
基于体元逐层聚类的TLS点云数据单木分割算法
2017-12-19 06:32邢万里邢艳秋尤号田
中南林业科技大学学报 2017年12期
邢万里 ,邢艳秋 ,黄 杨 ,曲 林 ,尤号田
(1. 东北林业大学 森林作业与环境研究中心,黑龙江 哈尔滨 150040;2. 黑龙江省测绘科学研究所,黑龙江 哈尔滨 150040)
基于体元逐层聚类的TLS点云数据单木分割算法
邢万里1,邢艳秋1,黄 杨2,曲 林2,尤号田1
(1. 东北林业大学 森林作业与环境研究中心,黑龙江 哈尔滨 150040;2. 黑龙江省测绘科学研究所,黑龙江 哈尔滨 150040)
为了提高地基激光雷达(Terrestrial Laser Scanning, TLS)点云数据的单木分割精度及分割效率,以落叶期的蒙古栎人工林为研究对象,以TLS为基础数据,在三维点云数据体元化的基础上提出一种基于体元逐层聚类的单木分割算法,通过分析体元在竖直方向的z值序列准确获取单木的位置,然后利用模糊C均值算法以单木位置为初始聚类中心从最底层体元开始进行逐层聚类,最终实现样地水平蒙古栎单木分割。研究结果表明,通过分析体元在竖直方向的z值序列能准确获取单木的位置,本研究提出的单木分割算法能够实现样地水平单木的精确分割。
地基激光雷达TLS,体元,逐层聚类,模糊C均值,单木分割
林业资源调查为不同用户层面的生态系统的管理和规划提供依据,大到全球的政治决策小到地区林业的经营和管理,样地调查则是林业资源调查的基础。传统的样地调查工具如胸径尺、测高仪等测量效率低,而自从地基激光雷达(Terrestrial Laser Scanning, TLS)被应用到林业调查中以来,情况已经发生了巨大的变化。TLS通过测量扫描仪和目标之间的距离快速获取物体表面高密度高精度的三维点云数据,在不破坏林木结构的基础上,实现单木垂直结构参数的自动提取。
TLS被应用到样地调查始于2000年左右[1-2],首先被应用到了单木位置、树高、胸径等林木属性的评估中[3-4],后来研究逐渐朝着树干曲线[5]、冠层结构[6-8]、量化结构模型[9-10]的方向发展,从最初的单木结构参数提取到完整单木的建模,对林木结构的研究越来越精细。已有的关于冠层结构分析,量化结构模型的研究对象多为单木,而TLS被应用到林业中主要目的是为了替代传统的样地调查手段并为大尺度遥感技术如机载激光雷达(Airborne Laser Scanning, ALS)和光学遥感等提供验证数据,所以未来的主要研究趋势之一必然是样地尺度的单木精细建模。随着硬件技术的快速发展,一个样地的数据量已经达到了几千万到几十亿个点,一站数据的扫描时间不超过5分钟,但是PC端的海量点云数据处理依然面临着很大的局限性[11],即直接对所有的点云数据进行处理效率很低,因此有必要采用分而治之的思想,先进行样地点云数据的单木分割,然后再针对单木数据进行参数提取和建模。已有的单木分割研究中,大量的单木分割算法被用于ALS点云数据[12-13],其主要思想是通过识别树冠的高度分割单木,但由于TLS只能准确扫描冠层以下的林木结构[14-15],所以这种方法在TLS单木分割方面可行性不高。目前TLS点云数据的单木分割依然十分具有挑战性,尤其是在林木密集、单木形体不规则和树干弯曲生长情况下的单木分割。已有的关于TLS点云数据的参数提取多集中在单木的识别,然后假设以单木位置为圆心指定半径圆柱区域内的点云数据为该单木的数据[16-17],这种方法必然无法准确分割密集且弯曲生长的单木。也有一些研究对道路两旁的行道树进行单木分割[18-19],但是行道树之间规则分布,所以这些分割方法应用到样地TLS点云数据时适用性较低。
