基于无人机遥感影像的水稻种植信息提取
2018-03-09 05:26黄愉淇李绪孟彭冬星谢景鑫
农业工程学报 2018年4期
李 明,黄愉淇,李绪孟,彭冬星,谢景鑫
基于无人机遥感影像的水稻种植信息提取
李 明1,3,黄愉淇1,李绪孟2,彭冬星1,谢景鑫1
(1. 湖南农业大学工学院,长沙 410128; 2. 湖南农业大学理学院,长沙 410128; 3. 湖南星索尔航空科技有限公司,长沙 410100)
水稻是中国南方最主要的粮食作物,种植面积波动对国家粮食稳定有很大影响。通过无人机遥感试验获取多幅有重叠区域的图像,使用Agisoft photoscan软件拼接重构试验区的完整图像,利用多尺度分割方法将试验区域分割成若干对象,并基于统计方法提取对象的光谱特征、几何特征和纹理特征;然后,建立识别水稻地块的二分类Logistic回归模型,特征指标为形状指数、红色均值、红色标准偏差、最大化差异度量、灰度共生矩阵同质性和灰度共生矩阵非相似性。结果表明:模型辨识训练样本集的正确率为100%,辨识检验样本的正确率为97%,模型应用于辨识验证区域水稻田块,总体正确率为98%。最后基于累计像素方法测算水稻田块的面积,并与目视解译测算的结果对比,面积误差小于3.5%,研究方法识别水稻田块效果好,面积测算准确率高。因此,该研究对利用无人机遥感影像普查水稻种植信息具有一定的适用性。
无人机;遥感;农作物;可见光;水稻;二分类
0 引 言
中国是拥有13亿人口的大国,粮食问题是关系国计民生的大事,在国民经济和社会发展中占有极其重要的地位[1]。随着中国城镇化、工业化的推进,耕地面积下降,并且种植作物呈多元化发展趋势[2]。水稻是中国南方最主要的粮食作物[3],及时掌握其种植信息,对维护国家的粮食稳定及制定相关政策有着巨大意义。
遥感技术[4],具备获取信息丰富、多分辨率和多平台、快速和覆盖范围广的优势,被广泛用于农情信息获取[5-9]。随着飞行技术的发展,具有机动灵活、作业选择性强、作业周期短、时效性好、维护使用费低、安全性好的无人机平台近年来逐渐趋于成熟[10-11]。随着微型计算机、通讯设备等技术迅速发展,搭载遥感设备的无人机平台成为近年获取作物种植信息研究的热点[12-13]。
前人利用无人机平台获取可见光图像提取物种植信息的研究取得了一定的进展,就其方法而言,大致分为两类:基于像元的提取方法和基于面向对象分类技术的提取方法。在基于像元提取方法的研究方面,汪小钦等[14]基于可见光无人机遥感的RGB图像,利用植被在绿光波段的反射及在红光和蓝光波段的吸收特性,构建了植被指数VDVI(可见光波段差异植被指数);李宗南等[15]基于小型电动无人机搭载彩色数码相机获取的彩色图像,分别通过色彩特征和纹理特征区分正常、倒伏玉米,发现基于红、绿、蓝色均值纹理特征提取倒伏玉米面积的误差小;韩文霆等[16]基于固定翼无人机获取RGB图像,研究拔节期玉米种植信息提取方法,绿色均值、蓝色协同性和纹理低通植被指数TLVI作为玉米种植信息提取特征,面积提取误差总体可以控制在20%以内;Kyle等[17]基于DJI多旋翼无人机获取的多幅RGB图像,使用自适应余弦估计器和谱角映射器算法完成藻类识别;Carlos Poblete-Echeverría等[18]基于无人机遥感捕捉具有超高空间分辨率的图像,比较-均值、人工神经网络、随机森林和光谱指数在VSP训练的葡萄园中的冠层检测性能。在基于面向对象分类技术的提取方法的研究方面,王利民等[19]基于无人机获取RGB影像,利用光谱特征、几何形状特征、纹理特征,采用面向对象分类方法对苜蓿、春玉米、夏玉米和裸土进行分类;董梅等[20]基于无人机遥感影像技术,以面向对象的遥感影像分析方法提取烟草种植面积及其分布信息;鲁恒等[21]基于无人机影像技术,提出利用迁移学习机制的耕地提取方法。
