
基于EMCCD相机的全天时大气相干长度测量系统
2018-03-09 07:28佟首峰
激光与红外 2018年2期
张 雷,佟首峰,赵 馨
(1.长春理工大学光电工程学院,吉林 长春 130022;2.长春理工大学 空地激光通信技术国防重点学科实验室,吉林 长春 130022; 3.长春理工大学电子信息工程学院,吉林 长春 130022)
1 引 言
作为一种长期连续监测大气湍流变化的测试设备,大气相干长度测量系统的昼夜观测环境有很大的差别,白天的天空背景辐射影响远大于夜间。传统的测量系统在夜间工作时以恒星(例如北极星)为观测目标,白天时段则通过遮光罩与滤光片组的辅助,将太阳边缘作为观测目标。这种方法可以实现高信噪比观测,不过昼夜交替时,相较目标星而言,天空背景光强度仍很大,这会给目标恒星光斑的提取带来很大难度;此时,若太阳运动到地平线以下,则会进一步导致观测目标的缺失。根据以往研究经验,晨昏时大气湍流强度恰处于峰值转换阶段,是研究湍流强度特性的关键期。因此系统需实现持续稳定的观测。为实现这个目的,本文提出一种以恒星为目标的全天时测量方法,选用红光波段量子效率远高于传统CCD的EMCCD相机作为光电探测器,配合有效的光谱滤波和图像处理技术在白天强天空背景光影响下对恒星目标光斑提取,实现对整层大气相干长度的全天不间断测量。
长期以来,CCD或CMOS相机是大气相干长度测试设备常用的光电探测组件,而近年来一些新型传感器逐步进入实际应用阶段,其中就包括EMCCD相机。EMCCD(电子倍增电荷耦合器件)与普通 CCD的区别是在串行读出寄存器后增加了一系列的“增益寄存器”,使电子在转移过程中多次产生“撞击离子化”效应[1-2]产生大量新的电子,信号电荷在进入读出放大器前就进行了倍增放大,灵敏度得以大幅提高,其电子倍增增益一般可达 1000倍左右,因此在同样的积分时间内,EMCCD 的灵敏度和动态范围远高于普通 CCD,更加适用于白天观星。
2 系统工作原理与组成
全天时大气相干长度测试系统主要由光学接收单元、光电转换单元以及图像处理单元三部分组成。考虑到长期野外实验条件的限制,系统光路采用透射式结构设计,整个系统由双口径开普勒望远系统、平面反射镜、可插拔的滤光片组与衰减片组、准直镜、光楔、成像镜、EMCCD相机、导星转台及主控计算机等部分构成[3],图1为系统光学结构示意图。
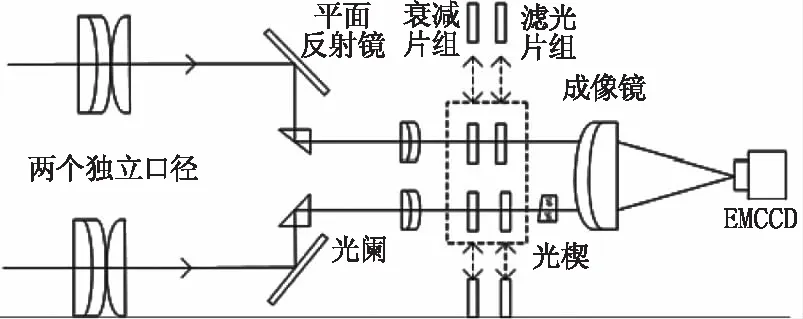
图1 透射式光学系统结构示意图
从图1中可以看出,两个独立口径的透镜组形成了差分像运动测量所需要的子光瞳,光路中放置光楔,从而使同一目标星光经过两子瞳后产生不重叠的双像。在有大气湍流的情况下,由于两子瞳的湍流状况不同,通过记录和统计两像点相对位置变化的方差,可以反演出大气相干长度r0,其具体公式为:
(1)
(2)

(3)
当目标星的天顶距为γ时,归算至天顶的相干长度参数可表示为:
(4)
在使用上述公式过程中,为了确保经过两子瞳的光束波前倾斜相互独立,必须满足如下关系:
d≥2D
(5)
整个测量系统全天时工作示意图如图2所示。

图2 全天时大气相干长度测量系统工作示意图
3 探测信噪比与极限星等分析
3.1 光谱滤光片中心波长的选取
