
农用电动车用永磁同步电机矢量控制系统研究
2018-03-12 07:28宋晓琳胡顺斌张梦洁
江苏农业科学 2018年2期
宋晓琳, 胡顺斌, 张梦洁
(河北农业大学机电工程学院,河北保定 071001)
农用燃油汽车存在功耗大、污染严重、噪声大等问题,在以绿色能源为主导发展方向国家的大力支持下,农用燃油汽车向农用电动车的转变成为必然趋势。农用车具有行驶道路较窄、路况较差、路面凹凸不平、运输距离较短等特点[1],普通的电动机难以满足工况要求。而永磁同步电机以其高效、低功耗、过载能力大、转动惯量小以及转矩脉动小等优点[2]更多地成为农用电动车电机的优先选择。因此,构建以永磁同步电动机(permanent magnet synchronous motor,简称PMSM)为核心,并且符合农村复杂工况条件的调速控制系统非常重要。本研究在已知农用电动车参数的基础上,针对凸极永磁同步电机进行矢量控制研究;通过对永磁同步电机数学模型的分析,借助MATLAB/SIMULINK建立PMSM矢量控制系统的仿真模型,并对其仿真结果进行分析。
1 永磁同步电机的数学模型
三相永磁同步电机的定子和带转子绕组的同步电动机的定子结构是相同的,永磁同步电机和电励磁同步电动机在数学模型上是相似的。为简化分析,在推导中,作如下假设[3]:(1)磁饱和效应忽略不计;(2)感应反电势呈正弦波状;(3)转子上无阻尼绕组;(4)不计涡流和磁滞损耗;(5)电动机定子绕组是三相对称的。