水稻是中国南方最主要的粮食作物,然而,目前国内还没有利用无人机平台获取水稻种植信息的研究,为此,本文研究将一种基于无人机搭载可见光遥感设备获取的数字影像研究提取水稻种植信息的方法,为水稻种植信息普查提供方法补充。
1 数据来源
1.1 研究区概况
研究区域分为试验区和验证区,分别位于湖南省中部新化县土坪村和湖南省长沙市省农业科学院水稻研究所水稻试验展示基地,地处中纬度地带(110°45′-111°41′E,27°31′-28°14′N)和(111°53′-114°15′E,27°51′-28°41′N),属亚热带季风性湿润气候,气候温和,降水充沛,雨热同期,四季分明[22],土地平坦且肥沃,热量资源丰富,光照充足,适合水稻的种植生产,早稻的生长期为3月到7月[23]。测区条件交通条件便利、田块多且地势相对平整,为遥感影像分类提取提供便利,同时对作物的地面生长情况监控充足,各种作物资料获取方便,为无人机遥感影像的农情监测应用研究提供了可靠的保障。试验区测区面积大约为6 km×2 km;验证区测区面积大约为0.8 km×0.6 km。
1.2 数据获取
研究的数据来源于2017年6月在试验区和2017年7月在验证区进行的无人机遥感试验。无人机平台采用星索尔航空科技有限公司的六旋翼无人机,最大飞行速度为6 m/s,轴距1 300 mm,起重限额10 kg,最大续航时间50 min。其搭载的相机影像传感器为CMOS,镜头搭载的为FOV94,对焦点无穷远,单幅照片最大像素4 000× 3 000 pixel。试验区设计飞行航高120 m,航线20条,航线总长30 km,航拍获取了试验田地及附近地区374张航片。验证区设计飞行航高60 m,航线10条,航线总长8 km,航拍获取了试验田地及附近地区140张航片。
1.3 数据处理
航空影像通过Agisoft PhotoScan软件进行影像拼接,整个工作流程由软件自动完成。试验区和验证区正射影像图如图1所示。

图1 试验区和验证区正射影像图
首先Agisoft PhotoScan利用 POS数据通过寻找同名点的方法完成数据定向及点云提取,然后通过地面控制点数据进行点云数据的几何校正及地理信息配准,最终经过立体建模、生成纹理,获取符合《数字航空摄影测量空中三角测量规范》中对1:1000 0平地平面精度要求的图像[24]。由软件导出正射影像图,以JPEG图像格式储存。图像的空间分辨率为0.04和0.02 m,图像位深度为24,色彩空间为sRGB;该图像存储了地物红、绿、蓝3种色彩的灰度值,每种色彩含8位字节的信息,数值范围为0~255。
2 基于面向对象分类法的水稻种植面积提取方法
研究使用的JPEG图像只具有红、绿、蓝3色的灰度信息,仅仅使用基于单个像元的光谱信息对地物进行分离,造成分类精度不高,而且分类结果易呈现“椒盐”现象,对遥感影像的应用带来不利影响[25]。通过面向对象分类方法,不再仅仅依靠单一像素的光谱信息,而是针对影像对象单元集合,充分利用光谱信息、几何特征、纹理特征和上下文等属性信息,遥感影像信息的提取得到明显的改善,对分类及面积提取的精度得到提高[26-27]。因此研究首先对JPEG图像进行对象分割,然后针对影像的对象分割单元提取多空间特征值进行处理分析与统计,建立多特征对象的分类体系。数据处理软件使用eCognition Developer 9,分割算法采用图像多尺度分割,分类算法采用指定类分类。