很多研究者认为多测站配准点云数据可行性较低,因为林地内的标靶通视性较差,标靶的设置以及手动配准点云数据所耗的时间是扫描时间的几十倍以上,且多测站点云数据配准结果往往误差较大[20-21]。综上所述,为了实现密集生长且形体不规则林木点云数据的准确分割并提高单木分割精度及分割效率,本研究以落叶期的蒙古栎人工林单测站扫描数据为研究对象,以TLS单测站三维扫描数据为基础,在三维点云数据体元化的基础上提出一种基于体元逐层聚类的单木分割算法。该算法充分利用体元能够分割三维空间的优势,通过分析体元在竖直方向的z值序列准确获取单木的位置,然后利用模糊C均值(Fuccy C-Means, FCM)算法以单木位置为初始聚类中心从最底层体元开始进行逐层聚类,每一层的聚类中心能够准确地追踪树干的生长趋势,最终实现样地水平蒙古栎点云数据的单木分割。
1 研究方法
1.1 研究区及数据介绍
本研究以东北林业大学实验林场(45°43′19″N,126°37′43″E)的蒙古栎人工林为研究对象,样地内平均树高为9.94 m,平均胸径为13.68 cm,林分平均密度为2 575 株/hm2,单木位置无规则分布,仅有乔木层,无灌木层和草本层。利用地基激光雷达Trimble GX 3D扫描仪对样地进行扫描采样,扫描过程中设置距离100 m处扫描密度为80 mm ×80 mm,最大视场角为360°×60°,扫描数据在Realworks软件平台中显示(见图1),图中可以看出该林分中林木比较密集。扫描数据获取的时间为2015年11月1日,此时蒙古栎已经落叶,本研究选择单测站点云数据作为实验数据,为更好地观察和分析本研究所提出单木分割算法的效果,设定了不同的观测尺度,分别对6株树、10株树、20株树进行分割。

图1 原始点云数据Fig.1 The raw point cloud data
1.2 TLS点云数据单木分割算法
TLS扫描获取的蒙古栎林点云数据,虽然能够真实呈现蒙古栎林的内部结构信息,但点云数据量巨大且信息冗余混杂,为提高样地单木结构参数提取的效率,本研究提出了一种基于体元逐层聚类的单木分割算法,旨在实现样地点云数据中单木的准确识别和分割。
1.2.1 获取单木位置
单木位置是在点云数据体元化的基础上,通过分析每个体元坐标(x,y)位置处体元的z值序列进行确定。体元的坐标计算公式为如公式(1)所示,

式(1)中:(xmin,ymin,zmin)为所有点的x,y,z坐标的最小值,l体元的边长, fl oor为向下取整,记录位于每个体元内的点,然后统计每个体元的相邻26个位置存在的体元的个数。将孤立的体元和体元内点数小于3的体元视为噪声并删除。
计算每个体元坐标(x,y)位置处对应体元的z值序列,要求单木位置的体元满足2个条件:(1)竖直方向的体元数大于阈值h;(2)坐标z≤h的体元数大于h/2,由于树干的倾斜生长和单木位置刚好位于体元的边界可能导致同一株树的位置获得多个距离较近的体元坐标,因此需要对剩余的体元坐标之间的距离进行约束:由于同层相邻体元坐标之间的距离为1或因此对于距离小于2的坐标,计算其z值序列交叉元素中第i个元素(从小到大排列)对应体元中点云中心之间的水平距离d,因为z值序列第1个交叉元素很可能是地面点,所以此处设置i=2,如果d<0.3 m保留坐标z≤h的体元数最多的位置,如果坐标z≤h的体元数相同,保留总的体元数最大的位置,如果总的体元数相同,保留z值序列差分和最小的位置,最终获取的体元坐标(x,y)对应的体元中心在点云坐标系中的坐标即为单木的位置,坐标计算公式如公式(2)所示:

式(2)中,(X,Y)为体元坐标。考虑到单木最小间距不足1 m,且蒙古栎树干较弯曲,本研究设置体元边长为0.5 m,因为平均树高约为10 m,阈值h设置为10,即对应5 m的高度。
1.2.2 基于体元的逐层聚类
体元逐层聚类是以获取的单木位置为初始聚类中心,利用模糊C均值算法对最底层体元内的点云数据进行分类,第i层获取的聚类中心作为第i+1层的初始聚类中心逐层进行聚类。以获取的单木位置作为初始聚类中心V0,利用FCM算法对最底层体元内的点云数据的水平坐标进行聚类,由于树干处点云密度较大,且水平投影面积较小,因此树干水平投影处点云密度非常大,对点云数据的水平坐标进行聚类可以保证聚类中心尽可能靠近树干。FCM算法如公式(3)所示。
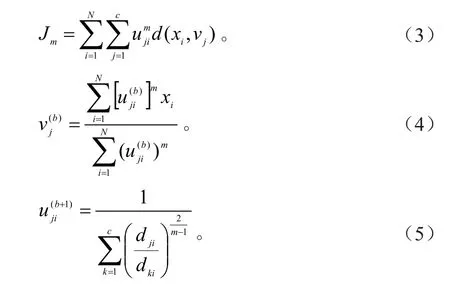