永磁同步电机在a、b、c坐标系下的电压矩阵方程为:
(1)
式中:ua、ub、uc分别为定子绕组的相电压;Rs为定子每相绕组电阻;ia、ib、ic分别为定子绕组相电流;p为微分算子,p=d/dt;ψa、ψb、ψc分别为转子永磁体磁链。
利用坐标变换[4],把a、b、c坐标系变换到d-q转子坐标系,得到相应的动态电压方程:
(2)
式中:ud、uq分别为定子电压矢量us的d、q轴分量;id、iq分别为定子电流矢量is的d、q轴分量;ψd、ψq分别为永磁同步电机直轴、交轴磁链;ωr为转子角频率。
永磁同步电动机定子磁链方程:
(3)
式中:Ld、Lq分别为永磁同步电动机的直轴、交轴主电感;ψr为转子磁链。
永磁同步电动机转矩方程:
Te=pm(ψdiq-ψqid)=pm[ψriq+(Ld-Lq)idiq]。
(4)
式中:pm表示电机极对数。
2 农用电动车用PMSM矢量控制调速方法
永磁同步电机的数学模型具有多变量、非线性、强电磁耦合等特点[5],在过去很难实现良好的调速性能,但随着电力电子技术的迅速发展,各种变频电源、整流装置的研制成功以及计算机技术、控制理论的发展,使永磁同步电机调速系统的发展呈现了崭新的局面。
矢量控制具有电机效率高、转矩稳定、调速范围宽、动态性能好等优点,其控制策略根据交流永磁同步电机运行不同环境、调速范围、性能要求还可分为Id=0控制法、最大输出功率控制法、最大转矩/电流控制法、弱磁控制法等[6]。