白天观测恒星目标时,通常选择星等较高、长波辐射较强的恒星,这是因为白天天空背景辐射光谱特性向短波漂移,峰值波长在485~495 nm之间,其辐射强度随波长增加而迅速降低,在光学系统中加入短波光谱滤光片可以有效地抑制背景光影响,有利于目标星光斑的采集。显然,光谱滤光片的中心波长选取范围应尽量偏向于红光波段,不过传统CCD在600~700 nm波段的效率仅为20%~30%,而 EMCCD相机(以Andor公司的iXon_888为例)在700 nm波长附近响应效率仍然可以保持在90%左右,因此光谱滤光片的中心波长可定为700 nm,考虑到长焦透射系统的像差校正能力和系统观星信噪比的要求,确定滤光片光谱透过范围为650 nm~750 nm。
3.2 EMCCD相机探测能力分析
3.2.1 EMCCD相机主要噪声分析[4]
噪声是衡量光电探测器性能的重要指标之一。与传统的CCD相机类似,EMCCD相机主要噪声是散弹噪声σshot、暗电流噪声σdark和读出噪声σreadout,同时由于EMCCD自身的倍增机制还会受到电子倍增等附加噪声影响。EMCCD相机在观星时的噪声为:
(6)
1)σshot为入射光子的散弹噪声,由于光的量子特性,这部分噪声是无法避免的,该噪声的大小是由相机接收到的入射星光光子数S和背景光光子数B共同决定的,并经过电子倍增结构G倍增益。其表达式为:
(7)
2)σdark是载流子的热运动噪声,受驱动脉冲影响在输出端形成电流所产生的。CCD类传感器都会存在暗电流噪声,直接影响着这类器件的灵敏度和动态范围。暗电流噪声的大小与工作温度密切相关,温度每升高6 ℃,暗电流噪声会增加约3 dB。其表达式为:
(8)
式中,D为某个温度条件下,每个像元单位时间内产生的暗电流电子数;t为曝光时间。对于EMCCD相机来说,暗电流噪声会随着信号倍增而同样倍增放大,使之成为了限制探测器灵敏度的一个主要因素,系统所选用的Andor公司的iXon_888 EMCCD相机采用了TEC制冷方式,利用风冷或水冷方法保证环境温度为20 ℃时,将器件长时间稳定制冷在-80 ℃左右,此时探测器的暗电流噪声只有约0.001e-/pixel/sec。
3)σreadout为读出噪声来源于读出放大器,主要包括放大器复位噪声、电荷经过放大器的热噪声和1/f噪声等。当输出频率较高时,读出噪声是传统CCD探测器最主要的噪声来源,而EMCCD相机在电荷信号转化成视频信号之前就进行了电子倍增,极大地减小了读出噪声的影响。

3.2.2 信噪比(SNR)分析
白天观星如果想要获得高质量星光光斑图像,则需尽可能提高探测器接收信噪比。假设探测器单位像元接收到的星光信号光子数为S,接收到的背景光光子数为B,可以得到EMCCD的信噪比如下:
(9)
代入公式(7)、(8)并化简,得:
(10)
由上式可见,EMCCD相机自身的电子倍增增益特性可有效抑制读出噪声,暗电流噪声和光子散弹噪声始终伴随着电子倍增噪声的影响。
3.2.3 白天可探测极限星等分析
通过对EMCCD噪声特性分析可知,系统白天观星时,天空背景光远强于目标星光,其所产生的光子散弹噪声也远远大于系统暗电流噪声和读出噪声。因此成像系统白天总噪声可近似表示为:
(11)

设白天所观测的恒星星等为M,目标信号可表示为:
(12)
式中,N为星光光斑弥散的像元数,为保证质心计算的精度,必须满足N≥4[6];Ta为大气透过率,设为0.4;φ0为经光谱滤光片滤波后0等星的光子流密度,约为1.1×104photon/mm2·s[7]。在判定CCD器件探测极限时,通常认为探测器探测到的信号要大于或等于噪声的5倍,则EMCCD可探测的极限星等如下所示:
(13)
将式(12)、(13)代入式(14)得:
(14)