2.1 图像的分割参数的选择
多尺度分割是较为常用的分割算法,分割尺度、光滑度和紧密度等参数的选择直接决定影像对象的大小以及信息提取的精度。利用eCognition软件,结合影像数据实际地物特征,通过多次试验,最终选取具体的影像分割参数。试验区的尺度参数Scale=480,形状因子Shape=0.1,紧凑度因子Compact=0.1。分割后共880个对象,其中水稻地块173块,其他地块707块。验证区的尺度参数Scale=1 500,形状因子Shape=0.1,紧凑度因子Compact=0.3,分割后得到共240个分割对象,水稻地块17块,其他地块223块。目视检验表明分割效果较好,图2为试验区与验证区多尺度分割结果。
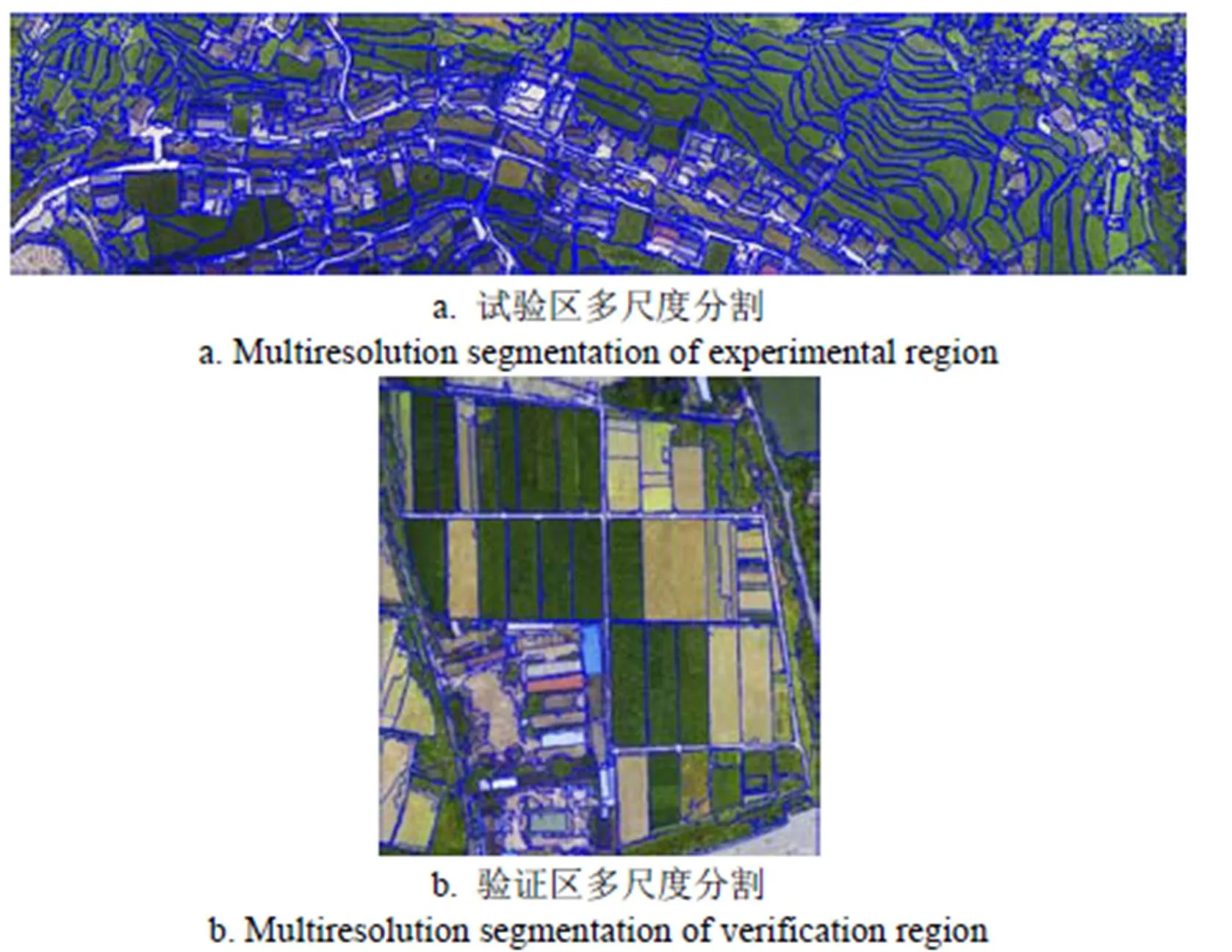
图2 试验区和验证区多尺度分割
2.2 试验区特征统计分析
使用eCognition Developer 9统计对象特征值。试验区域影像中173个水稻田块、707个其他地块的亮度、红色均值、绿色均值、蓝色均值、最大化差异度量、红色标准偏差等32项特征参数的最大值和最小值见表1。分析表1发现,两类对象的所有特征值都有交集,使用单一特征辨别水稻地块是不可行的,因此将利用多个特征组合对水稻地块进行区分。
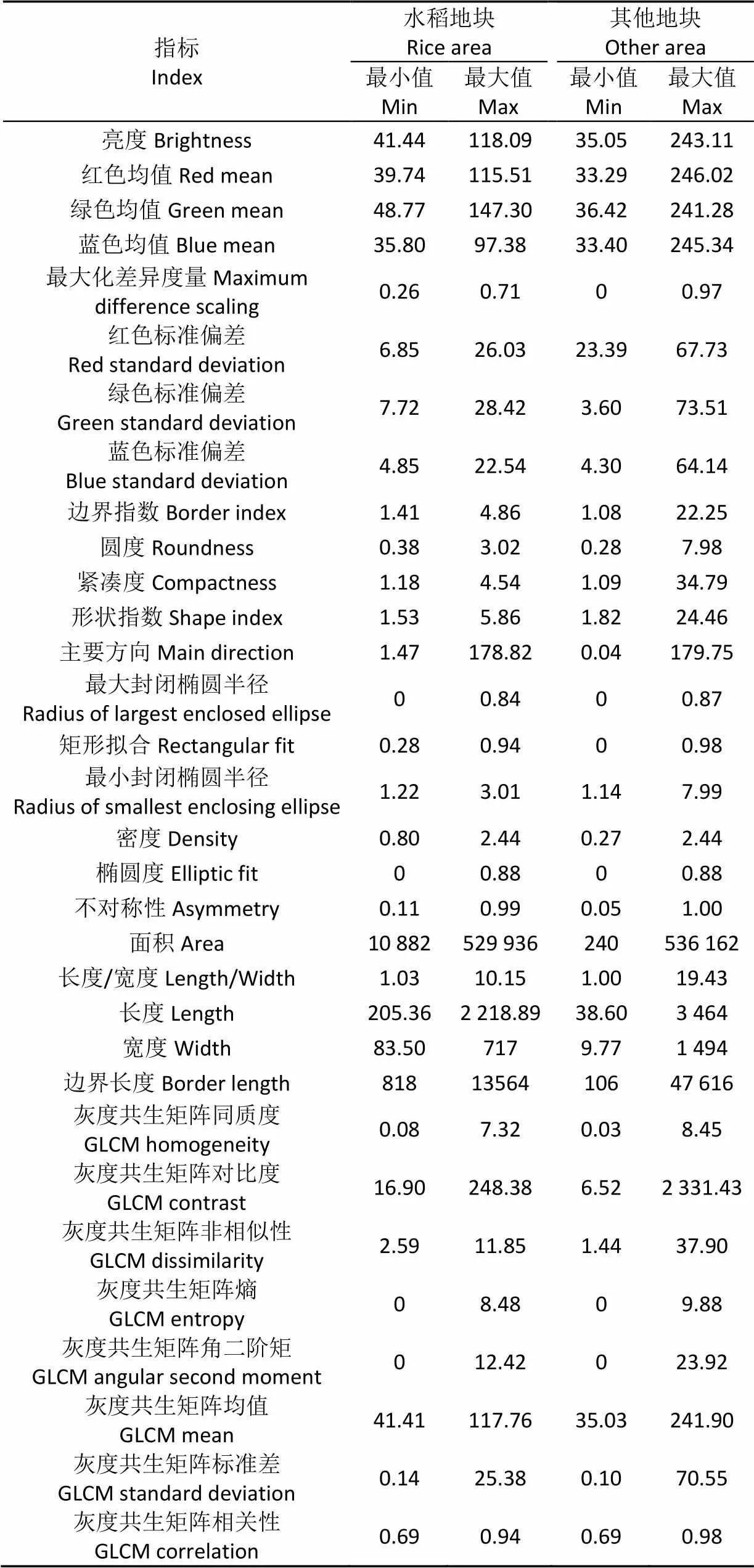
表1 水稻地块与其他地块的特征值
2.3 辨识模型构建与检验
2.3.1 二分类Logistic回归模型
在统计分析上,Logistic回归应用非常广泛。其中Binary logistic回归分析因变量为0和1。为试验方便,把水稻地块标记为1,水稻地块以外的其他地块标记为0。采用Logistic模型,将因变量的范围锁定在[0,1]范围内,记发生的条件概率为,把的某个函数()假设为变量的函数形式,进行logit变换。
Logistic线性回归模型[28-29]为
将式(2)对求解得到

式中0,1,2,…,α为回归系数;1,2,3,…,X为线性回归自变量。
2.3.2 二分类Logistic辨识模型的构建
将试验区的对象分成两份,随机选取水稻地块87块和其他地块354块作为训练样本,用于二分类Logistic回归模型的构建。使用SPSS的条件向前逐步法构建二分类Logistic回归模型,在处理过程中,所有变量依据比分检验的概率大小依次进入方程,并依据条件参数似然比进行检验剔除变量。回归系数α见表2,训练样本的分类结果见表3。

表2 模型参数估计结果
表3表明:正确分类水稻地块数为87,正确分类其他地块数为354,正确率均为100%。具体的二分类Logistic回归模型为

式中1,2,3,4,5,6分别代表对象的形状指数、红色均值、红色标准偏差和最大化差异度量、灰度共生矩阵对比度和灰度共生矩阵非相似性的值。
2.3.3 对象分类的Holdout检验
Holdout检验是将随机剔除掉的样本进行检验[30]。利用全部对象检验构建的二分类Logistic回归模型和对象分类特征。检验结果表明:构建的二分类Logistic回归模型辨识检验样本的正确率为100%,见表3,基于二分类Logistic分类算法水稻的提取结果见图3。

表3 基于二分类Logistic分类算法的试验区分类结果
注: 1表示水稻地块,0表示非水稻地块。余同
Note: 1 is defined as rice area, 0 is defined as other area. The same as below.

