算的方法。
随着冠层结构参数的研究和测量仪器的发展,许多仪器被研制出或被应用于冠层结构参数的测量中。在植被结构定量化研究中,激光雷达技术有非常重要的研究价值[2-4]。目前利用地基激光雷达可以直接测量或估计如树高、冠层高度、冠径、立木基部面积、地上生物量、冠层覆盖率、林木密度、蓄积量和垂直结构等[5-10]。熊妮娜等[11]使用几何体模拟的方法,将树冠简化为多个几何体组合的形式,计算组合体每部分体积,经过累加后得到树冠体积。徐伟恒等[12]认为,树冠不能用规则几何体模拟,提出了使用不规则几何体模拟并计算树冠体积的方法。王佳等[13]提出采用绿视率的方法计算树木的三维绿量,即树冠体积的方法,文献[14-16]等提出树冠内部存在较大空隙,用几何体模拟树冠忽略了空隙对体积带来的影响,通过体元数量计算树冠体积。文献[17-18]提出基于改进Delaunay算法的树冠三维重构方法。谢鸿宇等[1]基于点云分层所构多边形,求算树冠体积和表面积,杨全月等[19]提出基于计算几何学的寻找凸包算法,自动提取树冠的表面积、投影面积以及体积等测树因子。JUPP等[20]利用EVI方法对冠层孔隙率进行计算,将叶片与树冠其他部分区分开,并进行冠层模型拟合,以此求解叶面积指数。LEGENER等[21]根据Beer-Lambert定律,模拟光线穿透冠层时发生的吸收过程,通过非线性回归方法计算冠层孔隙率。GUANG等[22]将冠层进行几何投影估测叶面积指数,采用“点云分层”方法定量化描述冠层三维结构和叶面积指数。TAKEDA等[23]利用地基激光雷达测量冠层孔隙率,并基于冠层孔隙率计算植被面积指数(PAI)和植被密度指数(PAD)。
本文在上述研究基础上,采用体元法研究提取树冠体积和表面积,并与不规则投影法进行对比分析。同时对于反映树冠枝叶分布最重要的因子——冠层孔隙度,则通过模拟鱼眼相机测定孔隙度原理,运用Lambert 方位角等面积投影法和球极平面投影法计算冠层孔隙度,并将2种方法的结果进行对比。
1 点云数据获取与处理
为提取单木的冠层结构因子,本文使用FARO Photon 120型地基激光雷达(图1)进行扫描,获取点云数据,扫描仪的主要参数如表1所示。

图1 FARO Photon 120型扫描仪Fig.1 Picture of FARO Photon 120 scanner

参数数值最大测量距离/m120最小测量距离/m0.6分辨率/mm0.1数据获取率/(pixel·s-1)≤50800025m内误差/mm≤2水平视野范围/(°)0~360垂直视野范围/(°)0~320
选取北京林业大学校园内6株单木对其进行精确扫描,选取的单木遮挡部分少,冠层特征明显,具有代表性。在进行地基激光雷达扫描工作之前,首先需要进行测站的设计。为了能完整识别出单木,需要保证每株单木至少能被3个方位的测站扫描到,3个测站的间隔角度最好在120°左右。对于存在遮挡的情况,可以适当增加测站数,同时也要避免盲目设置测站,加大工作量,也造成数据冗余,为今后的点云数据处理工作带来不便。经过对目标单木以及周边环境的实际考察后,进行合理的测站布置。站点设置方式如图2所示。
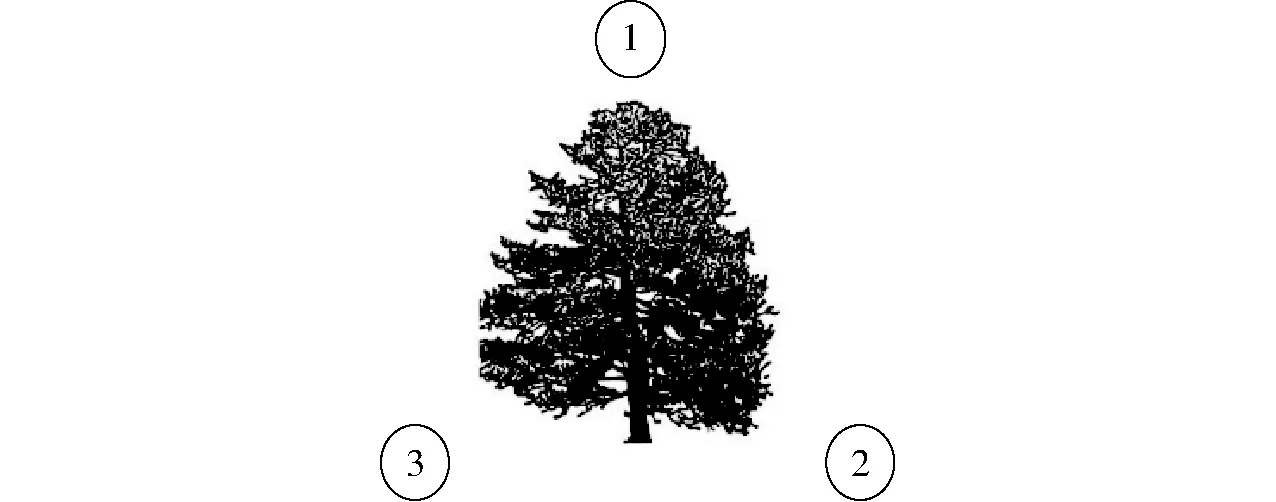