式(3)至式(5)中,目标函数Jm的一个解可以通过迭代算法获得,xi是2维坐标向量,N是点数,c是类别数由获取的单木位置个数确定,迭代过程c不改变,m为模糊度,vj是第j类的聚类中心,见公式(4),uji是xi在第j类中的隶属度(见公式5),d(xi,vj)是样本xi到聚类中心vj的欧式距离。聚类过程中通过初始聚类中心V0计算初始隶属度矩阵U0,迭代获取目标函数Jm最小时对应的Vt,以聚类中心Vt计算模糊隶属度矩阵Ut,设置模糊度m=2,迭代次数为30次,迭代临界值ε=0.000 1,将每个样本数据划分到对应隶属度最大的类别,第i层获取的聚类中心为第i+1层的初始聚类中心进行逐层聚类。
因为样地点云数据内的地面点是离散且不规则的,对地面点的聚类过程可能会导致聚类中心的严重偏离,所以本研究设置在z≤3时第i层中迭代获取的各类别聚类中心相比其初始聚类中心的偏移距离不得超过0.5 m,如果第i层中某类别的聚类中心偏移距离超过0.5 m,则以第i层的该类别的初始聚类中心替换迭代结果中该类别的聚类中心。
因为单测站样地点云数据内部遮挡严重,部分单木树干竖直方向会出现间断,在逐层迭代过程中可能会发生聚类中心跳跃到相邻的树干处的情况,甚至是相邻单木互换聚类中心,造成单木的错误分割,所以必选限制聚类中心的偏移距离,但是考虑到单木树干弯曲生长,为防止阻碍聚类中心正常沿树干生长方向偏移,该约束偏移距离不能太小。本研究设置z>3时第i层迭代获取的各类别聚类中心相比初始聚类中心偏移距离不得超过1 m,如果第i层中某类别的聚类中心偏移距离超过1 m,则以第i层该类别的初始聚类中心替换迭代结果中该类别的聚类中心。
因为单木的高度不同,较低单木在顶部几层中树冠点较少甚至没有树冠点,在对树顶分割的过程中容易发生较低单木的聚类中心逐渐跳跃到相邻单木的树冠中分割其树冠点的情况,所以必须约束各类别聚类中心之间的距离。本研究设置聚类中心之间的间距不得小于0.5 m,如果第i层迭代获取的聚类中心中某两个类别之间的距离小于0.5 m,则以其初始聚类中心替换迭代结果中对应的聚类中心。
2 结果与分析
2.1 单木位置识别结果
针对实验数据分析每个体元坐标(x,y)位置处对应体元的z值序列,获取满足约束条件的坐标,以这些坐标对应体元中心的实际坐标为圆心构造圆柱,半径为0.25 m,即圆柱与对应的体元内切。单木位置和原始数据在Terrasolid软件平台中显示(见图2),图中部分单木树干与圆柱的夹角过大,表明这些单木树干弯曲角度较大,获取的单木位置能够与单木数据准确对应,并且没有出现错误识别单木的情况,图中某些单木位置对应的圆柱并不包含树根位置,即获取的单木位置与单木的真实位置之间存在误差,这主要是由于蒙古栎的树干弯曲导致的,但是获取的单木位置对应的圆柱包含了绝大部分的树干,所以可以为下一步的逐层聚类提供较准确的初始聚类中心。

图2 单木位置分布Fig.2 Locations of trees
2.2 逐层各类别聚类中心获取结果
以获取的每一层各类别的聚类中心为圆心半径为0.25 m构造圆弧来显示聚类中心的位置,聚类中心和原始数据在Terrasolid软件平台中显示(见图3~图5)。
图3(a)为6株树的逐层聚类中心,图中可以清晰明确的判别所有的聚类中心和单木的位置关系,所有单木的主要树干都准确地被聚类中心对应的圆弧包围,图3(b)中为6株树中单木形体最不好的1株树,树干在z=14位置处分叉,一个树杈很短,另一个树杈长势较好,图中聚类中心依然能够准确的随树干和主要树杈的生长方向偏移,效果比较理想。
图4(a)为10株树的逐层聚类中心,图中代表聚类中心的圆弧紧随着树干的生长方向移动,图4(b)为图4(a)中从左到右第5株树,该单木严重倾斜生长,图中z≤3时的聚类中心偏离了树干位置,这是因为在对部分地面的分割过程中,迭代获取的聚类中心与初始聚类中心的偏移距离大于约束的最大偏移距离0.5 m,因此迭代获取的聚类中心被初始聚类中心替换,而此时的初始聚类中心就是单木位置。z≥3时聚类中心紧随树干的倾斜生长方向偏移,顶部2层的聚类中心并没有偏移,这是因为这两层几乎没有点云数据,此时聚类过程中迭代获取的聚类中心正常情况下会跳跃到相邻含有点云数据的类别,但是由于约束了各类别偏移距离不得超过1 m,因此这两层的聚类中心重复顶部第3层的聚类中心,效果比较理想。