3 永磁同步电机的矢量控制调速系统
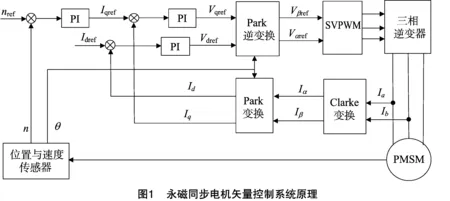
基于永磁同步电机的矢量控制原理[7],构建永磁同步电机矢量控制系统原理图,它由6部分组成,分别为位置与速度检测模块、比例积分调节器(proportional integral,简称PI)模块、坐标变换模块、空间矢量脉宽调制(space vector pulse width modulation,简称SVPWM)模块、逆变器模块及永磁同步电机模块(图1)。
此调速系统由转速外环和电流内环组成,速度给定信号与速度传感器的检测信号相比较,作为速度PI调节器的输入,输出Iqref指令信号;同时电机定子侧的三相交流电经过Clarke变换、Park变换变为交轴和直轴的电流信号Iq和Id;再通过Iq、Id分别和Iqref、Idref相比较,并经过电流环PI调节器调节及Park逆变换得到α-β坐标系下的电压信号Vαref和Vβref;该电压信号通过SVPWM模块对逆变器进行控制,使逆变器产生幅值和频率可变的三相正弦电流输入到永磁同步电机定子绕组,完成永磁同步电机的矢量控制。
4 调速控制系统MATLAB仿真
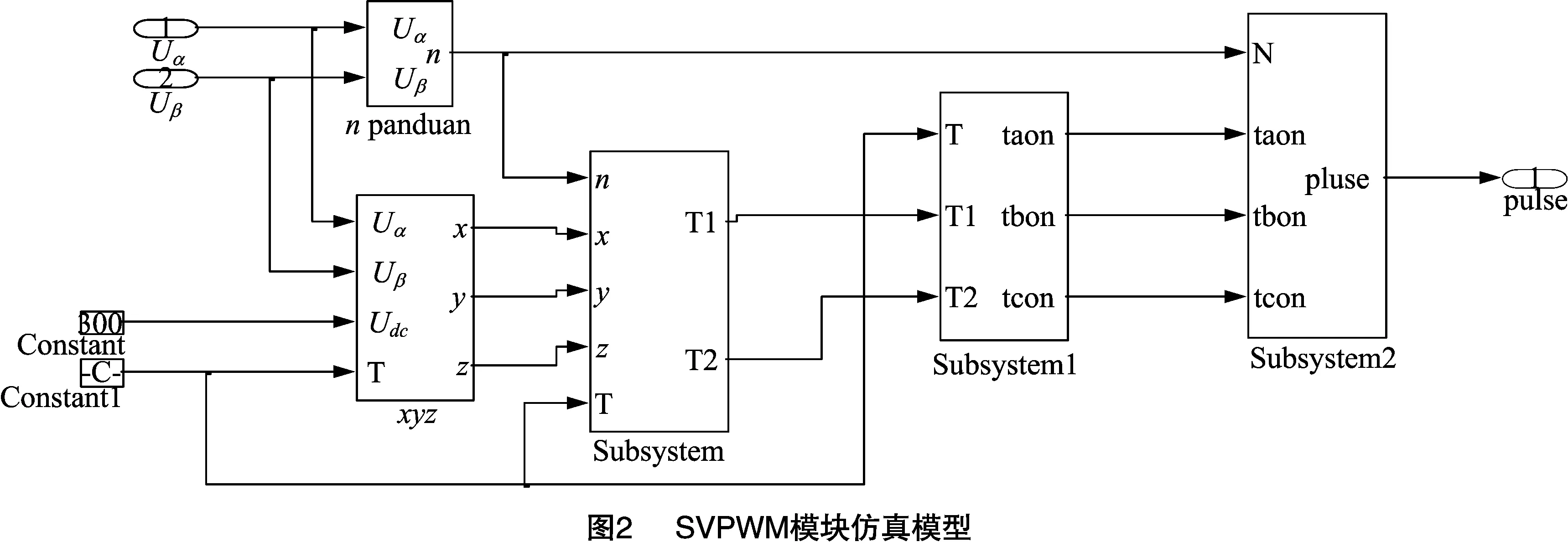
4.1 SVPWM模块