图2 单木激光扫描测站设置示意图Fig.2 Schematic diagram of individual tree laser scanning station
本文内业数据处理软件为FARO SCENE,打开软件,直接把测站数据拖曳到软件中,第1次打开软件时,扫描数据的扫描点数值默认为62,这个数值是根据计算机的内存自动显示的,本文所涉及的点云提取使用的计算机内存为2 GB,经过在不同内存的计算机中进行点云数据提取实验,结果显示默认的扫描点的数值均能满足精度要求。
将本文示例的立木扫描数据均加载到统一的工作空间窗口下,这时可以看到图3所示的窗口的左边显示为绿色的3个公共参考球,分别为2、3、6号球,这就表示3站数据已经很好的拟合了,同时也看到了第2站的数据中多了一个7号球,这是由于扫描仪在扫描过程中会默认与参考球形状相似的物体也是参考球,它就会自动标记成一个球,这种情况只要在每一站的数据下直接把多余的球删除即可,此过程不会对提取结果产生影响。
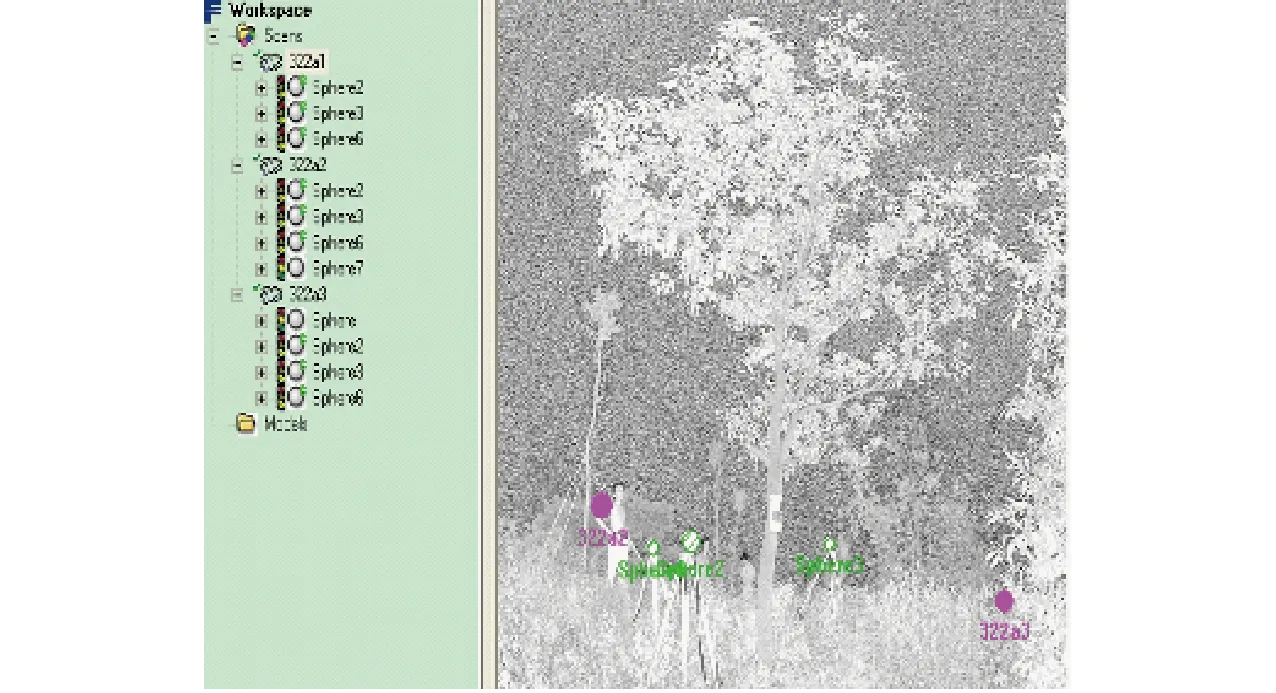
图3 3站数据加载后的公共球自动拟合显示Fig.3 Display of automatic simulation of public balls when loading data
拼接好的点云数据中还包含除扫描目标外的大量多余数据,需要对单木进行提取,其本质工作就是删除多余的点云数据。提取单木数据的过程中主要使用上文中提到的多边形选择工具。在三维视图中,将视角调整为俯视或仰视,便于观察单木冠幅覆盖区域。用多边形选择工具框选出该区域,并选择删除外部区域,可以迅速删除区域外的点。再将视图调整为合适视角,对区域内残留的噪点进行删除。在提取冠层结构因子的过程中,只需要用到冠层的点云数据。因此,对提取出的单木点云还需进行处理,将其树干以及树干上的小枝部分删去,只保留冠层的点云数据。保留冠层的点云数据如图4所示。将处理好的点云数据导出,存储为XYZ格式文件,以便进行下一步冠层结构提取。
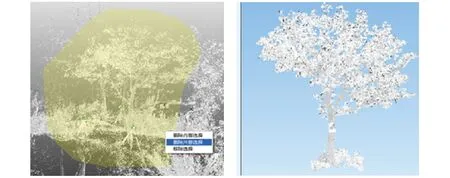
图4 提取出的冠层点云数据Fig.4 Extracted canopy point cloud data
2 冠层结构因子提取方法
2.1 树冠体积提取算法
树冠体积的提取一直以来都是冠层结构因子研究当中的难点[24],在地基激光雷达的研究领域,树冠体积的计算也是一个热点问题。本文采用2种方法对树冠体积进行研究。一种是利用不规则面投影计算树冠体积;另一种是点云体元化算法,将点云数据体元化,剔除空隙的无效部分后统计体元个数来计算树冠体积。
2.1.1不规则面投影法
将获取的树干点云数据按照0.2 m的间隔,由下至上进行分层,对于获得的每一层点云数据,将其按照垂直投影的方法投影到平面上。经过投影获得的是失去了垂直坐标信息的二维散点数据,需要生成一个闭合凸包来模拟树冠的投影面。对于凸包的生成算法,计算机图形学中已有大量的研究,此处用一个ArcGIS中的简单工具生成散点图的凸包,为计算树冠的体积与表面积做准备。
将分层后的点云投影到平面上,可以使用ArcGIS软件导入数据的功能,直接将点云数据中的坐标信息导入,使其以二维散点的形式显示在平面上。将分层后的点云数据进行二维平面显示,即忽略了其竖直方向上的信息,相当于对每一层树冠点云进行了平面投影,生成的凸包即可视作每一层树冠在平面上的投影面,如图5所示。