图3 6棵树的逐层聚类中心位置Fig.3 Locations of cluster centers of 6 trees layer by layer

图4 10棵树的逐层聚类中心位置Fig.4 Locations of cluster centers of 10 trees layer by layer
图5(a)为20株树的逐层聚类中心,由于单木间距较小导致不能清晰判别部分聚类中心和单木位置关系,但图中底部的树干全都在聚类中心所在的圆弧内,图中左侧的5株单木的树高小于右侧的单木,顶部2层几乎不包含点云数据,其聚类中心没有发生偏移,这同样是因为设置了聚类中心最大偏移距离1 m,所以这2层的聚类中心重复初始聚类中心,图4(b)为倾斜角度最大的单木,图中底部3层不包含树干点云数据,所以其聚类中心偏离了树干的位置,但偏移距离不大,z≥3时聚类中心紧随树干的倾斜生长方向偏移,效果比较理想。

图5 20棵树的每层聚类中心位置Fig.5 Locations of cluster centers of 20 trees layer by layer
通过以上分析可见,本研究所提出的基于体元逐层聚类的单木分割算在逐层获取各类别聚类中心的过程中,所获取的聚类中心紧随单木树干的生长方向移动,且不会受到单木的形体不规则、树干弯曲和单木数量的影响。
2.3 点云数据单木分割结果
利用本研究提出的单木分割算法分割三组点云数据,分割结果在Terrasolid软件平台中显示,显示结果如图6~8所示,图中被黑色多边形标记部分为错误分割的点云数据。
图6为6棵树的分割结果,图中每株树都包含完整的树干,表明单木的树干均得到了正确的分割,树根处的地面点都被准确地分割到了对应的类别,可拱提取准确的高程初始值,如图6(e)所示,图中标记处为单木f被误分到单木e中的点云数据,单木e和f的位置关系如图6(g)所示,图中单木f的树干分为2个树杈,其中一个树杈朝单木e生长,该树杈末端距离单木e较近的点云被分割到了单木e中,其它单木树冠的分割效果较理想。

图6 6株树分割结果(图中多边形内部为错分点云)Fig.6 Segmentation results of 6 trees (points inside the polygon were wrongly segmented in the fi gures)
图7为10棵树的分割结果,图中每株树的树干都得到了正确的分割,每个类别都包含了树根位置的地面点,图7(a, b)中所标记部分为相邻单木树冠边缘被误分到该类别的少量点云数据,其它单木树冠的分割效果较理想。

图7 10株树分割结果(图中多边形内部为错分点云)Fig.7 Segmentation results of 10 trees (points inside the polygon were wrongly segmented in the fi gures)
图8为20棵树的分割结果,图中不存在单木树干错误分割的现象,树根处的地面点都得到了正确的分割,图8(f, r)中所标记部分为相邻单木树冠边缘被误分到该类别的点云数据。如图8(t)所示,图中标记部分为单木s的右侧部分枝干被分割到了单木t中的点云数据,二者之间的相对位置关系如图8(u)所示,单木s的主干分叉为2个树杈,单木t倾斜角度较大,顶部树冠位于单木s两个树杈的中间,错误分割是因为单木的聚类中心只有一个,沿主要树杈移动,而单木t顶部树冠位于单木s的中间,因此必然会有一个树杈的点云数据被错误分割到单木t的类别,其它单木树冠的分割效果较理想。

图8 20株树分割结果(图中多边形内部为错分点云)Fig.8 Segmentation results of 20 trees (points inside the polygon were wrongly segmented in the fi gures)