注:绿色图块为提取的水稻地块。余同
2.4 基于二分类Logistic分类算法提取水稻地块的验证
为进一步检验方法的可行性,从验证区的240个对象中随机选取总对象的约1/2,即水稻地块8块,其他地块101块,作为训练样本,其余为检验样本,训练样本用于构建二分类Logistic回归模型,重新确定式(4)中形状指数、红色均值、红色标准偏差和最大化差异度量、灰度共生矩阵对比度和灰度共生矩阵非相似性特征6个变量的系数,然后利用重新构建的二分类Logistic回归模型辨识检验样本。
结果表明,训练样本正确分类水稻地块数为8,正确率为100%,正确分类其他地块数为101,正确率为100%,总体正确率为100%;验证样本正确分类水稻地块数为8,正确率为89%,正确分类其他地块数为122,正确率为100%,总体正确率为99%(表4)。基于二分类分类算法验证区域提取结果见图4。通过观察该区域观察值为1而预测值为0的地块,发现产生误判的原因是该田块在该时期生长还未封行,光谱信息上与其他的水稻地块差异大。
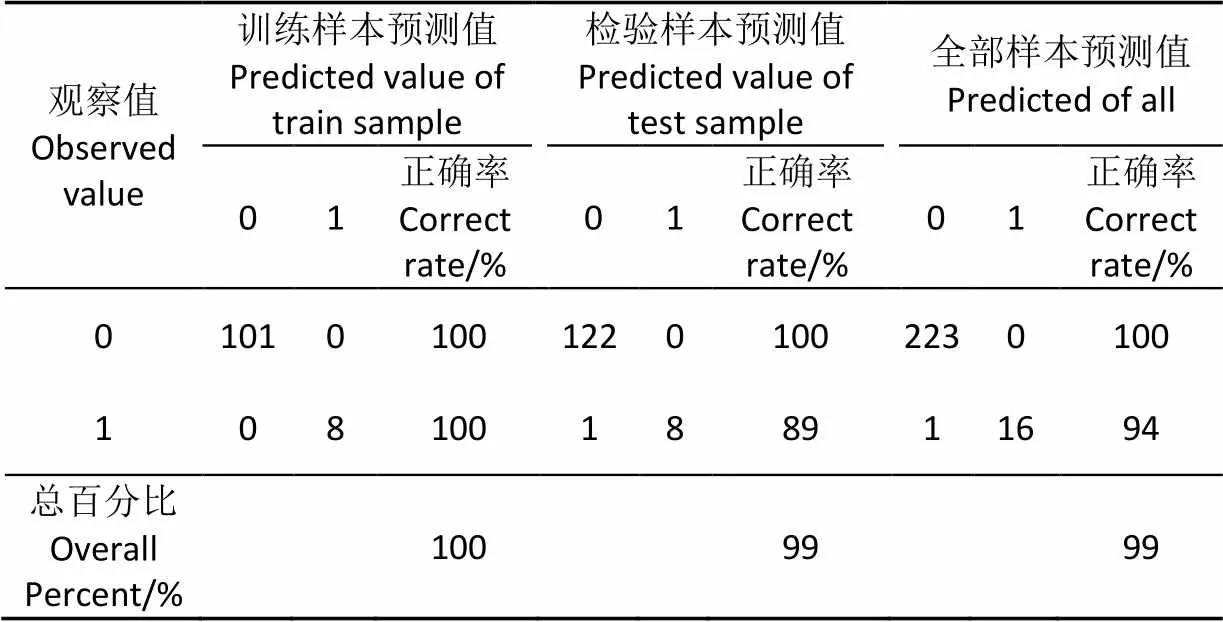
表4 基于二分类Logistic分类算法的验证区分类结果

图4 基于二分类Logistic分类算法验证区域提取结果
3 水稻种植面积提取精度验证
使用目视解译获得水稻种植面积的实测值,根据地面调查数据和观察试验区域图像中水稻的特征,以田埂为边界,用钢笔工具勾画出试验区域和验证区域图像所有水稻地块,水稻种植面积的目视解译提取结果见图5,绿色为水稻地块。
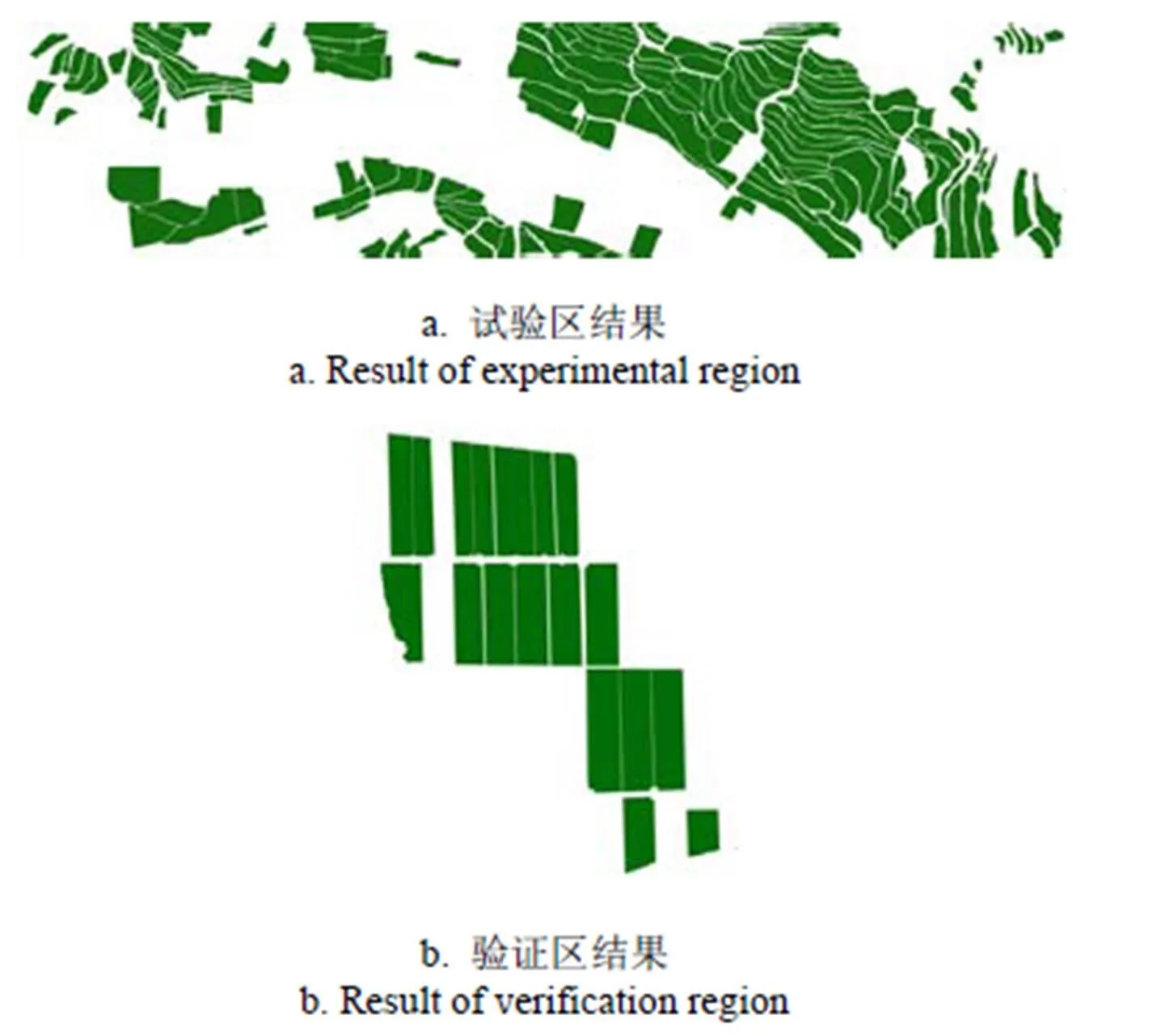
图5 目视解译提取结果
对比图3和图5a、图4和图5b发现提取出的水稻地块在试验区域图像中分布位置基本相同,说明基于二分类Logistic回归模型的分类算法能够较准确定位水稻种植地块的分布。基于累计像素点方法分别统计目视解译和基于二分类类分类算法方法提取结果的水稻地块的面积,并以目视解译结果为基于二分类Logistic算法进行精度评价,精度表见表5,试验区与验证区的误差分别为0.20%和3.5%。

表5 水稻地块提取面积精度
4 讨 论
本文试验区和验证区地物主要包括水稻、树体、草地、裸地、水体和建筑。红色均值是区分植被覆盖对象(水稻、草地、树体)与非植被覆盖对象(裸地、水体、建筑)颜色信息;红色标准偏差和最大化差异度量刻画水稻和草地的颜色变化差异,水稻地块的颜色相对均匀,杂草地缺乏管理,长势不均,颜色变化相对较大;水稻地块和树体颜色变化都较小,但是树体的边界较破碎,其形状指数较大,形状指数能有效区分颜色均值接近且变化较小的水稻地块和树体;纹理特征体现地物表面缓慢变化或者周期性变化的结构组织排列属性[31],水稻、树体、草地、裸地、水体和建筑均存在一定差异,是从地物中区分水稻地块的补充属性。机理分析上看6个特征指标区分试验区和验证区地物是合理的。