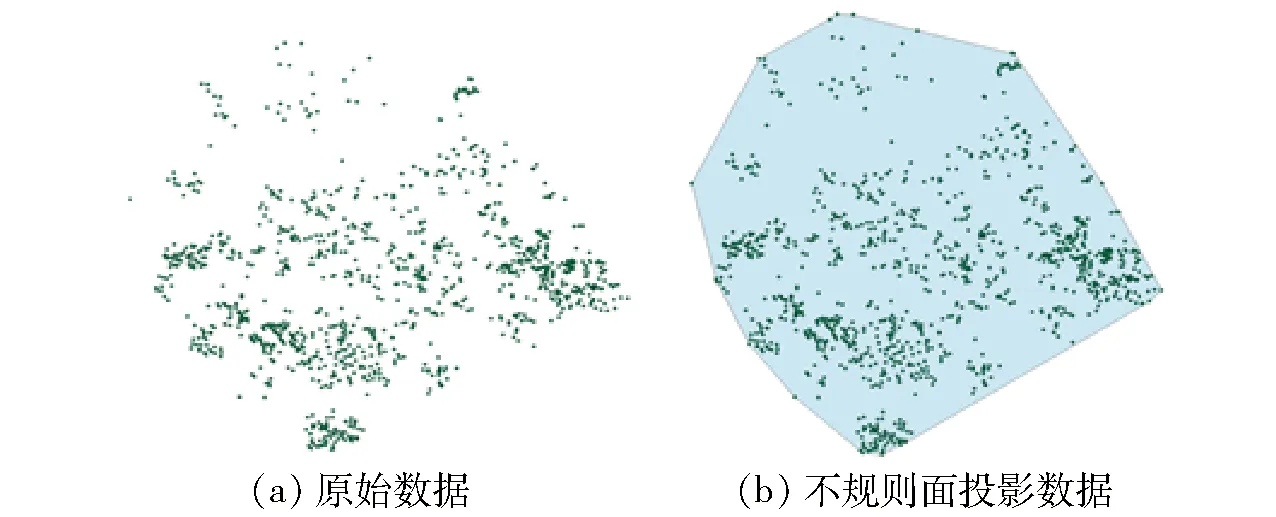
图5 冠层点云不规则平面投影Fig.5 Irregular surface projections of canopy point cloud
将二维散点数据导出为shp文件,将其作为待处理要素。使用ArcGIS软件中的Minimum Bounding Geometry工具进行凸包生成。
使用该工具时,点云进行二维平面显示的散点图即是输入要素,通过对参数的理解结合对于生成凸包的需求,在此处应当选择封闭某输入要素的最小凸面作为生成类型,并将输入的所有要素视为一个组,并在输出的要素类中添加几何属性。
生成的凸包是面要素,可以在其属性中直接查看该面的周长与面积。将生成的每个凸包的面积乘以0.2,即可得到该分层的体积。需要注意的是按照0.2 m进行分层的过程中,最后顶端剩余部分不到0.2 m,需要乘以其真实高度计算其体积。最后将各个分层的体积累加即可得到树冠体积,如图6所示。
(1)
式中V——树冠体积n——树冠分段数
si——第i段的投影面面积
hi——第i段高度,在本文中,除去顶端剩余部分外均为0.2 m
s0——最后顶端剩余部分的投影面面积
h0——顶端剩余的高度
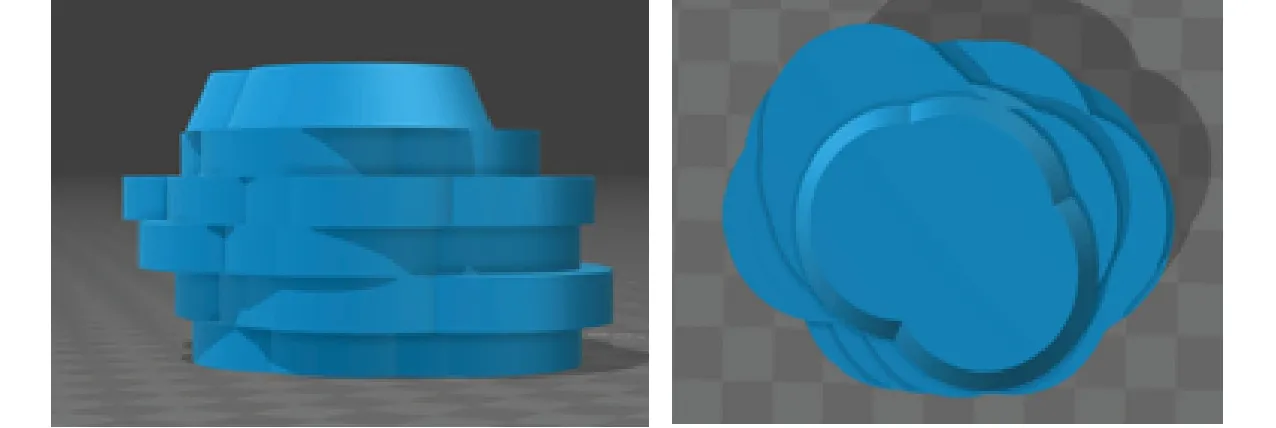
图6 不规则投影面法模拟冠层示意图Fig.6 Simulation of canopy with irregular projection surface method
2.1.2点云体元化算法
体元在概念上类似二维图像中的最小单位像素,可以理解为二维像素化在三维空间的推广,体元是在三维空间中的最小单位。体元化即在空间中用一个个小的体元来模拟真实的物体。由于体元的大小是人为设定的,因此每个体元的体积是确定的,统计冠层的三维点云数据进行体元化后包含体元的个数即是树冠体积,体元法模拟冠层示意图如图7所示。

图7 体元法模拟冠层示意图Fig.7 Simulation of canopy with voxelization method
本文点云数据体元化和体积计算的算法步骤如下:
(1)读取点云数据。将导出的XYZ格式的树冠点云数据转换为TXT格式的文本文件,其坐标信息可以得到完整保留。利用程序读取TXT格式的文本文件,计算其坐标信息。分别计算X、Y、Z方向上点云坐标最大值与最小值的差,根据这3个差值来确定建立体元的范围,使其能完整包含所有点云。
(2)设定体元建立条件和体元尺寸。体元建立条件是指当某处的点云满足条件时建立体元,对于冠层中存在的空隙,表现为没有点云出现或者点云数过少。通过设定一个阈值作为是否建立体元的判断条件,当在设置的体元尺寸范围内点云数量大于或等于该阈值时建立体元。
(3)统计体元个数,由于体元的体积为边长的立方,乘以其个数即可得到树冠体积,即
V=Na3
(2)
式中a——体元的边长,此处为0.2 m
N——树冠体元化后体元个数
2.2 树冠表面积提取算法
2.2.1不规则面投影法
树冠表面积的求解方法与树冠体积提取算法类似,其计算步骤与提取树冠体积的步骤基本一致,不同之处在于需要得到不规则投影面的周长,乘以分段高度计算其侧面积,剩余顶端部分乘以其真实高度,并加上一个投影面的面积作为顶端计算其表面积。其计算公式为
