
基于灰度传感器的智能小车避障寻优系统设计与实现
2018-03-11 07:11陈小龙
中国信息化 2018年2期
陈小龙
一、引言
随着移动互联网的飞速发展,人工智能已经成为科技发展的推动力,同时也是目前计算机智能领域最炙手可热的课题之一。而人工智能最具代表性的就是智能化设备的研究,包括智能机器人、智能家居、智能小车、智能家电等。各个高校、科研机构都在开展对智能小车的研究,让智能小车的普及大众化,全国也在举办相应的智能车大赛如“机器人大赛”、“飞思卡尔全国电子设计大赛”、“全国大学生创新大赛”等。所以研究智能小车是当下研究的重点之一。目前智能小车的蔽障和寻迹依靠的主要是红外传感器、距离传感器、灰度传感器等,三种传感器各有优缺。
故本文设计了以OV7670作为视频采集终端的智能小车寻迹,能够根据视频采集到的信号作为寻迹的参照,准确避障。
二、避障系统设计与实现
要实现一个完整的基于摄像头的智能小车寻迹,首先要做的就是将摄像头输出的图像采集到控制器中,然后对采集到的原始图像数据做处理,以获取赛道中央的黑线在图像坐标系中的位置,接着对小车进行转角控制驱动小车转动。由于赛道是白底黑线,所以为达到寻线目的,只需要提取畫面的灰度信息即可,不必提取其他的彩色信息,从而减少控制器的负担。整个软件的流程是:系统初始化——视频图像采集——处理图像(滤波,二值化)——提取中线——计算偏差和PID控制——控制舵机和机电。
(一)硬件设计
本文主要参考的硬件设备为博创提供的智能小车,主要的汽车模型组件为主控电路STM32F103控制器、驱动马达、转向舵机、图像传感器、可充电式电源。程序开发组件为KEIL MDK4.14,作为程序的开发平台,上位机图像程序为Demok Tool Build1114,采用MDK 作为开发平台,开发功能强大易学易用,同时适用于多数对环境要求严苛的嵌入式应用程序开发。摄像头采用带FIFO功能的OV7670摄像头作为路面信息的采集设备,用以采集实时的路面信息,供控制器路面寻迹使用。在STM32F103嵌入式处理器上编写相应程序,使智能跑车在专门设计的跑道上通过灰度图像自动识别道路并完成指定路径的行驶。
(二)图像数据采集与处理
当前在智能小车摄像头采集的数据中,PAL制式和NTSC制式作为主流制式,PAL制式和NTSC制式主要的区别就在于两种制式每秒输出的图像帧数不一样,PAL制式每秒输出25帧图像,而NTSC制式每秒输出30帧图像。现在基于PAL制式的摄像头有OV6620、sonyCCD、LGCCD、OV5116等;而基于NTSC制式的主要有OV7670、OV7620、OV7640等,本文基于OV7670摄像头采用PAL制式的方式,此摄像头30万像素最高分辨率达到640×480,即长宽比为4:3,同时具有较高的分辨率。当智能小车在寻迹的过程中通过摄像头获得轨道实时视频信息后交给视频信号分理处进行处理,进行视频信号处理的同时分离视频信号获得图片信息,通过分析图片从而判断轨道路面是否是边缘黑线,继而寻迹。由于摄像头获取的数据是视频数据,需要进行视频信号的分离。采用视频信号分离,分离出复合同步信号、复合消弭信号、图像视频信号。
(三)边缘数据的滤波以及二值化