6个特征指标基于试验区确定,同时适合于不同地域,不同生长期的验证区水稻地块的辨识,验证区的辨识正确率99%。试验结果表明,红色均值、红色标准偏差和最大化差异度量,形状指数,灰度共生矩阵对比度和灰度共生矩阵非相似性六个特征指标能有效辨识水稻地块。
5 结 论
1)基于对象的32项特征统计,运用二分类Logistic回归模型确定了水稻地块提取的6个特征指标,其中,光谱特征3个指标,红色均值、红色标准偏差和最大化差异度量,即对象所有像素红色图层的均值、标准差和三种光谱均值的最大的差异,其作用是区分水稻地块对象与其他对象的颜色信息。形状特征1个指标,形状指数,表示对象边界的光滑度,对象边界越破碎,其形状指数越大。纹理特征2个指标,灰度共生矩阵对比度和灰度共生矩阵非相似性,均表示对象局部灰度变化总量,灰度差别越大则对比度的值越大,对比度越高,非相似性度也越大。
2)基于二分类Logistic模型进行地块分类,有效提取了辨识水稻地块的光谱特征、形状特征和纹理特征,能够较准确的辨识水稻地块,辨识正确率高,采用累计像素点方法测量试验区与检验区的面积,以目视解译的面积作为精度评价,误差率分别为0.20%和3.5%。表明利用本文方法对水稻种植情况普查具有一定参考价值。
3)利用本方法辨识水稻田块受水稻生育期的影响,进一步分析发现验证区,与其他水稻田块比较,错误分类的水稻田块水稻生育期差异明显,该田块水稻明显未封行。因此,不同时期调进行多次调查是进一步提高本方法辨识水稻地块正确率的有效途径。
[1] 章秀福,王丹,方福平,等. 中国粮食安全和水稻生产[J]. 农业现代化研究,2005,26(2):85-88. Zhang Xiufu, Wang Dan, Fang Fuping, et al. Food safety and rice production in China[J]. Research of Agricultural Modernization, 2005, 26(2): 85-88. (in Chinese with English abstract)
[2] 李景奇. 中国农业的现状和前景展望[J]. 中国农业信息,2013,17(1):56-58.