(3)
式中Ssurface——树冠表面积
li——第i分段不规则投影面的周长
l0——剩余顶端的投影面周长
2.2.2点云体元化算法
冠层点云体元法平面投影示意图如图8所示,点云数据体元化的表面积计算步骤如下:
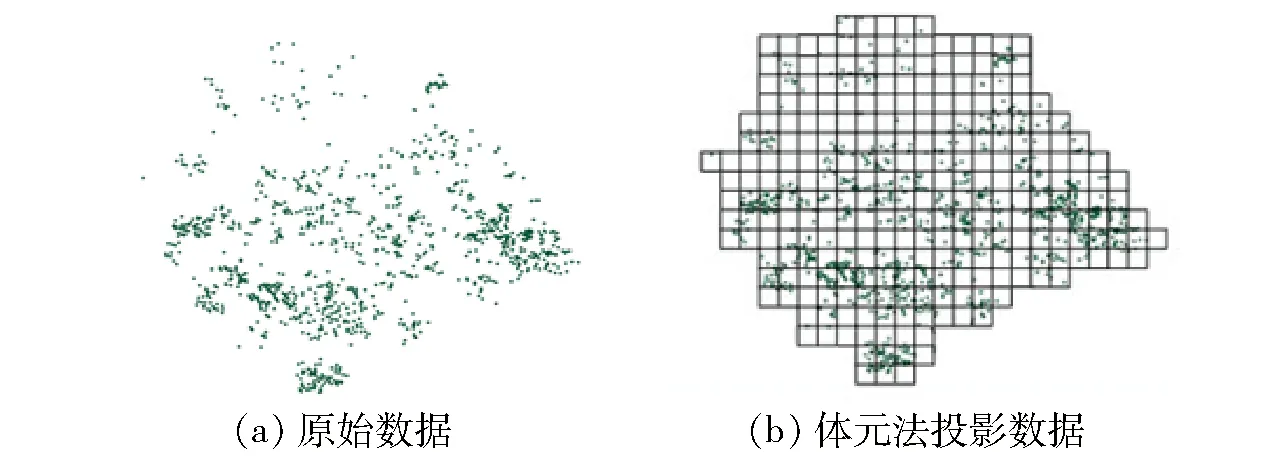
图8 冠层点云体元法平面投影Fig.8 Voxel projection of canopy point cloud
(1)建立体元的步骤与体元化计算体积步骤相同。
(2)计算X、Y、Z方向上点云坐标最大值与最小值的差,根据这3个差值来确定建立体元的范围,使其能完整包含所有点云。设定体元的边长为a,则在垂直方向可以分为n=Z/a层,将i层体元投影到水平面,对所有正方形的四边建立拓扑关系,搜索每个正方形中的独立边(即不与其他正方形共用的边),则第i层独立边的个数为Ji。
(3)统计所有层的独立边个数,则树冠表面积计算公式为
(4)
2.3 冠层孔隙度提取算法
利用冠层点云数据计算孔隙率的算法基本原理,是将空间中分散的点云数据压缩到半球面上,为了描述天顶角相关信息参数,加入地理中的纬度线,将半球进行划分。点云数据模拟的半球图像被划分成若干个同心圆环,孔隙率正比于每个同心圆环中空白部分的面积。本文在计算孔隙率时,选择直接计算圆环面积,统计该同心圆环中点云的像素个数后,通过计算点云所占面积的方法间接获取冠层孔隙率,其计算公式为
(5)
式中θ——入射太阳光线天顶角
M——叶片的像素数
m——像元尺寸Sr——圆环面积
利用三维点云数据计算孔隙率时,首先要将点云数据模拟成半球图像。
首先,将点云数据的坐标转换为球面坐标。根据笛卡尔坐标与球面坐标的关系,有
(6)
将r设定为一个合理的统一值,即可将点云压缩到半径为r的半球面上。之后再将球面坐标转换为笛卡尔坐标

(7)
为了记录方便,将点云数据的原始坐标记为X、Y、Z,转换后的坐标记录为X1、Y1、Z1。
然后,用不同投影方法将半球图像投影到平面上。这里采用两种投影方法:球极平面投影和Lambert方位角等面积投影,2种方法原理如图9所示。根据两种投影的原理可以分别计算其投影后的坐标。
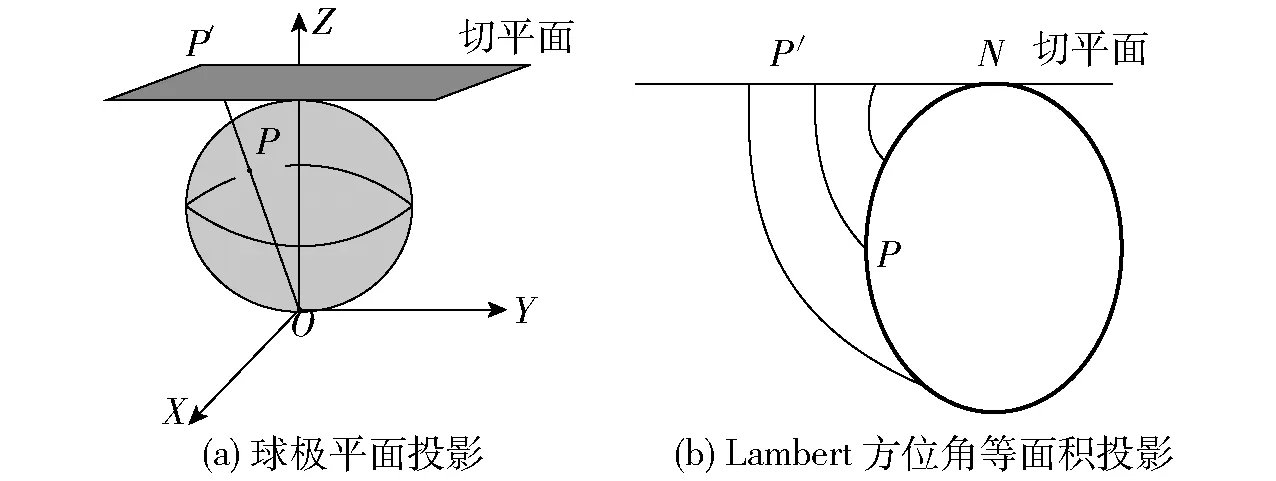
图9 两种投影方法原理Fig.9 Principle of two kinds of projection
将球极平面投影的坐标记为X2、Y2,Lambert方位角等面积投影的坐标记为X3、Y3,则有
(8)
(9)
至此坐标的转换过程结束。将转换后的坐标在ArcGIS软件中打开,可以得到转换坐标后的点云分布情况,如图10所示。

图10 投影结果Fig.10 Results of projection
最后在图10中添加一个坐标为(0,0)的点作为原点,以原点为中心按照天顶角10°为间隔划分同心圆环,即将图像划分为9份,得到9个同心圆环。
获取位于每个环中的点。将每个环中的点提取出来后即可对其进行统计。图11以不同颜色的点表示了每个环内点的分布情况。

图11 点分布情况Fig.11 Distribution of points in different rings
对每个环内的点分别进行栅格化,需要注意对于同一投影下,每个环内的点转换为栅格的过程中所设置的栅格大小要相同。转换完成后统计每个环内的像素数,根据式(5)即可求出每个环的孔隙率。
