无人机载激光雷达人工林单木分割算法研究
2022-06-09 04:53:46于海洋冯思伟申洋洋
激光与红外 2022年5期
于海洋,冯思伟,申洋洋,刘 鹏
(1.河南理工大学 自然资源部矿山时空信息与生态修复重点实验室,河南 焦作 454003;2.河南理工大学测绘与国土信息工程学院,河南 焦作 454003)
1 引 言
森林可以调节气候,涵养水源,人工林作为森林的重要组成部分,在生态环境治理与保护方面发挥着极其重要的作用[1]。无人机载激光雷达技术(UAV-LiDAR)作为一种利用激光器发射激光脉冲并接收物体表面返回信号的主动遥感技术,在快速精准地获取林木三维结构、提取和反演森林参数等方面有着巨大优势[2-4]。无人机载激光雷达单木分割是从UAV-LiDAR点云数据中分割出单木点云或定位到单木位置。现有无人机载激光雷达单木分割算法分为两类,一类是基于栅格数据-冠层高度模型(Canopy Height Model,CHM)进行分割,另一类是直接基于归一化点云(Normalized Point Cloud,NPC)。全迎等[5]基于无人机载激光雷达点云数据,利用局部最大值滤波器探测单木树顶,并以探测树顶为标记,通过分水岭分割勾绘单木树冠,单木位置探测的精度达到0.445 m。陈日强等[6]使用标记控制分水岭算法检测与提取果树树冠,检测精度达到95.03 %,树冠轮廓提取准确率为86.39 %。基于点云的单木分割是在三维空间尺度上采用区域生长或聚类分割的算法分割出树冠[7]。Yan等[8]开发了一种基于均值漂移聚类的自动分层单木分割方法,平均正确率、完整率和总体精度分别为0.90、0.88和0.89。Jaskierniak等[9]开发了一种聚类方法分割单株树,在39个实地调查点中,正确分割树木占测量树木的85 %。
本研究采用基于CHM的分水岭分割、邻域增长和特征点决策树以及基于点云的聚类分割算法分割人工林单木。采用单木探测率P、准确率R和F得分作为评价指标,分析四种算法的分割精度,寻找最优分割算法和最佳参数。
2 研究区概况与数据获取
2.1 研究区概况
研究选取河南省焦作市市区(113°15′~113°16′E,35°10′~35°11′N)为实验样区,样区内植被以人工种植乔木为主,种类丰富,主要树种包括雪松(Cedrus deodara)、垂柳(Salix babylonica)、女贞(Ligustrum lucidum)、梧桐(Firmiana platanifolia)等。根据优势树种和林分密度差异在样区选取四块样地,图1为研究区位置、无人机飞行路线及样地分布情况。

图1 研究区位置Fig.1 Location of study area
2.2 数据获取
论文激光雷达数据采集系统为深圳飞马机器人科技公司生产的一体化航测无人机系统D-200 LiDAR版。LiDAR硬件系统集成了RIEGL mini VUX-1UAV激光雷达扫描仪、GNSS天线、高精度IMU定位定姿系统及高速存储控制单元。传感器波长905 nm,测量距离250 m。激光雷达数据采集时间为2019年7月15日,获取12个航带的数据,航线间距72 m,飞行高度120 m,飞行里程21.16 km,获取的平均点云密度为65 pts·m-2。