[3] 唐华俊. 新形式下中国粮食自给战略[J]. 农业经济问题,2014(2):4-10.
[4] 史舟,梁宗正,杨媛媛,等. 农业遥感研究现状与展望[J]. 农业机械学报,2015,46(2):247-258. Shi Zhou, Liang Zongzheng, Yang Yuanyuan, et al. Status and prospect of agricultural remote sensing[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(2): 247-258. (in Chinese with English abstract)
[5] 李明,赵俊霞,胡芬. 国家航空航天遥感影像获取现状及发展[J]. 测绘通报,2015(10):12-15. Li Ming, Zhao Junxia, Hu Fen. Status and development for acquisition of national aerospace remote sensing imageries[J]. Bulletin of Surveying and Mapping, 2015(10): 12-15. (in Chinese with English abstract)
[6] 宋晓宇,王仁红,杨贵军,等. 高分辨率遥感影像中冬小麦长势空间异质性特征分析[J]. 农业工程学报,2014,30(37):192-199. Song Xiaoyu, Wang Renhong, Yang Guijun, et al. Winter wheat growth spatial variability character analysis based on remote sensing image with high resolution[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(17): 192-199. (in Chinese with English abstract)
[7] Lamb D W. The use of qualitative airborne multispectral imaging for managing agricultural crops: A case study in south-eastern Australia[J]. Australian Journal of Experimental Agriculture, 2000(40): 725-738.
[8] Xiang Haitao, Tian Lei. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV)[J]. Biosystems Engineering, 2011(108): 174-190.
[9] 汪沛,罗锡文,周志艳,等. 基于微小型无人机的遥感信息获取关键技术综述[J]. 农业工程学报,2014,30(18):1-12. Wang Pei, Luo Xiwen, Zhou Zhiyan, et al. Key technology for remote sensing information acquisition based on micro UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(18): 1-12. (in Chinese with English abstract)
[10] 白由路,金继运,杨俐苹,等. 低空遥感技术及其在精准农业中的应用[J].土壤肥料,2004(1):3-6. Bai Youlu, Jin Jiyun, Yang Liping, Technology of low altitude remote sensing and its applications in precision agriculture[J]. Soil and Fertilizer Sciences in China, 2004(1): 3-6. (in Chinese with English abstract)
[11] 高奋生. 低空无人机遥感的应用及发[J].农业网络信息,2014(12):75-78. Gao Fensheng, Application and progress on low-altitude unmanned aerial vehicle remote sensing[J]. Agriculture Network Information, 2014(12): 75-78. (in Chinese with English abstract)
[12] 杨邦杰,裴志远,周清波. 我国农情遥感监测关键技术研究进展[J]. 农业工程学报,2002,18(3):191-194. Yang Bangjie, Pei Zhiyuan, Zhou Qingbo, et al. Key technologies of crop monitoring using remote sensing at a national scale progress and problems[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2002, 18(3): 191-194. (in Chinese with English abstract)
[13] Rango A, Laliberte A, Herrick J E, et al. Unmanned aerial vehicle-based remote sensing for rangeland assessment,, monitoring, and management[J]. Journal of Applied Remote Sensing, 2009, 3(1): 335-342.
[14] 汪小钦,王苗苗,王绍强,等. 基于可见光波段无人机遥感的植被信息提取[J]. 农业工程学报,2015,31(5):152-159. Wang Xiaoqin, Wang Miaomiao, Wang Shaoqiang, et al. Extraction of vegetation information from visible unmanned aerial vehicle images[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(5): 152-159. (in Chinese with English abstract)
[15] 李宗南,陈仲新,王利民,等. 基于小型无人机遥感的玉米倒伏面积提取[J]. 农业工程学报,2014,30(19):207-213. Li Zongnan, Chen Zhongxin, Wang Limin, et al. Area extraction of maize lodging based on remote sensing by small unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(19): 207-213. (in Chinese with English abstract)
[16] 韩文霆,李广,苑梦婵,等. 基于无人机遥感技术的玉米种植信息提取方法研究[J]. 农业机械学报,2017,48(1):140-147. Han Wenting, Li Guang, Yuan Mengchan, et al. Extraction method of maize planting information based on UAV remote sensing techonology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 140-147. (in Chinese with English abstract)
[17] Kyle F F, Steven C C. Remote sensing of submerged aquatic vegetation in a shallow non-turbid river using an unmanned aerial vehicle[J]. Remote Sensing, 2014, 6(12): 12815-12836.