2.4 精度评价

e=P1-P2
(10)
(11)
(12)
式中P1——第1种方法孔隙率
n——树木的个数
P2——第2种方法孔隙率

δi——第i个相对误差
3 结果与分析
3.1 树冠体积提取结果分析
本文中设置的体元边长为0.2 m,主要从计算精度和计算效率两方面考虑,体元尺寸越小对目标的模拟越细腻,获得的结果越接近真实值,但相应的需要建立体元的个数和进行判断的次数会显著增加,限于计算机处理能力选择以0.2 m作为体元尺寸,同时考虑到0.2 m的尺度小于或接近冠层中明显空隙的尺度,利用边长0.2 m的体元模拟冠层可以较好的剔除冠层中无效的空隙部分。
将利用点云体元化算法计算得到的树冠体积与不规则投影面法得到的树冠体积进行对比,并计算其绝对误差和相对误差,如表2所示。通过对6株立木的数据进行分析可知,树冠体积的绝对误差范围为8.26~46.75 m3,相对误差为5.32%~12.43%,平均相对误差为9.29%;本研究结果与其他研究得出结果类似,体积的计算结果均是体元法小于不规则投影面法,因为体元法可以剔除内部空白区域,总体的相对误差也与其他研究一致。
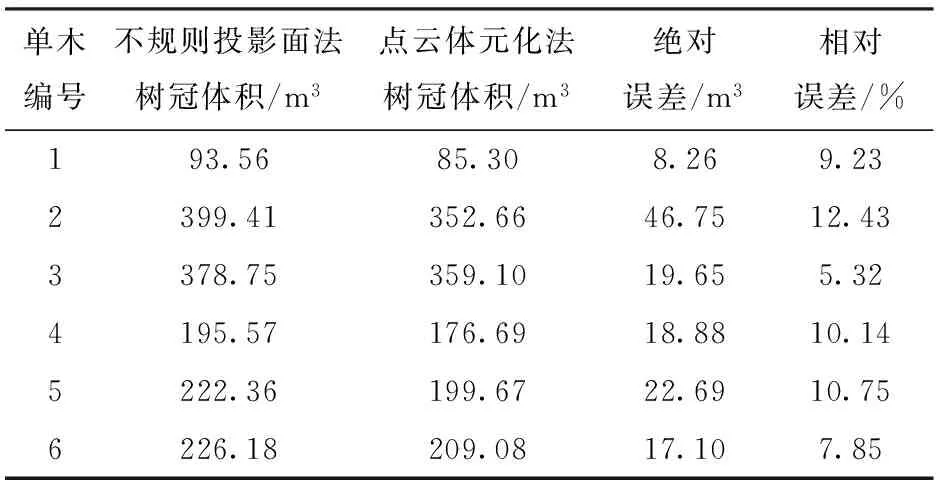
表2 2种方法的树冠体积提取结果Tab.2 Results of canopy volume extraction with two methods
3.2 树冠表面积提取结果分析
将利用点云体元化算法计算得到的树冠表面积与不规则投影面法得到的树冠表面积进行对比,并计算其绝对误差和相对误差,如表3所示。通过对6株立木的数据进行分析可知,树冠表面积的绝对误差范围为7.85~38.85 m2,相对误差为1.4%~5.21%,平均相对误差为3.33%;两种方法相对误差差距不大,经过分析发现,由于选取目标树木为校园内的树木,所以人工干预比较多,树木表面比较均匀,所以2种算法计算结果十分接近。
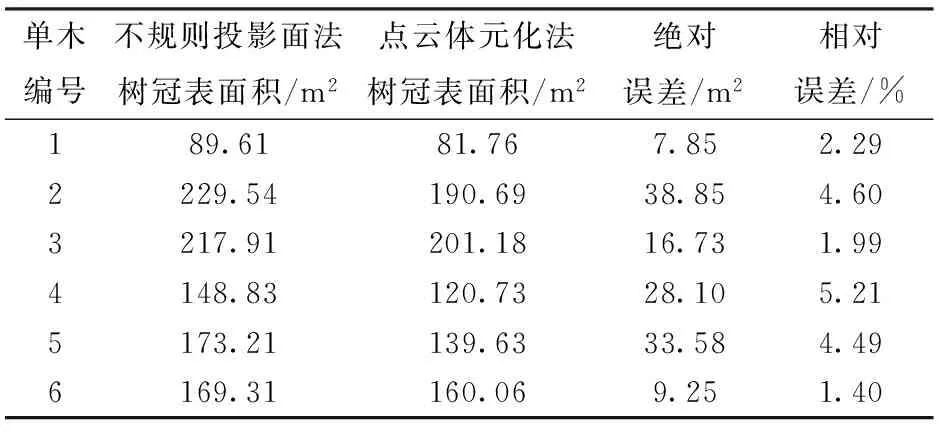
表3 2种方法树冠表面积提取结果Tab.3 Results of canopy surface area extraction with two methods
3.3 冠层孔隙度提取结果分析
表4给出了每株单木利用Lambert方位角等面积投影和球极平面投影方法在不同天顶角下孔隙率与平均孔隙率计算结果。

表4 2种投影方法冠层孔隙率的计算结果Tab.4 Calculation results of gap fraction using two projection methods
由表4结果可以看出,Lambert方位角等面积投影和球极平面投影2种方法,在天顶角较小的情况下冠层孔隙率都很大,因为树冠外围部分所占面积较大而有枝叶覆盖的部分很少,大部分是空隙部分,造成孔隙率大。随着天顶角逐渐增大,冠层孔隙率也逐渐降低,但值得注意的是在10°~20°范围时出现孔隙率不变或增大的情况,这种现象的出现推测为所占面积减小,而枝叶覆盖情况变化不大所导致。在80°~90°范围内是冠层孔隙率最小处,但2号与5号单木该处孔隙率明显大于其他单木,实际观测这两株单木冠层内部空隙较明显,该结果与表面积和体积计算结果也一致。2种方法计算的平均孔隙率误差为0.03,相差不大,特别是10°~60°范围内,2种方法误差在0.03以内,60°~90°范围时误差逐渐增大,说明对于树冠外围稀疏点投影是地基激光雷达计算孔隙率的关键。