SVPWM技术是从电机的角度出发,以三相对称正弦波电压供电时交流电动机的理想磁通圆为基准,用逆变器不同的开关模式所产生的实际磁通去逼近基准圆磁通,并由它们比较的结果决定逆变器的开关状态形成脉冲宽度调制(pulse width modulation,简称PWM) 波形[8]。SVPWM模块仿真模型比较简单,在实际农用电动车的应用中,便于微处理器的实时控制(图2)。
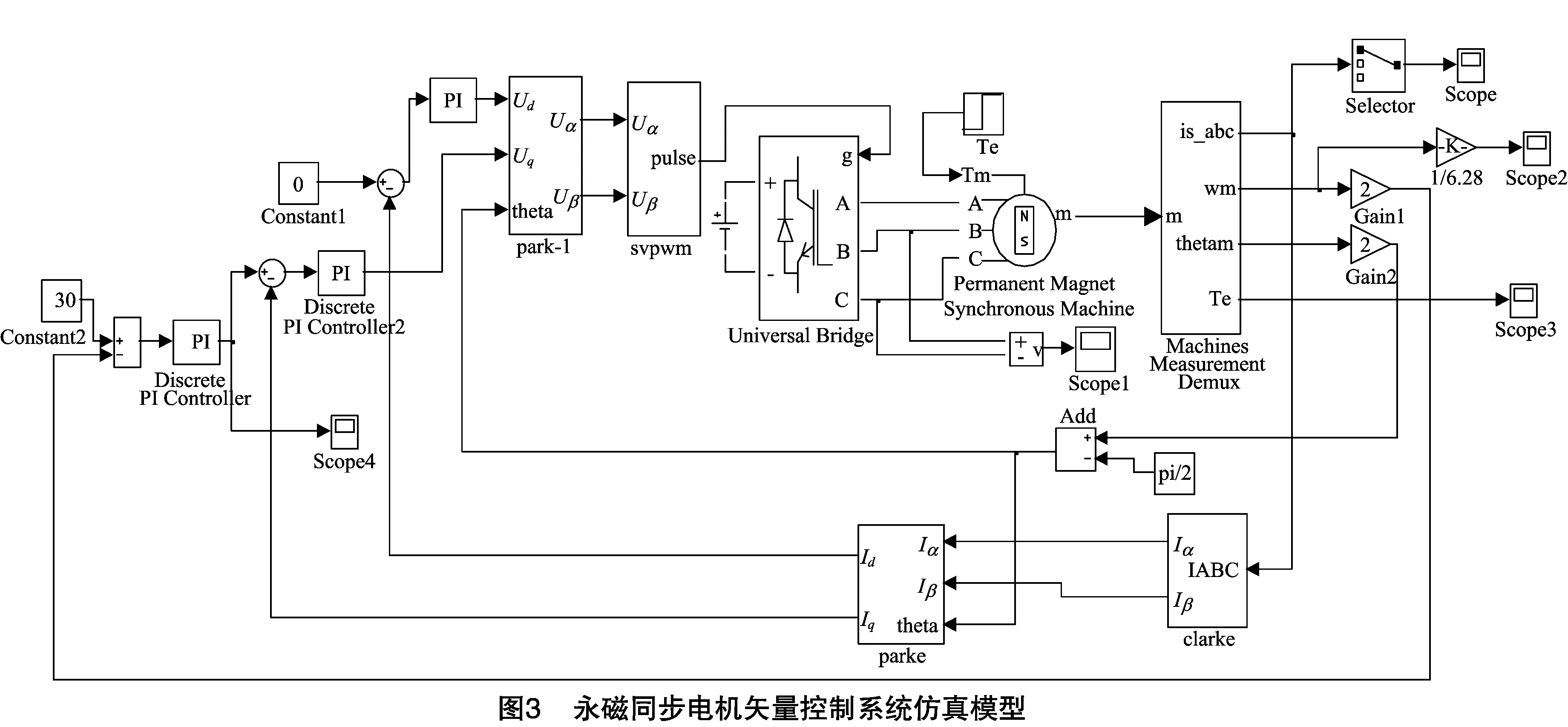
4.2 矢量控制系统的仿真模型及仿真试验
根据永磁同步电机矢量控制原理建立MATLAB/SIMULINK下的仿真模型(图3),系统由电流环和转速环串极连接,电流环为内环,转速环为外环,即把转速调节器的输出当作电流调节器的参考输入,再用电流调节器的输出去控制SVPWM的输出脉冲,调节逆变器的输出,实现永磁同步电机的调速控制。
以矢量控制为基础,根据实际工况要求不同,主要对Id=0控制、最大转矩电流比控制及弱磁控制3种控制方式进行仿真及讨论。汲取前人的经验[9],设置农用电动车用永磁同步电机控制系统的参数:额定功率为11 kW;额定转矩Te=42.02 N·m;额定转速n=2 500 r/min;极对数p=4;电阻R=2.875 Ω;电感Ld=Lq=8.5 mH;磁通密度ψf=0.175 Wb;转动惯量J=0.012 7 kg/m2;摩擦因数F=0.1。