采用GNSS测量样地内每株单木位置信息,并以无人机同期采集的高分辨率影像作为研究的参考数据。其中样地一、二为人工阔叶林,优势树种为女贞;样地三、四为人工针叶林,优势树种为雪松。图2为四块样地点云的高程渲染图。


图2 样地点云Fig.2 Sample site cloud
3 单木分割3.1 单木分割方法
UAV-LiDAR点云数据预处理主要包括去噪、滤波、归一化及生成CHM。论文首先采用基于空间分布的去噪算法去除原始点云包含的噪声点,接着基于改进的渐进三角网加密算法(Improved Progressive TIN Densification,IPTD)[10]分离地面点云与非地面点云,然后对提取的地面点云采用克里金算法(Kriging)插值生成DEM。再利用生成的DEM,对去噪之后的激光点云归一化处理。最后使用R环境(4.0.2)和Rstudio(1.3.1093)中lidR包Point-to-raster算法将高度归一化后的点云数据插值生成CHM,采用数字表面模型计算算法对CHM进行平滑处理来填充CHM生成过程中产生的空值或“孔洞”[11]。
采用局部最大值算法探测经过平滑处理后的CHM上单木顶点,基于CHM树顶探测的结果采用分水岭分割算法[12]、特征点决策树[13]、CHM邻域增长[14]分割单木;基于归一化点云采用点云聚类分割算法[15]分割单木。
为了验证单木分割的准确性,将分割结果与样地调查数据对照,通过计算P、R、F来评估单木分割效果。计算方法如下:
(1)
(2)
(3)
式中,P代表分割正确率;R代表单木探测率;F代表错分和漏分的总精度。其中,TP是分割正确的单木的数量;FP是分割错误的单木的数量;FN是遗漏分割单木的数量[16]。
3.2 单木分割结果分析
3.2.1 单木分割结果目视评价
图3为四块样地经过平滑处理后的CHM单木树顶探测结果,四块样地实测单木272株,探测树顶点数267个,平均探测率达到0.98。
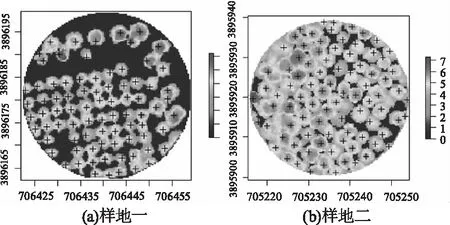
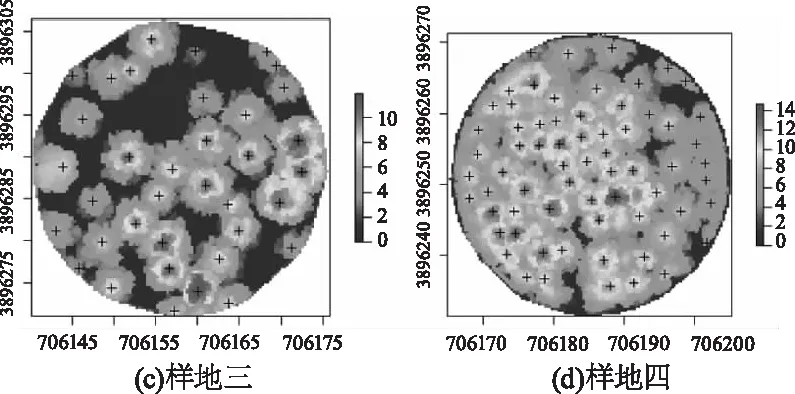
图3 单木树顶探测结果示意图Fig.3 Schematic diagram of single tree top detection results
四种分割算法分割结果如图4所示,由图可知,分水岭算法分割效果较好,总体正确分割单木株数较多,尤其是在林分稀疏的样地一、三,但在林分密集的样地存在漏分与错分情况。四块样地中,特征点决策树算法在样地三分割效果最好。样地一虽同属稀疏林分,但样地女贞单木植株较小,特征点决策树算法应用在此样地时冠幅较小的单木容易漏分。样地四与样地三稀疏雪松样地雪松树龄相似,但样地四种植密度较大,树冠相连,部分单木未能正确分割。CHM邻域增长算法在林分稀疏样地分割结果优于林分密集样地,在林分密集的样地漏分现象明显重于稀疏样地。点云聚类分割算法在四块样地分割时存在漏分现象,特别是在单木之间距离大小不一的样地漏分现象比较明显,同时对于一些树冠大小不一的样地存在分割过度。
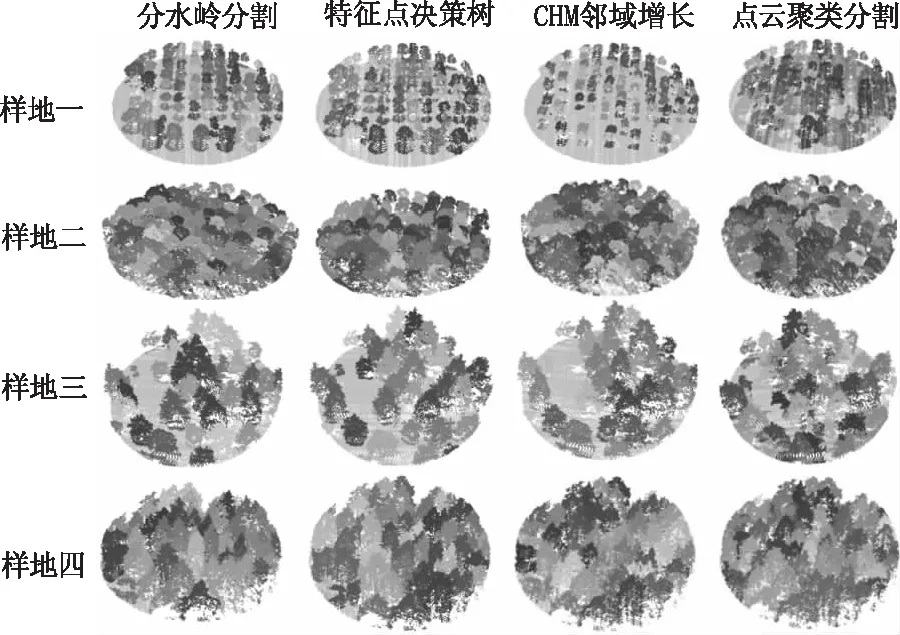
图4 单木分割结果示意图Fig.4 Schematic diagram of single wood segmentation results