由上式(14)可知,对积分时间t和视场角Ω进行优化选取,可以有效提高使系统的探测极限星等M。其中,积分时间超过一定值时会使EMCCD接收的光子数超过其额定阱深(iXon_888像元阱深为80000 e-),造成探测器饱和,为了避免这一情况,可将t设为10 ms;由于目标星光属于平行光,光学系统视场角的大小只影响入射背景光的强弱,而与信号光强度无关,因此应尽量减小Ω的值。在参考所测大气相干长度范围以及保证导星转台跟踪精度的前提下,可设系统视场角为1°×1°。将所有参量代入公式(14),得系统白天可探测极限星等约为7.35。
4 天空背景下星光目标实时检测
传统大气相干长度测试装置无论是夜间观星还是白天观测太阳边缘,所得到的图像目标与背景对比度都很高,可以直接利用阈值分割法进行光斑提取。白天观星时,天空背景相对较强且分布不均匀,局部图像灰度信息接近或超过星光光斑灰度值,严重降低探测信噪比,造成目标提取失败。因此需要首先采用合适的图像预处理方法抑制背景光,再输出光斑质心,以提高白天强背景光条件下大气相干长度测试精度。全天时大气相干长度测试系统光斑检测流程如图3所示。

图3 星光图像检测流程图
常用的图像预处理方法包括灰度线性拉伸、形态滤波、神经网络等方法。考虑到大气相干长度测量的特点,本系统采用经典中值滤波方法,既能降低噪声影响,又能维持图像细节不变。
完成背景滤波后,需要根据一定准则确定背景阈值的灰度值大小T,在阈值分割的时候将灰度值小于等于T的部分作为背景,而灰度值大于T的部分作为目标。由于信号光斑边缘灰度值变化是一个渐变的过程,为了选定一个较为适中的阈值,可以选择边缘统计法[8]进行统计,求出图像边缘灰度值的均值Gavg和均方差值σ,则阈值T可表示为:
T=Gavg+k·σ
(15)
式中,k为置信因子,设背景符合高斯分布,取k=2.6则代表阈值T包含了99.5%以上的背景。
根据以上方法计算出背景阈值,然后采用区域生长法找出图像中灰度值大于背景阈值的连通区域。其基本思想是以光斑图像中灰度值最大的像元作为初始种子,搜索并标记种子周围大于背景阈值的点,认为此点与种子属于同一连通区域,将此点灰度值归零后,按此方法继续搜索直到找不到灰度值大于背景阈值的点为止,此为连通区域1,区域内的点灰度值都已归零;然后找出图像中下一个灰度值最大的像元作为2号种子,重复上述步骤建立连通区域2…依次进行n次搜索,建立n个连通区域,这n个连通区域中像元数量最多的两个即为光斑区域。通过连通性分析消除图像虚假目标之后,采用质心算法提取质心位置。
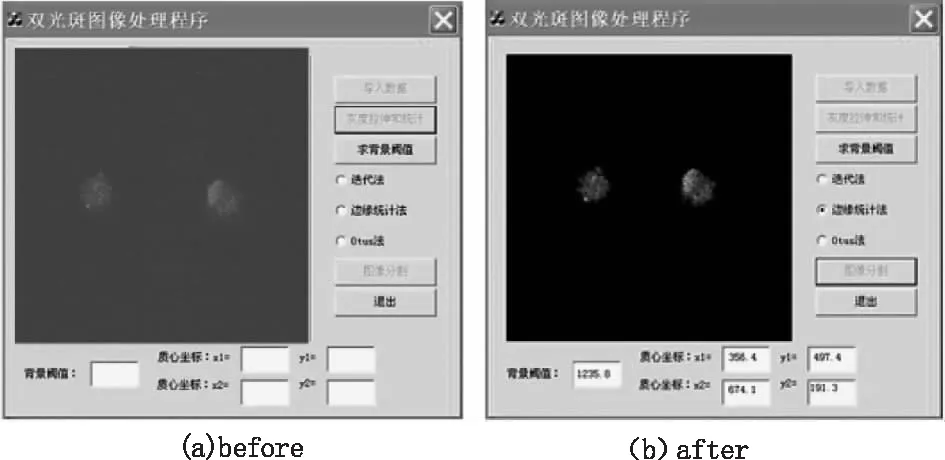
图4 图像预处理结果
5 观星实验
为了验证大气相干长度测量系统全天时工作能力,选择晴朗上午在长春市净月潭国家森林公园西山进行观星实验,观测地点海拔268.4 m,东经125°25′,北纬43°46′,太阳高度角45°。实验使用子孔径80 mm、子瞳间距200 mm的透射式光学系统,加装650~750 nm波段带通滤光片,EMCCD相机分辨率1024×1024,积分时间10 ms,增益260,目标光斑弥散大小约为10×10个像元。
由于受大气透过率、地面杂散光以及观测目标星光谱特性的影响,实际野外测量活动中,目标信噪比远远低于理论值,即使经过图像预处理,符合观测要求的实际星等也明显高于理论极限探测星等。通过表1所列北方天空小熊星座所属几颗不同星等的恒星白天实拍灰度值与所对应信噪比可知,星等较高的北极星(小熊座α)和小熊座γ都可以作为全天时连续观测大气相干长度的目标星。
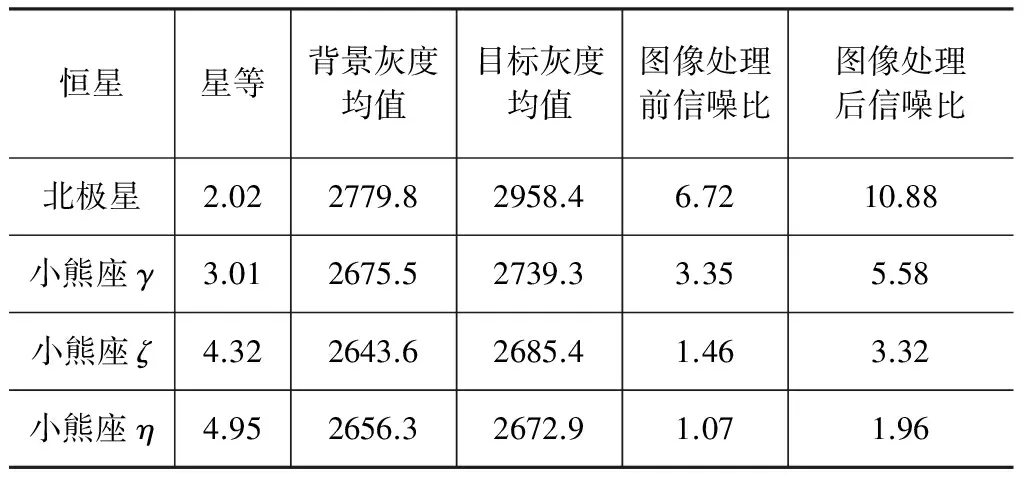
表1 白天不同星等目标实拍灰度值