4.2.1Id=0控制 PMSM的电磁转矩值由转子磁链矢量ψf的强弱和直轴电流Id、交轴电流Iq的大小确定。当电动机结构确定后,ψf大小确定,电磁转矩只取决于Id、Iq的大小。因此,矢量控制通过控制电流Id、Iq实现对PMSM电磁转矩的控制。
当转子磁链恒定时,电磁转矩与定子电流的q轴分量即Iq成正比;Id=0时,通过控制定子电流的q轴分量就可以控制电磁转矩。对所建立的仿真模型进行仿真:仿真时间t=2 s,给定转速n*=30 r/s,负载转矩初始值T=5 N·m,t=0.2 s 时转矩突变为10 N·m。仿真结果如图4至图6所示。
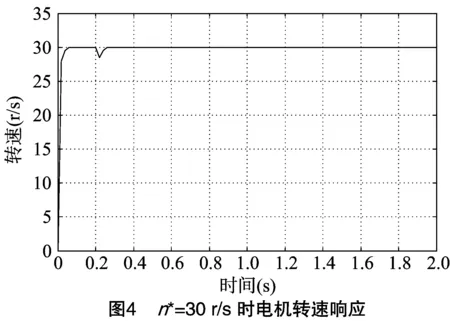
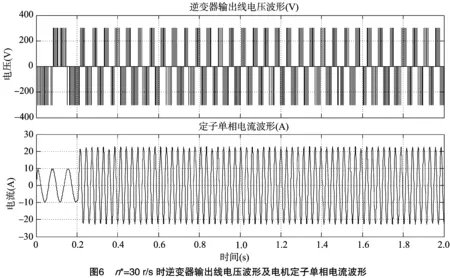
仿真试验结果表明,系统有较好的速度响应和转矩响应,在0.2 s时,随着转矩增加,逆变器输出电压及定子电流随之增大;转矩由5 N·m增加为10 N·m。农用电动车主要用于农作物的运输,而Id=0控制的参数设置简单,电机提速快,转矩变化对转速影响很小,故此方法能够很好地适用于农用电动车用永磁同步电机的控制。
4.2.2 弱磁控制 当农用电动车加速时,电机定子电压也随之升高,直到定子电压达到额定电压,此时若要继续提升电机转速,不能再通过继续升压的方式来实现,只能通过降低励磁磁链减小定子电压的反电动势部分来维持电压平衡。永磁同步电机由永磁体产生主磁场而无法调节励磁磁链,只有通过增加d轴去磁分量来削弱主磁场,使电机转速升到额定转速以上。