3.2.2 不同算法单木分割精度分析
表1显示了四块样地单木分割精度,总体上分割结果较好,F值从0.72~0.98不等,总体F值达到0.89;单木分割准确率R值从0.62~1不等,总体值为0.85;单木检测率P从0.79~1不等,总体值为0.94。四块样地四种算法共分割963株单木,其中正确分割909株,遗漏了179株单木,错误分割54株,分割不足大于分割过度。

表1 基于无人机载激光雷达的单木分割精度评价结果Tab.1 Accuracy evaluation results of single tree segmentation based on UAV LiDAR
四种算法在不同林分的样地中分割精度都有差异,但也具有一定规律。对于样地一,分水岭、CHM邻域增长有着更高的分割精度。对于样地二,特征点决策树能最有效的分割单木。样地三,分水岭分割和特征点决策树分割效果更好。对于样地四,分水岭分割效果最好。从整体的分割结果来看,林分稀疏的样地比林分密集样地分割精度更高,四种算法中,分水岭分割单木精确性和适应性最好。
3.2.3 栅格分辨率对基于CHM分割结果影响分析
CHM本质上是栅格数据,为寻找最适合基于CHM分割算法的栅格分辨率,以样地三为例,分别选取栅格分辨率为 0.1 m×0.1 m、0.3 m×0.3 m、0.5 m×0.5 m、1 m×1 m的 CHM分析分水岭分割、特征点决策树、CHM邻域增长分割算法栅格大小敏感性,结果如图5。三种分割算法中0.3 m×0.3 m分辨率F值均为最高,其次为0.1 m×0.1 m。0.1 m×0.1m 分辨率P值低于0.3 m×0.3 m分辨率,主要是因为CHM分辨率过大,CHM表面出现很多与真实冠层高度不相符的凹凸坑,进而出现单个树冠被分为多个的过分割现象。分辨率的F值最低的为1 m×1 m。分析原因为分辨率过小,冠层高度过于平滑,局部最高点模糊,遗漏分割现象较明显。

图5 基于CHM分割算法栅格分辨率敏感性分析统计Fig.5 Statistical analysis of grid resolution sensitivity based on CHM segmentation algorithm
3.2.4 UAV-LiDAR点云密度对点云聚类分割结果影响分析
为了测试点云密度对点云聚类分割的影响,将样地三激光雷达点云从原始密度100 %(65 pts·m-2)分别抽稀至50 %(32 pts·m-2)、20 %(13 pts·m-2)和10 %(6.5 pts·m-2)。图6显示出了100 %、50 %、20 %、10 %密度点云以及具有四个点云密度的样地点云聚类分割效果。(a)、(b)、(c)、(d)分别为100 %、50 %、20、10 %密度 UAV-LiDAR点云。(a1)、(b1)、(c1)、(d1)分别为100 %、50 %、20 %、10 %密度的点云聚类分割单木分割效果。(a2)、(b2)、(c2)、(d2)分别为在100 %、50 %、20 %、10 %密度时UAV-LiDAR单木分割的二维效果,(a3)、(b3)、(c3)、(d3)分别为在100 %、50 %、20 %、10 %密度时UAV-LiDAR单木分割的三维凸包。这些结果显示所有密度下点云聚类分割算法都成功地检测到了单木。