[18] Carlos Poblete-Echeverría, Guillermo Federico Olmedo, Ben Ingram, et al. Detection and segmentation of vine canopy in ultra-high spatial resolution RGB imagery obtained from unmanned aerial vehicle (UAV):A case study in a commercial vineyard[J]. Remote Sensing, 2017, 9(268): 14.
[19] 王利民,刘佳,杨玲波,等. 基于无人机影像的农情遥感监测应用[J]. 农业工程学报,2013,29(18):136-145. Wang Limin, Liu Jia, Yang Lingbo, et al. Applications of unmanned aerial vehicle images on agricultural remote sensing monitoring[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2013, 29(18): 136-145. (in Chinese with English abstract)
[20] 董梅,苏建东,刘广玉,等. 面向对象的无人机遥感影像烟草种植面提取和监测[J]. 测绘科学,2014,39(9):87-90. Dong Mei, Su Jiandong, Liu Guangyu, et al. Extraction of tobacco planting areas from UAV remote sensing imagery by object-oriented classification method[J]. Science of Surveying and Mapping, 2014, 39(9): 87-90. (in Chinese with English abstract)
[21] 鲁恒,付萧,贺一楠,等. 基于迁移学习的无人机影像耕地信息提取方法[J]. 农业机械学报,2015,46(12):274-279,284. Lu Heng, Fu Xiao, He Yinan, et a. Cultivated land information extraction from high resolution UAV images based on transfer learning[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(12): 274-279, 284. (in Chinese with English abstract)
[22] 刘朝阳,刘黎明,彭 倩. 南方双季稻区农户水稻种植模式的决策行为分析:基于湖南省长沙县农户调查的实证研究[J]. 资源科学,2012,34(12):2234-2241. Liu Zhaoyang, Liu Liming, Peng Qian. Analysis of rice cropping decision-making in a double-cropping rice area of southern china[J]. Resources Science, 2012, 34(12): 2234-2241. (in Chinese with English abstract)
[23] 廖中华,周玉梅,刘振之. 新化县水稻“压单扩双”瓶颈及发展对策[J]. 湖南农业科学,2016(7):100-102. Liao Zhonghua, Zhou Yumei, Liu Zhenzhi. Bottleneck and development countermeasures of rice “reduce single and expand double” in xinhua county[J]. Hunan Agricultural Science, 2016(7): 100-102. (in Chinese with English abstract)
[24] 张小宏,赵生良,陈丰田. Agisoft photoscan在无人机航空摄影影像数据处理中的应用[J]. 价值工程,2013(20):230-231. Zhang Xiaohong, Zhao Shengliang, Chen Fengtian. The application of agisoft photoscan in UAV aerial photographic image data processing[J].Value Engineering, 2013(20): 230-231. (in Chinese with English abstract)
[25] 张俊,于庆国,侯家槐. 面向对象的高分辨率影像分类与信息提取[J]. 遥感技术与应用,2010,25(1):112-117. Zhang Jun, Yu Qingguo, Hou Jiahuai. Object-oriented classification and information extraction based on high spatial resolution remote sensing image[J].Remote Sensing Technology and Application, 2010, 25(1): 112-117. (in Chinese with English abstract)
[26] 罗开盛,李仁东,常变蓉. 利用面向对象分类技术的大尺度土地覆被调查方法[J]. 中国科学院大学学报,2013,30(6):770-777. Luo Kaisheng, Li Rendong, Chang Bianrong. Land-cover survey method using object-oriented technology and HJ-CCD image on large scale[J]. Journal of University of Chinese Academy of Sciences, 2013, 30(6): 770-777. (in Chinese with English abstract)
[27] 郭琳,裴志远,吴全,等. 面向对象的土地利用/覆盖遥感分类方法与流程应用[J]. 农业工程学报,2010,26(7):194-198. Guo Lin, Pei Zhiyuan, Wu Quan, et al. Application of method and process of object-oriented land use-cover classification using remote sensing images[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2010, 26(7): 194-198. (in Chinese with English abstract)
[28] 杜谦,范文,李凯,等.二元Logistic回归和信息量模型在地质灾害分区中的应用[J]. 灾害学,2017,32(2):220-226. Du Qian, Fan Wen, Li Kai, et al. Geohazard susceptibility assessment by using binary logical regression and Information value model[J]. Journal of Catastrophology, 2017, 32(2): 220-226. (in Chinese with English abstract)
[29] 万婷,蒲春玲,刘志有.农户耕地利用影响因素二元Logistic回归模型分析:以新疆阿瓦提县为例[J]. 新疆农业科学,2012,49(7):1366-1370. Wan Ting, Pu Chunling, Liu Zhiyou. Analysis of influence factors of farmers’ cultivated land use by binary logistic regression mode: A case study of a wat county in Xingjiang[J]. Xinjiang Agricultural Sciences, 2012, 49(7): 1366-1370. (in Chinese with English abstract)
[30] 蒋斌,贾克斌. 一种用于表情识别的局部判别分量分析算法[J]. 电子学报,2014,42(1):155-159. Jiang Bin, Jia Kebin. A local discriminative component analysis algorithm for facial expression recognition[J]. Acta Electronica Sinica, 2014, 42(1): 155-159. (in Chinese with English abstract)
[31] 谢嘉丽,李永树,李何超,等. 利用灰度共生矩阵纹理特征识别空心村损毁建筑物的方法[J]. 测绘通报,2017(12):90-93. Xie Jiali, Li Yongshu, Li Hechao, et al. Recognition of damage buildings in hollow village based on texture feature of gray level co-ocurrence matrix[J]. Bulletin of Surveying and Mapping, 2017(12): 90-93. (in Chinese with English abstract)
Extraction of rice planting information based on remote sensing image from UAV
Li Ming1,3, Huang Yuqi1, Li Xumeng2, Peng Dongxing1, Xie Jingxin1
(1,,410128,; 2.,410128,; 3.,410100,)