仿真参数:给定转速为此试验电机的额定转速n=41.66 r/s,仿真时间为2 s,初始给定Id=10 A,负载转矩T=8.5 N·m,仿真结果如图7、图8所示。当Id上调到12 A时,仿真结果如图9、图10所示。
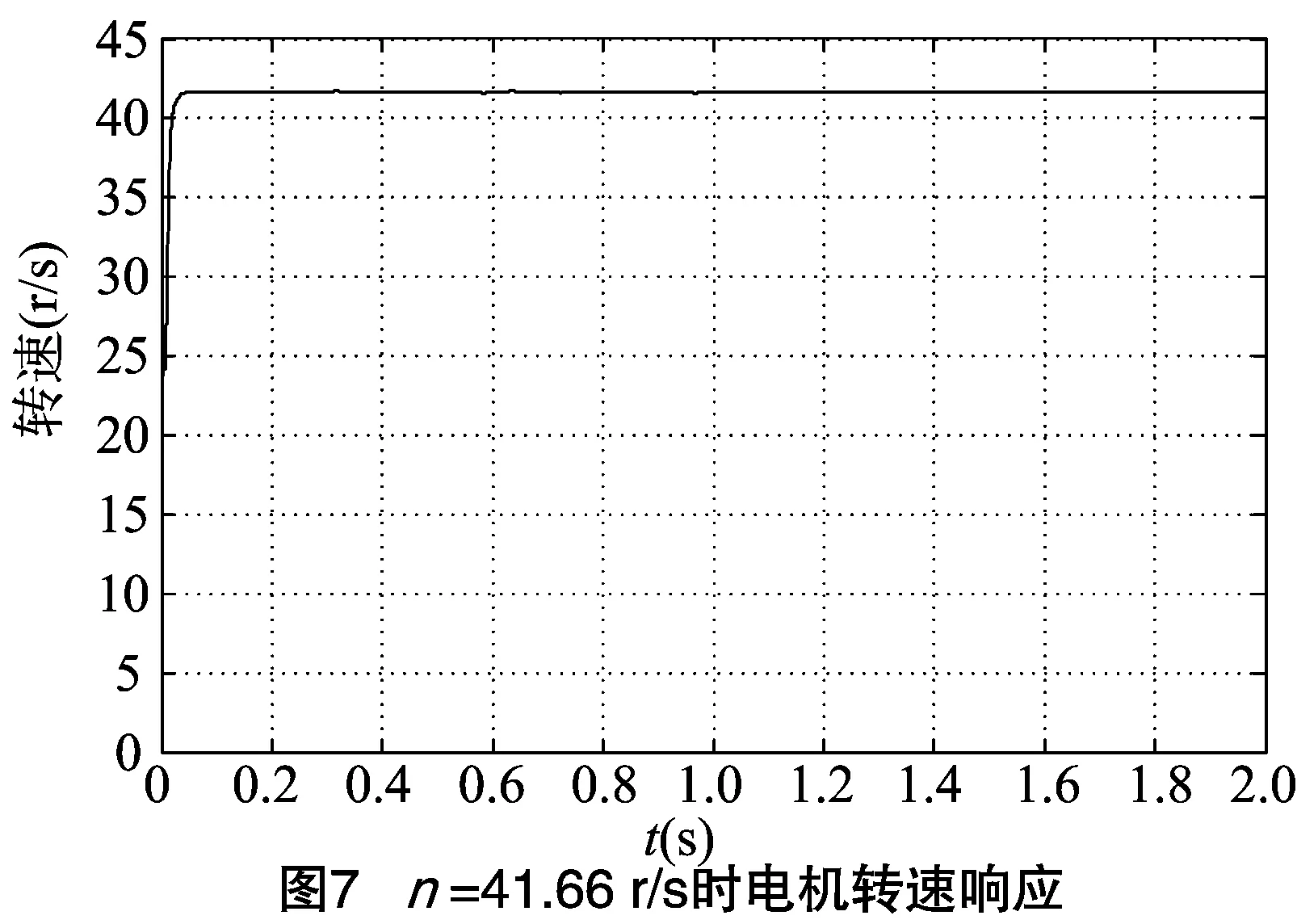
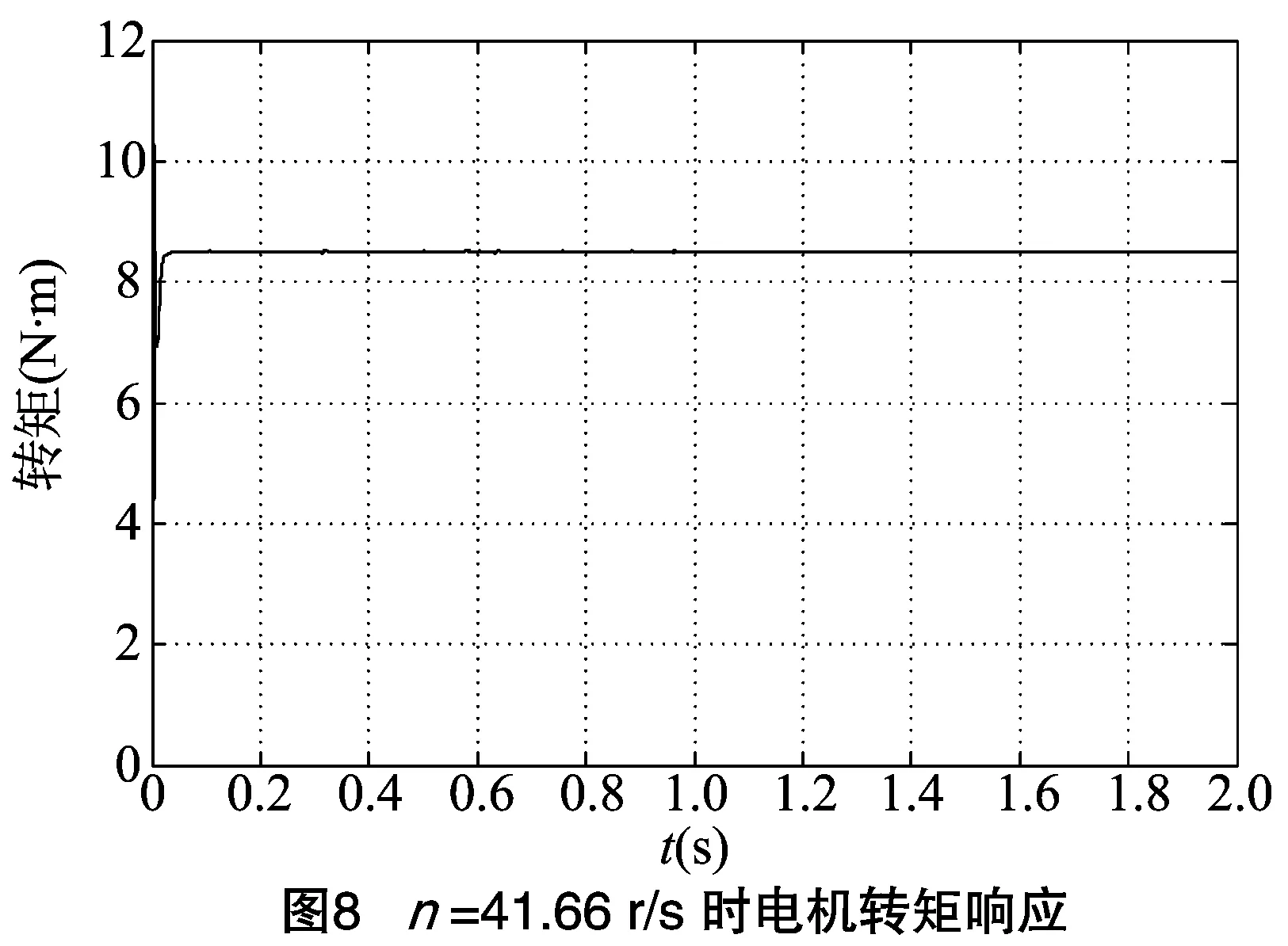
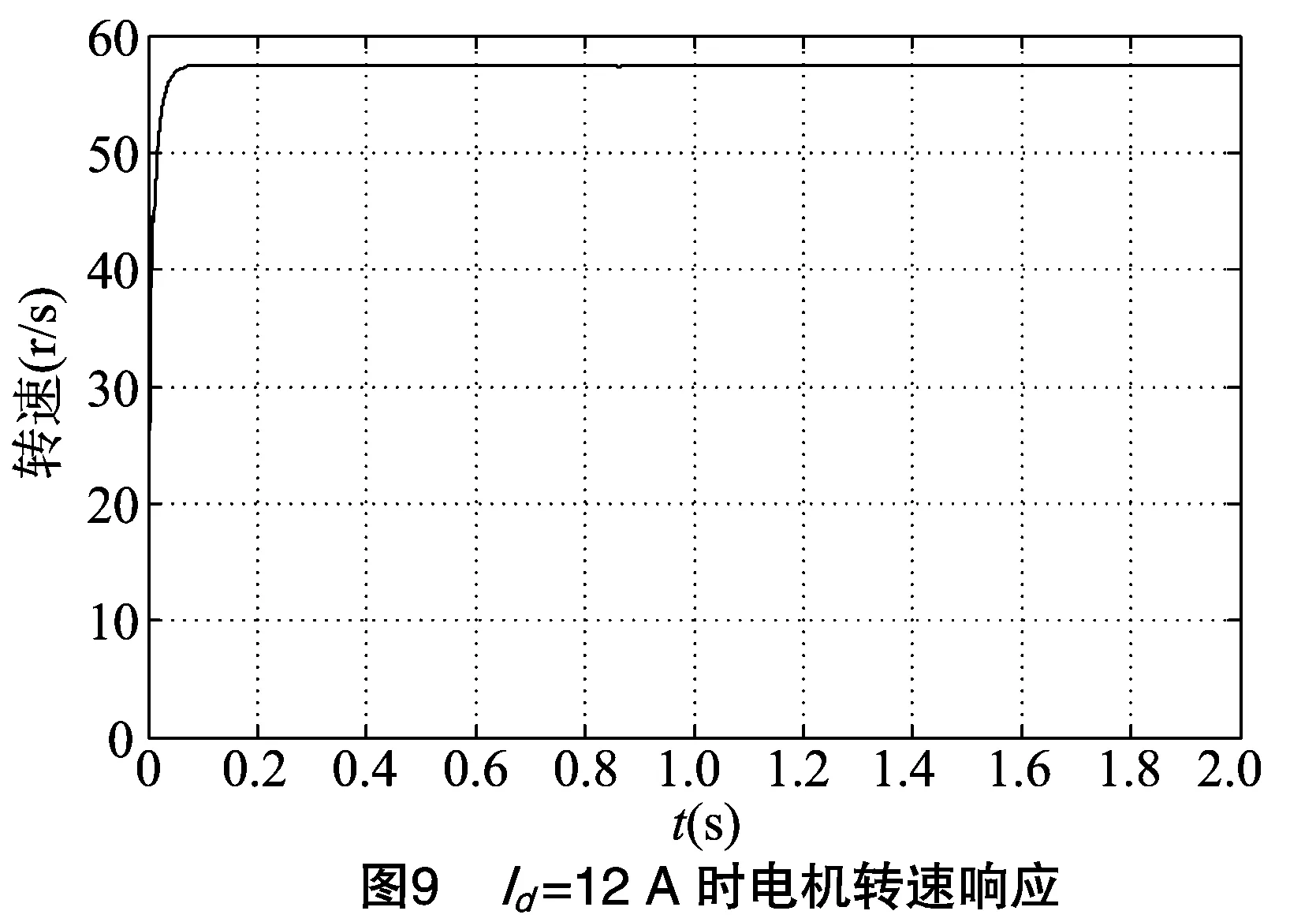
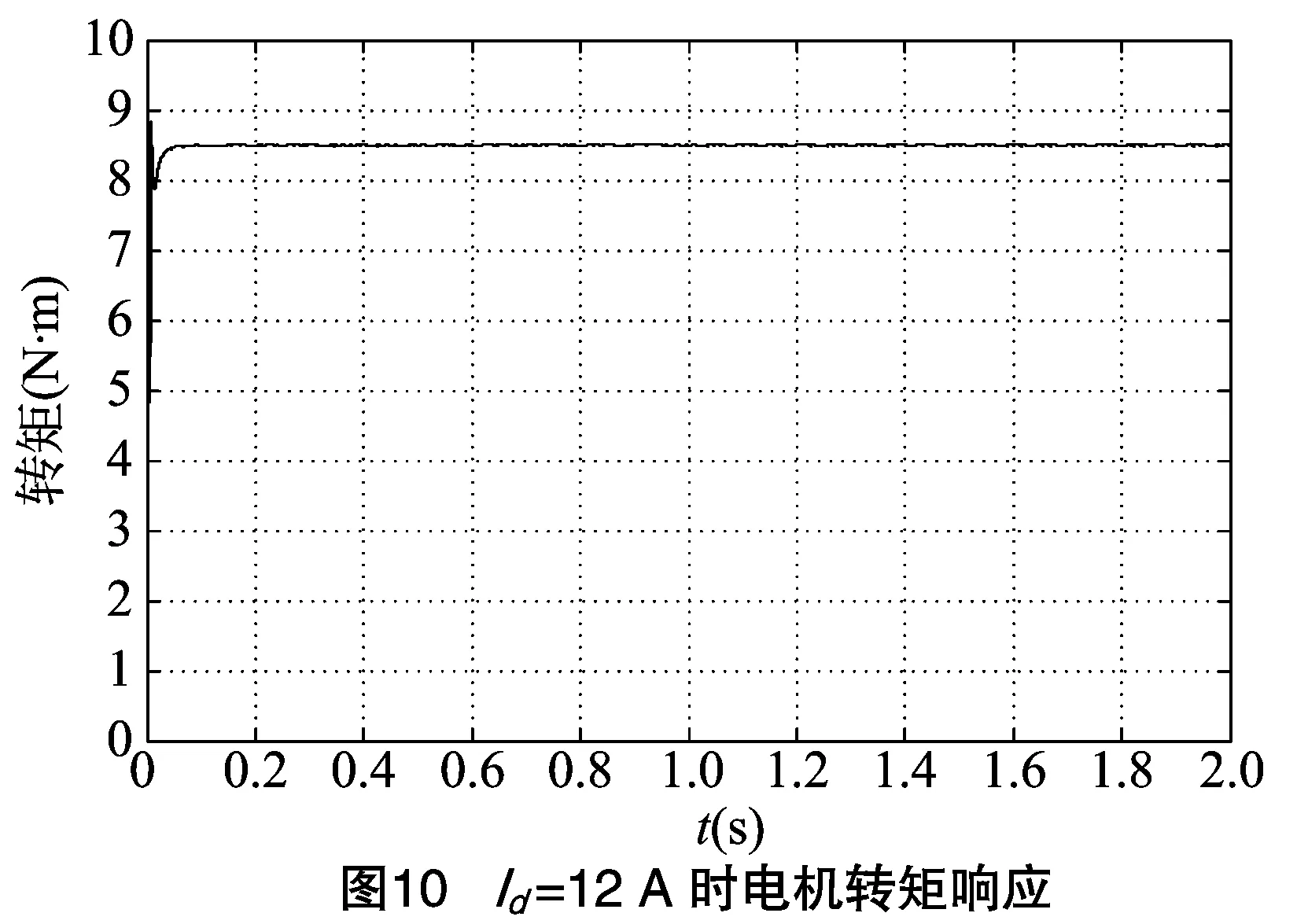
仿真结果(图7至图10)表明,当电机的定子直轴电流增大后,转速快速达到额定转速41.66 r/s,电机电压继续增大,超过了额定电压,转速继续上升,最终增大到57.50 r/s,达到稳定;由转矩波形可以看出,仿真开始瞬间转矩迅速接近给定转矩 8.5 N·m。可见,使用弱磁调速的方法,可以有效地对农用电动车进行调速控制。
4.2.3 最大转矩电流比控制 最大转矩电流比控制是用最小的电流输出最大转矩的控制方法,对电流极值问题进行求解,建立辅助方程,利用牛顿迭代法进行求解。由于计算复杂、数据量大[10],高性能的数字信号处理器(digital signal processor,简称DSP)增加农用电动车的制造成本,而且控制系统的实时跟踪性,不适用于农用电动车复杂的工况环境,故对此方法不作过多论述。