4 结论
(1)利用地基激光雷达提取单木冠层结构因子是可行且有效的,与传统仪器和测量手段相比,地基激光雷达一台设备对单木进行一次扫描,获取的点云数据除了可以提取常规的测树因子,如树高、冠高、第一枝下高、胸径等,还可用于提取较为复杂的树冠体积、树冠表面积、冠层孔隙率等冠层结构因子,减轻了外业测量工作量,效率得到了明显提升。
(2)树冠体积和表面积无法直接进行量测,因此对两种不同方法提取出的结果进行对比。两种方法树冠体积计算的平均相对误差为9.29%,树冠表面积平均相对误差为3.33%,2种方法计算的冠层孔隙率的平均误差为0.03。
1 谢鸿宇,赵耀龙,杨木壮,等. 基于地面LiDAR的树冠体积和表面积测量方法研究[J]. 中南林业科技大学学报,2015,35(4):1-6,13.
XIE Hongyu, ZHAO Yaolong, YANG Muzhuang,et al.Measurement and calculation methods of volume and surface area of treecrown based on terrestrial 3D laser scanning system[J]. Journal of Central South University of Forestry & Technology,2015,35(4):1-6,13.(in Chinese)
2 BALDUZZI M A F, ZANDE D V D, STUCKENS J, et al. The properties of terrestrial laser system intensity for measuring leaf geometries: acase study with conference pear trees (Pyruscommunis)[J]. Sensors, 2011, 11(2):1657-1681.
3 李增元,刘清旺,庞勇. 激光雷达森林参数反演研究进展[J]. 遥感学报,2016,20(5):1138-1150.
LI Zengyuan, LIU Qingwang, PANG Yong. Review on forest parameters inversion using LiDAR[J]. Journal of Remote Sensing, 2016,20(5): 1138-1150.(in Chinese)
4 庞勇,李增元,陈尔学,等. 激光雷达技术及其在林业上的应用[J]. 林业科学,2005,41(3):129-136.
PANG Yong,LI Zengyuan,CHEN Erxue,et al. LiDAR remote sensing technology and its application in forestry[J]. Scientia Silvae Sinicae,2005,41(3):129-136.(in Chinese)