The rice is the main crop in China. Based on the advantages of flexibility, high accuracy and short working cycle of the unmanned aerial vehicle (UAV), in this paper, we aim to establish a method for the investigation of rice planting area by UAV remote sensing image. The six-rotor UAV's camera image sensor is CMOS with FOV94. The focus is on infinity. The maximum single pixel is 4 000×3 000 pixels. The experimental region and verification region mainly included rice, tree, grassland, bare land, water body and buildings and so on. At first, the multiple images with overlapped region were obtained by UAV. The complete images of the experimental region and the verification region were obtained by Agisoft photoscan software. The image spatial resolution of the experimental region was 0.04 m and the verification region was 0.02 m. The multiresolution segmentation algorithm of eCognition Developer 9 software was used to segment the complete image of the experimental region and the verification region to obtain several objects and calculate the spectral, geometric, and texture features of each object. Using multiresolution segmentation algorithm to segment the image, the scale parameter of experimental region: scale=480, shape=0.1, compact=0.1, and the total number of objects after the segmentation were 880. The scale parameter of experimental region: scale=1 500, shape=0.1, compact=0.3, a total of 240 split object after segmentation. Subjects in the experimental region and the verification region were divided into training samples and verification samples. Training samples in the experimental region were used to extract characteristic indexes for identifying rice, binary logistic model training samples for identifying rice, and establishment and verification of characteristic indexes. The sample was used to test the race recognition model. The characteristics indexes of race identified in this study were shape index, red mean, red standard deviation Max.diff (maximum difference), GLCM contrast (gray-level co-occurrence matrix contrast) and GLCM dissimilarity(gray-level co-occurrence matrix contrast dissimilarity). The red mean was the index for distinguishing vegetation cover (rice, grassland, tree) and non-vegetation covered objects (bare land, water body, building); red standard deviation and Max.diff (maximum difference) value depicted the color change of rice and grassland; and the color of rice was relatively uniform, with uneven growth and relatively large changes in color. The color of rice and tree changes was small, but the border of the tree was fragmented, the shape index was larger, and the shape index can effectively distinguish between the color mean and the change of rice and tree body. The texture features reflected the slowly-changing or periodically changing structure and arrangement properties of the land surface. Rice, tree, grassland, bare land, water body, and building all had certain differences. It was reasonable to distinguish the six characteristic indexes from the test area and the verification area based on the mechanism analysis, including shape index, red mean, red standard deviation, Max.diff (maximum difference). Based on GLCM contrast (gray-level co-occurrence matrix contrast) and GLCM dissimilarity (gray-level co-occurrence matrix contrast dissimilarity), six characteristic indexes Logistic model of discriminating two classifications of rice land lots, experimental region’s identification of training sample set the correct rate was 100%, the correct rate of validation sample set was 97%, and the overall correct rate was 98%. When the correct rate of training sample set was 100%, the correct rate of validation sample set was 99%, the overall correct rate was 99% on the verification region. Based on the image pixel method, the area of rice was measured and the area error was less than 3.5% compared with the result of visual interpretation. This method had a good effect in identifying paddy fields and high accuracy in area estimation. Therefore, this study had some applicability to the use of UAV visible light remote sensing imagery to survey rice planting information, and had certain reference value for rice census. The results showed that the growth period of paddy rice in the wrongly classified rice lags behind and had not been closed yet. Therefore, this method identified the influence of paddy field growth period on paddy fields and carries out multiple surveys at different times to further improve the method of identifying paddy rice plots the effective way to correct rate.
unmanned aerial vehicle; remote sensing; crops; visible; rice; multi-feature
2017-10-28
2018-01-10
湖南省创新平台与人才计划(2017RS3061);长沙市高新技术产业发展专项重点项目(K1508073-11);湖南省技术创新引导计划(2016GK4123);基于无人机数据采集平台水稻水肥精准管理关键技术的研究与示范(2017NK2382)
李 明,博士后,教授,博士生导师,主要从事精准农业及机器人研究。Email:liming@hunau.net。中国农业工程学会会员:李明(E041200580S)。
10.11975/j.issn.1002-6819.2018.04.013
S127
A
1002-6819(2018)-04-0108-07
李 明,黄愉淇,李绪孟,彭冬星,谢景鑫. 基于无人机遥感影像的水稻种植信息提取[J]. 农业工程学报,2018,34(4):108-114.doi:10.11975/j.issn.1002-6819.2018.04.013 http://www.tcsae.org
Li Ming, Huang Yuqi, Li Xumeng, Peng Dongxing, Xie Jingxin. Extraction of rice planting information based on remote sensing image from UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 108-114. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.04.013 http://www.tcsae.org
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
浙江人大(2022年4期)2022-04-28
医学食疗与健康(2022年3期)2022-04-23
天津医科大学学报(2021年1期)2021-01-26
中华养生保健(2020年7期)2020-11-16
商周刊(2019年19期)2019-10-17
今日农业(2019年10期)2019-01-04
自动化学报(2017年5期)2017-05-14
家教世界·创新阅读(2016年11期)2016-12-27
故事会(2016年15期)2016-08-23