为了检验系统白天对r0的测量能力,实验小组选择目视星等低于北极星的小熊座γ星(3等星)为目标,进行连续24 h的观测。为避免观测天顶角角度不同所引起的大气湍流强度测量误差,可将不同仰角的r0测量值均以天顶角为0°进行反演,图5为反演后得到整层大气相干长度r0随时间变化的曲线。由图可知,长春地区夜间大气湍流强度较弱,后半夜优于前半夜;上午大气湍流开始逐渐增强,并在中午时段达到峰值,此时r0为4 cm;而后持续减弱,并在黄昏时段达到最小值。可以看出大气湍流强度具有显著的时刻转换特征;观测曲线基本符合近地面大气湍流强度随时间变化的经验规律[9]。

图5 整层大气相干长度随时间变化曲线
6 结 论
白天强背景光条件下,高探测信噪比是大气相干长度测量系统正常工作保障。EMCCD相机在红光波段具有较高的量子效率,配合合适的光谱滤光片,可使中心波长向红光区大范围偏移,极大地减小了背景光辐射的入射强度,提高了入射星光信号与背景光的对比度。由文中对系统成像时噪声分析可知,EMCCD相机利用电子倍增的增益方式可有效地减少读出噪声对成像质量的影响;同时采取TEC制冷技术将暗电流噪声降低到一个极小值;虽然引入了电子倍增噪声因子,但对系统整体信噪比影响不大。通过在野外环境对小熊座γ星的24 h连续测量,得到了长春地区整层大气相干长度随时间变化曲线,不仅有效地证明了该全天时大气相干长度测量系统的实用性,也反映出EMCCD相机相对于传统CCD相机在白天观星能力上的优势。
目前,EMCCD相机在大气相干长度测量系统刚刚开始初步应用,有针对性的应用控制软件开发还不成熟。实际上,全天时大气相干长度测量系统作为一种大气参数长期监测设备,工作时常会遇到薄云遮挡致星光变暗、阴天背景光峰值波长向红光区移动、太阳规避角过小致局部背景光饱和等情况,这会造成测量数据出现粗大误差甚至测试中断。如果能将EMCCD相机的ROI(region of interesting)技术、自动增益设置、自适应积分调节等功能充分整合利用起来,进一步挖掘EMCCD相机的探测潜力,应该能为解决这一类问题提供有效的途径。相信随着导星跟踪技术的发展及软件算法的改善,探测灵敏度高、噪声小的EMCCD相机在大气湍流参数测量领域中会有更广阔的应用空间。
[1] SU Xuezheng.EMCCD technology-tingle photon imaging detection[J].Modern Scientific Instruments,2005,(2):51-53.(in Chinese)
苏学征.EMCCD技术-单光子水平的成像探测[J].现代科学仪器,2005,(2):51-53.
[2] LU Jiali,LI Binhua,HU Po.A method of determining EMCCD electron multiplication gain[J].Acta Armamentarii,2015,36(4):710-715(in Chinese)
卢家莉,李彬华,胡泊.一种电子倍增CCD电子倍增增益的确定方法[J].兵工学报,2015,36(4):710-715.
[3] XIANG E,LU Xiaomeng,JIANG Xiaojun.Lucky imaging system on the 50 cm telescope at Xinglong observatory[J].Infrared and Laser Engineering,2015,44(4):1278-1283.(in Chinese)