5 BIENERT A, SCHELLER S, KEANE E, et al. Tree detection and diameter estimations by analysis of forest terrestrial laser scanner point clouds [C]∥ISPRS Workshop on Laser Scanning, 2007: 50-55.
6 BROLLY G, KIRALY G. Algorithms for stem mapping by means of terrestrial laser scanning[J]. Acta Silvatica & Lignaria Hungarica, 2009, 5(2):119-130.
7 HILDEBRANDT R, IOST A. From points to numbers: a database-driven approach to convert terrestrial LiDAR point clouds to tree volumes[J]. European Journal of Forest Research, 2012, 131(6):1857-1867.
8 KIRALY G, BROLLY G. Volume calculations of single trees based on terrestrial laser scanning[C]∥The 10th International Conferenceon LiDAR Applications for Assessing Forest Ecosystem (Silvilaser2010),2010.
9 KIRALY G, BROLLY G. Tree height estimation methods for terrestrial laser scanning in a forest reserve[J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2007,36(Part 3): W52.
10 HOPKINSON C, CHASMER L, YOUNGPOW C, et al. Assessing forest metrics with a ground-based scanning LiDAR[J]. Canadian Journal of Forest Research, 2004, 34(3):573-583.
11 熊妮娜,王佳,罗旭,等. 一种基于三维激光扫描系统测量树冠体积方法的研究——以油松为例[J]. 北京林业大学学报,2007,29(增刊2):61-65.
XIONG Nina,WANG Jia,LUO Xu, et al.Measuring tree crown volume based on three dimension laser scanning and mapping system[J]. Journal of Beijing Forestry University,2007,29(Supp.2):61-65.(in Chinese)
12 徐伟恒,冯仲科,苏志芳,等.一种基于三维激光点云数据的单木树冠投影面积和树冠体积自动提取算法[J].光谱学与光谱分析,2014,34(2): 465-471.