图6 UAV LiDAR点云100 %、50 %、20 %、10 %密度时点云聚类分割结果Fig.6 Segmentation results of UAV LIDAR point clouds with 100 %,50 %,20 % and 10 % density
从不同点云密度下点云聚类分割结果表(如表2所示)可以看出随着点云密度的降低,样地被正确识别的单木数量在降低,点云密度100 %时正确识别的树为23株,当点云密度下降到 10 %,正确识别的树也下降至16株。此外漏分的单木的数量呈增加趋势,当点云密度为 100 %时,漏分的树木为9株,当点云密度下降到10 %时,漏分的树木增至 16株。错分的单木数量随着点云密度的下降呈增加趋势,当点云密度为 100 %时,错分的树木为5株,当点云密度下降到 10 %时,错分的株数为7株。总体分类精度成下降趋势,当点云密度为 100 %,F值为 0.77,当点云精度降至50 %,F值仍维持在良好的状态为 0.72,当点云密度为10 %,F值降到 0.58,F值降低了 0.19。

表2 不同点云密度下点云聚类算法的单木分割结果Tab.2 Single tree segmentation results of point cloud clustering algorithm under different point cloud density
4 结 论
无人机载激光雷达作为一种新兴的主动遥感技术,能够精确估计植被和地形高度,在分割单木、获取单木参数信息等精准林业研究中发挥了重要作用。本研究对基于UAV-LiDAR点云数据的单木分割算法进行了系统研究,结果如下:
(1)基于无人机载激光雷达技术分割单木结果较好,单木分割准确率R值总体为0.85;单木探测率P值总体为0.94。林分稀疏的样地比林分密集样地分割精度更高,四种算法中,分水岭分割单木精确性和适应性最好。
(2)选择合适的CHM分辨率有助于提高单木分割精度,栅格分辨率为0.3 m×0.3 m时基于CHM分割算法分割结果均为最优。
(3)点云聚类分割算法分割单木效果的好坏与样地内树木点云密度大小有关,且随着点云密度的降低,点云聚类分割算法分割精度降低。当点云密度为 100 %(65 pts·m-2),F值为 0.77,当点云密度为10 %(6.5 pts·m-2),F值为 0.58,F值降低0.19。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
农业工程学报(2022年14期)2022-10-19 02:24:48
地理空间信息(2021年10期)2021-11-14 10:01:12
汽车观察(2021年8期)2021-09-01 10:12:41
中国交通信息化(2019年1期)2019-03-26 06:43:46
遥感信息(2019年1期)2019-03-22 01:38:16
兽医导刊(2019年1期)2019-02-21 01:13:44
电子制作(2018年16期)2018-09-26 03:27:00
森林工程(2018年5期)2018-05-14 13:54:30
城市道桥与防洪(2014年1期)2014-02-27 07:24:36