由于分离出的信号具有较大的噪声,需要对信号进行滤波,滤波是将信号中特定噪声滤除的操作,是抑制和防止干扰的重要措施。采用中值滤波是一种较好的方式,不仅能够快速的提取轨道线路的边缘信息,而且能够将噪声降到最小。现在主要的边缘检测技术为基于区域的图像分割和基于边缘检测的图像分割。而边缘检测技术提取边缘亮度变化,能够快速检测因而广泛应用在快速检测领域。由于边缘检测提取后的数据具有较大的噪声,为了减少外界信号的干扰,需要对滤波后的数据进行二值化,二值化的主要算法思路是将图片像素点的灰度值设置为0或者255,也就是让整个图像呈现出只有黑白的视觉效果。设定一个阈值Value,对于视频信号矩阵中的每一行,从左至右比较各个像素点值和阈值的大小,若大于阈值则判断该点对应白色赛道,反之对应于目标黑线。当然也可能出现差值始终小于阈值的情况,此时一种方法是令该行上目标黑线位置为0,通过进一步滤波或拟合来修正;另一种方法是让该行上目标黑线位置和通过上一场视频数据求得的位置一样。实验证明进行去噪和二值化的数据具有较高的精确度。
(四)PID舵机转向控制
将提取后的数据送入主控电路进行PID处理,通过与两个边缘点的值做对比,计算前进方向与中线的转角。PID调节是模拟调节系统技术中最成熟、应用最广泛的一种调节方式。其实质是根据输入的偏差值,按比例、积分、微分的函数关系进行运算,运算结果用以控制在实际应用中。根据被控对象的特性和控制要求,可灵活地改变PID的结构,取其中的一部分环节构成控制规律,如比例(P)调节、比例积分(PI)调节、比例积分微分(PID)调节等。特别在计算机控制系统中,更可以灵活应用,以充分发挥微型机的作用。如图1所示,从而驱动转向舵机让其实现加速和转弯的功能。为了减少小车与地面的阻力和摩擦,要求小车在转向时所有的车轮在地面做纯转动,这要求所有的车轮的车轴相交于一点,这一点也称为车轮的转向中心。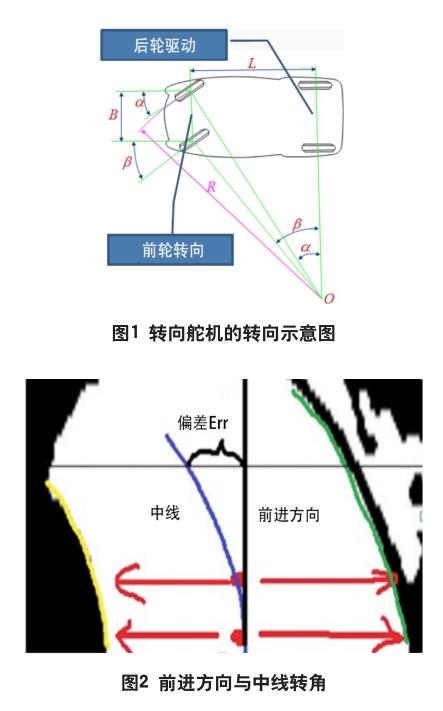
根据阿克曼转角定律: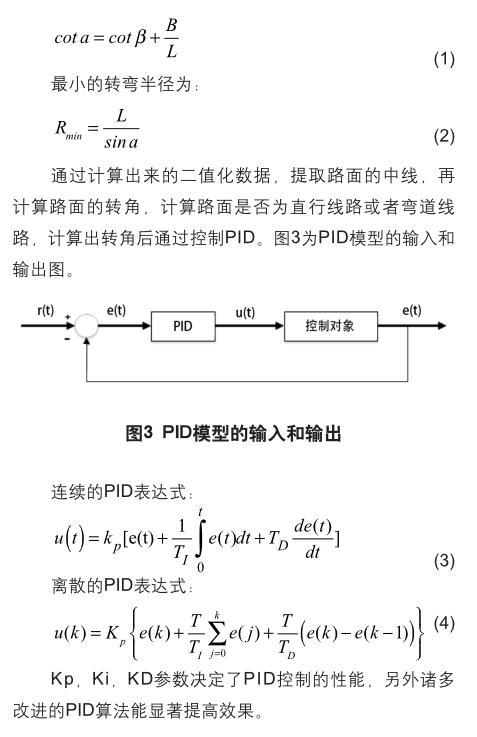
三、实验
本文基于灰度传感器设计基于摄像头的智能小车寻迹,旨在通过灰度传感器获取路面的图像信息进行小车路径的选择,能够达到实时躲避障碍按规定的路径行驶等目的。在提取过程中由于只需要知道路面的灰度信息即可。既减少控制器处理的负担,又提高了控制器处理的效率。经过测试该方案具有高效率。
四、结束语
本文基于灰度传感器的智能小车巡线系统与设计,结合赛道的特点,对摄像头采集到的数据进行提取、边缘化处理、去噪、二值化以及通过PID控制转向舵机的占空比PWM,来实时控制智能小车的转向。同时也进行了赛道信息图像的分割处理和滤波。通过实验发现该系统所提出的方案是有效的。
猜你喜欢
集装箱化(2021年1期)2021-04-12
少年文艺·我爱写作文(2020年11期)2020-11-23
经理人(2020年9期)2020-10-12
中国信息技术教育(2020年2期)2020-02-02
科技传播(2018年3期)2018-02-09
饮食与健康·下旬刊(2017年12期)2017-12-06
少年文艺·我爱写作文(2016年9期)2016-05-14
初中生之友·中旬刊(2015年10期)2015-11-03
CHIP新电脑(2014年11期)2014-11-12
现代电子技术(2009年6期)2009-05-31