从以上3个尺度的分割结果可见,本研究提出的基于体元逐层聚类单木分割算法能够准确地分割单木树干,地面和绝大部分树冠,分割效果不受单木形体不规则和树干弯曲生长的影响,单木数量也不会影响分割效果,但是由于FCM算法是基于距离的聚类方法,所以树冠距离较近的时候,树冠边缘细节方面存在少量点云数据的错误分割。对于树干分叉且枝杈夹角比较大的情况,由于聚类中心容易沿主要树杈移动,所以其中一个枝杈的部分点云数据很容易被分割到距离较近的相邻单木。分割结果中,地面的正确分割满足树高初始位置提取的要求,树干准确分割满足胸径和树干曲线提取的条件,单木树冠内部的准确分割满足单木树高最高值提取的要求,即本研究提出的单木分割算法的点云数据分割结果满足胸径、树高、树干曲线的提取。
3 结论与讨论
本研究提出了一种基于体元逐层聚类的单木分割算法,然后利用该算法对落叶期蒙古栎人工林TLS点云数据进行处理,实现了单木的精确分割,所得结论如下:
(1)通过分析体元坐标(x,y)位置的z值序列可以准确地识别点云数据中的单木位置。
(2)本研究提出的基于体元逐层聚类的点云数据单木分割算法能够准确地分割单木树干和绝大部分树冠,即使严重倾斜生长的单木的也能得到准确的分割。
(3)本研究提出的单木分割算法能够准确分割单木位置处地面点,并且无需进行地面点滤波和高程归一化,在不破坏样地点云结构的前提下实现了单木的准确分割。
对先前TLS单木分割进行分析发现,不同研究学者采用多种方法对其进行尝试,如:Wu等(2013)利用基于体元的邻域搜索算法实现了行道树的单木分割,所得精度相对较高,这主要是因为行道树分布相对较为规则,树间距较大且相邻单木树冠没有交叉,因而单木分割精度相对较高。然而,若单木结构呈不规则分布,相邻单木树冠相互交叉,且部分树干严重弯曲生长时,会造成单木分割精度降低。如:Bienert等(2006)和Maas等(2008)均利用圆柱分割法对自然条件下的森林单木进行分割,结果精度相对较低。这主要是因为该方法将以单木位置为圆心的圆柱内的点云数据视为单木数据,没有考虑到树干倾斜角度较大且形体不规则的单木,容易造成树干和树冠的严重错误分割,因此单木分割精度相对较低。为了凸显本研究所提单木分割算法的优越性,选择形体不规则(树干倾斜、树冠重叠)的蒙古栎人工林作为单木分割对象,最终所得单木分割结果高于Bienert等(2006)和Maas等(2008)的结果。这主要是因为本研究所采用的体元逐层聚类单木分割算法充分考虑了单木树干沿竖直方向连续分布的特点,通过分析体元的z值序列能够准确的识别单木位置,利用识别的单木位置作为底层体元点云数据的初始聚类中心开始聚类,第i层获取的聚类中心为第i+1层的初始聚类中心进行逐层聚类,获取的逐层各类别的聚类中心可以准确追踪单木的生长方向,因而,能够准确地分割单木树干、地面和绝大部分树冠,分割效果不受单木形体不规则和树干弯曲生长的影响。
本研究提出的单木分割算法充分利用了体元能够分割三维空间的优势,能够实现落叶期蒙古栎人工林TLS点云数据的单木精确分割,方法简单高效,但是本研究的研究对象仅限于落叶期的人工林且树种单一,因此在接下来的研究中会尝试以未落叶的复杂天然林作为研究对象,检验本研究所提方法的适用性,以期更好的推广本研究所提出的单木分割算法。
[1]Simonse M, Aschoff T, Spiecker H,et al. Automatic determination of forest inventory parameters using terrestrial laser scanning[J].Proceedings of the scandlaser scienti fi c workshop on airborne laser scanning of forests, 2003: 252-258.
[2]Thies M, Spiecker H. Evaluation and future prospects of terrestrial laser scanning for standardized forest inventories[J].Forest, 2004, 2(2.2): 192-197.