5 结论
Id=0控制与弱磁控制方法均能够有效、迅速、稳定的实现对农用电动车调速控制,可以结合2种控制方法的优点,基速以下进行Id=0控制,通过单独控制Id实现恒速下改变转矩的大小,能够使农用电动车在负载增加的情况下实现恒速运行;弱磁控制使电机在基速以上运行,拓宽了农用电动车的调速范围,能够使农用电动车在恒功率下,获得更高的速度。
[1]叶存达. 全地形农用运输电动车的设计与仿真研究[D]. 厦门:集美大学,2015:1-2.
[2]李钟明,刘卫国,刘景林,等. 稀土永磁电机[M]. 北京:国防工业出版社,1999:183-190.
[3]Pillay P,Krishnan R. Modeling,simulation and analysis of permanent-magnet motor drives. Ⅰ:the permanent-magnet synchronous motor drive[J]. IEEE Transactions on Industry Applications,1989,25(2):265-273.
[4]张文娟. 高性能永磁同步电机控制方法的研究[D]. 长沙:湖南大学,2014:28-30.
[5]巫传专,王晓雷. 控制电机及其应用[M]. 北京:电子工业出版社,2008:87-88.
[6]Chen J J,Chin K P. Automatic flux一weakening control of permanent magnet synchronous motors using a reduced-order controller[J]. IEEE Transactions on Power Electronics,2000,15(5):881-890.
[7]张鹏飞,杜 坚,罗 宾,等. 基于DSP的永磁同步电动机矢量控制系统[J]. 机电工程,2009,26(5):82-85.
[8]郭 伽. 基于MATLAB的SVPWM逆变器的仿真研究[J]. 仪器仪表与分析监测,2010(4):24-26.
[9]王 磊. 农用电动车交流伺服控制系统研发[D]. 哈尔滨:哈尔滨工业大学,2011:8-13.
[10]李星星,邓福军. 永磁同步电动机矢量控制研究[J]. 大连交通大学学报,2015,36(4):97-100.
猜你喜欢
防爆电机(2020年6期)2020-12-14
湖北农机化(2020年4期)2020-07-24
21世纪商业评论(2020年12期)2020-01-14
中国公路(2017年5期)2017-06-01
光学精密工程(2016年3期)2016-11-07
水利科技与经济(2016年3期)2016-04-22
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