向娥,卢晓猛,姜晓军.基于兴隆观测基地 50 cm 望远镜的幸运成像系统[J].红外与激光工程,2015,44(4):1278-1283.
[4] HE Jiawei, HE Xin,WEI Zhonghui,et al.Design and application of EMCCD camera for full-time star sensor[J].Infrared Technology,2013,35(11):718-722.(in Chinese)
何家维,何昕,魏仲慧,等.EMCCD 相机在全天时星敏感器中的设计与应用[J].红外技术,2013,35(11):718-722.
[5] Kurt L,Brain D,Alexander C,et al.Daytime aspect camera for balloon altit-udes[J].Opt Eng,2002,41(10):2641-2651.
[6] WAN Min, SU Yi,YANG Rui,et al.Improvement of signal to noise ratio in astronomical objects detection in daytime[J].High Power Laser and Particle Beams,2003,15(2):1151-1154.(in Chinese)
万敏,苏毅,杨锐,等.提高白天观测星体信噪比的方法研究[J].强激光与粒子束,2003,15(2):1151-1154.
[7] LIEBEC C.Accuracy performance of star trackers-atutorial[J].IEEE,2002,38(2):587-599.
[8] GAO Yang,ZHANG Ke,LI Yanjun.Edge det-ection investigation of low-SNR infrared image based on noise probability[J].Infrared and Laser Engineering,2005,34(4):459-463.(in Chinese)
高阳,张科,李言俊.低信噪比红外图像的快速统计法边缘提取[J].红外与激光工程,2005,34(4):459-463.
[9] CHEN Xiaowei,SUN Gang,LIU Qing,et al.Contribution of the surface layer to the integral turbulence in Northwest Plateau[J].Acta Optica Sinica,2015,35(11):1101006.(in Chinese)
陈晓威,孙刚,刘庆,等.近地面湍流对整层湍流的贡献及相关研究[J].光学学报,2015,35(11):1101006.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代仪器与医疗(2022年1期)2022-04-19
天津医科大学学报(2021年1期)2021-01-26
阅读(高年级)(2019年9期)2019-11-15
北京航空航天大学学报(2019年9期)2019-10-26
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
雷达学报(2017年3期)2018-01-19
自动化学报(2017年5期)2017-05-14
雷达与对抗(2015年3期)2015-12-09