[3]Moskal L M, Zheng G. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest[J].Remote Sensing, 2011, 4(1): 1-20.
[4]Srinivasan S, Popescu S, Eriksson M,et al.Terrestrial Laser Scanning as an Effective Tool to Retrieve Tree Level Height,Crown Width, and Stem Diameter[J]. Remote Sensing, 2015,7(2):1877-1896.
[5]Liang X, Kankare V, Yu X,et al. Automated stem curve measurement using terrestrial laser scanning[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(3):1739-1748.
[6]Calders K, Newnham G, Burt A,et al.Nondestructive estimates of above-ground biomass using terrestrial laser scanning[J].Methods in Ecology and Evolution, 2015, 6(2): 198-208.
[7]Bayer D, Seifert S, Pretzsch H. Structural crown properties of Norway spruce (Picea abies [L.]Karst.) and European beech(Fagus sylvatica [L.]) in mixed versus pure stands revealed by terrestrial laser scanning[J]. Trees, 2013, 27(4): 1035-1047.
[8]谢鸿宇, 赵耀龙, 杨木壮,等. 基于地面Lidar的树冠体积和表面积测量方法研究[J]. 中南林业科技大学学报, 2015,35(4):1-6.
[9]Côté J F, Widlowski J L, Fournier R A,et al.The structural and radiative consistency of three-dimensional tree reconstructions from terrestrial lidar[J]. Remote Sensing of Environment, 2009,113(5): 1067-1081.
[10]Raumonen P, Kaasalainen M, Åkerblom M,et al. Fast automatic precision tree models from terrestrial laser scanner data[J].Remote Sensing, 2013, 5(2): 491-520.
[11]Biosca J M, Lerma J L. Unsupervised robust planar segmentation of terrestrial laser scanner point clouds based on fuzzy clustering methods[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2008, 63(1): 84-98.
[12]Li W, Guo Q, Jakubowski M K,et al.A new method for segmenting individual trees from the lidar point cloud[J].Photogrammetric Engineering & Remote Sensing, 2012, 78(1):75-84.