XU Weiheng,FENG Zhongke,SU Zhifang,et al. An automatic extraction algorithm for individual tree crown projection area andvolume based on 3D point cloud data[J].Spectroscopy and Spectral Analysis,2014,34(2): 465-471.(in Chinese)
13 王佳,杨慧乔,冯仲科. 基于三维激光扫描的树木三维绿量测定[J/OL]. 农业机械学报,2013,44(8):229-233. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130839&flag=1.DOI:10.6041/j.issn.1000-1298.2013.08.039.
WANG Jia, YANG Huiqiao, FENG Zhongke. Tridimensional green biomass measurement for trees using 3D laserscanning[J/OL]. Transactions of the Chinese Society for Agricultural Machinery ,2013,44(8):229-233.(in Chinese)
14 韦雪花,王永国,郑君,等. 基于三维激光扫描点云的树冠体积计算方法[J/OL].农业机械学报,2013,44(7):235-240. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130741&flag=1.DOI:10.6041/j.issn.1000-1298.2013.07.041.
WEI Xuehua,WANG Yongguo,ZHENG Jun,et al.Tree crown volume calculation based on 3D laser scanning point clouds data[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(7): 235-240.(in Chinese)
15 樊仲谋,冯仲科,郑君,等.基于立方体格网法的树冠体积计算与预估模型建立[J/OL].农业机械学报,2015,46(3): 320-327.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150347&flag=1. DOI:10.6041/j.issn.1000-1298.2015.03.047.
FAN Zhongmou,FENG Zhongke,ZHENG Jun,et al. Tree crown volume calculation and prediction model establishment using cubic lattice method[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(3): 320-327.(in Chinese)
16 刘芳,冯仲科,杨立岩,等. 基于三维激光点云数据的树冠体积估算研究[J/OL]. 农业机械学报,2016,47(3):328-334.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160346&flag=1. DOI:10.6041/j.issn.1000-1298.2016.03.046.
LIU Fang, FENG Zhongke, YANG Liyan, et al. Estimation of tree crown volume based on 3D laser point clouds data[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):328-334.(in Chinese)
17 巩垠熙,何诚,冯仲科,等.基于改进Delaunay 算法的树冠三维重构单木因子提取[J/OL].农业机械学报,2013,44(2): 192-199.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130236&flag=1. DOI:10.6041/j.issn.1000-1298.2013.02.036.
GONG Yinxi, HE Cheng, FENG Zhongke, et al.Amended Delaunay algorithm for single tree factor extraction using 3-D crown modeling[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013, 44(2):192-199.(in Chinese)
18 GONG Yinxi, YAN Fei, FENG Zhongke, et al.Extraction of crown volume using triangulated irregular network algorithm based on LiDAR[J]. Journal of Infrared and Millimeter Waves, 2016,35(2):177-183, 189.
19 杨全月,陈志泊,孙国栋. 基于点云数据的测树因子自动提取方法[J/OL]. 农业机械学报,2017,48(8):179-185. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170820&flag=1. DOI:10.6041/j.issn.1000-1298.2017.08.020.
YANG Quanyue,CHEN Zhibo,SUN Guodong.Automatic extraction method of tree measurement factors based on point cloud data[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2017,48(8):179-185.(in Chinese)
20 JUPP D L B,CULVENOR D S,LOVELL J L,et al. Estimating forest LAI profiles and structural parameters using a ground based laser called Echidna[J]. Tree Physiol, 2009,29:171-181.
21 LEGENER N, FLECK S, SEIDELD,et al. Crown transparency assessment based on terrestrial LiDAR[C]∥Silvilaser Conference-10th International Conference on LiDAR Applications for Assessing Forest Ecosystems, Freiburg, Germany, 2010: 383-394.
22 GUANG Z, MOSKAL L M. Retrieving leaf area index (LAI) using remote sensing: theories, methods and sensors[J]. Sensors, 2009, 9(4):2719-2745.
23 TAKEDA T, OGUMA H, SANO T, et al. Estimating the plant area density of a Japanese larch (LarixkaempferiSarg.) plantation using a ground-based laser scanner[J].Agriculture and Forest Meteorology,2008,148(3):428-438.
24 郑治刚,李怀玉,廖雅萍. 树冠空间体积的计算方法[J]. 林业资源管理,1986(1):35-40.
ZHENG Zhigang, LI Huaiyu,LIAO Yaping. Calculation method of crown space volume[J]. Forest Resources Management,1986(1):35-40.(in Chinese)
猜你喜欢
农业工程学报(2022年14期)2022-10-19
作物杂志(2022年3期)2022-07-06
激光与红外(2022年5期)2022-06-09
中国农业信息(2022年1期)2022-05-25
农业机械学报(2021年11期)2021-12-07
现代职业教育·高职高专(2020年3期)2020-08-16
干旱地区农业研究(2019年6期)2019-02-25
——以“各种位置平面的投影特性”一课为例
汽车实用技术(2018年10期)2018-06-01
森林工程(2018年5期)2018-05-14
中南林业科技大学学报(2017年12期)2017-12-19