[13]Chen Q, Baldocchi D, Gong P,et al.Isolating individual trees in a savanna woodland using small footprint lidar data[J].Photogrammetric Engineering & Remote Sensing, 2006, 72(8):923-932.
[14]Tao S, Wu F, Guo Q,et al.Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories[J]. Isprs Journal of Photogrammetry and Remote Sensing, 2015(110): 66-76.
[15]Yang B, Dai W, Dong Z,et al.Automatic forest mapping at individual tree levels from terrestrial laser scanning point clouds with a hierarchical minimum cut method[J]. Remote Sensing,2016, 8(5): 372-389.
[16]Bienert A, Scheller S, Keane E,et al.Application of terrestrial laser scanners for the determination of forest inventory parameters[J].International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2006, 36(5): 1-6.
[17]Maas H G, Bienert A, Scheller S,et al.Automatic forest inventory parameter determination from terrestrial laser scanner data[J]. International journal of remote sensing, 2008, 29(5):1579-1593.
[18]Livny Y, Yan F, Olson M,et al.Automatic reconstruction of tree skeletal structures from point clouds[J]. ACM Transactions on Graphics (TOG), 2010, 29(6): 151-158.
[19]Wu B, Yu B, Yue W,et al.A voxel-based method for automated identification and morphological parameters estimation of individual street trees from mobile laser scanning data[J]. Remote Sensing, 2013, 5(2): 584-611.
[20]Henning J G, Radtke P J. Detailed stem measurements of standing trees from ground-based scanning lidar[J]. Forest Science, 2006, 52(1): 67-80.
[21]Burt A, Disney M I, Raumonen P,et al. Rapid characterisation of forest structure from TLS and 3D modelling[C]// Geoscience and Remote Sensing Symposium. IEEE, 2013:3387-3390.
Individual tree segmentation of TLS point cloud data based on clustering of voxels layer by layer
XING Wanli1, XING Yanqiu1, HUANG Yang2, QU Lin2, YOU Haotian1
(1. Center for Research Institute of Forest Operations and Environment, Northeast Forestry University, Harbin 150040, Heilongjiang,China; 2. Heilongjiang Provincial Research Institute of Surveying and Mapping, Harbin 150040, Heilongjiang, China)
To improve the accuracy and ef fi ciency of individual tree segmentation with terrestrial laser scanning (TLS) data, a new method based on clustering of voxels layer by layeris proposed in this paper. Additionally, the TLS data of Mongolian Oak plantation in deciduous stage is obtained and processed. Then the position of single tree is obtained by analyzing the z-sequence of voxels in the vertical direction. The position of each tree is used as the initial clustering center to start clustering from the bottom voxel layer by fuccy c-means clustering method. The experimental results demonstrate that the position of single tree can be obtained accurately by analyzing the z-value sequence in the vertical direction, the proposed algorithm can segment each individual tree accurately.
terrestrial laser scanning; voxel; clustering layer by layer; fuzzy c-means clustering; individual tree segmentation
10.14067/j.cnki.1673-923x.2017.12.010
http: //qks.csuft.edu.cn
S758.1
A
1673-923X(2017)12-0058-07
2017-04-17
林业公益性行业科研专项经费(201504319)
邢万里,硕士研究生
邢艳秋,教授,博士生导师;E-mail:yanqiuxing@nefu.edu.cn
邢万里,邢艳秋,黄 杨,等.基于体元逐层聚类的TLS点云数据单木分割算法[J].中南林业科技大学学报,2017, 37(12):58-64, 71.
[本文编校:文凤鸣]
猜你喜欢
农业工程学报(2022年14期)2022-10-19
中南林业科技大学学报(2022年1期)2022-02-23
军事文摘(2021年16期)2021-11-05
东方企业家(2020年5期)2020-05-29
山西文学(2019年8期)2019-11-01
文学港(2019年5期)2019-05-24
森林工程(2018年5期)2018-05-14
青年文学家(2017年28期)2017-11-28
绿色科技(2017年17期)2017-09-30
小猕猴学习画刊(2017年1期)2017-02-17
